1.本发明有关于侦测装置以及自动清扫机,特别有关于可侦测液体或胶体的侦测装置以及自动清扫机。
背景技术:
2.自动清扫机(例如扫地机器人)近年来变得越来越流行。自动清扫机可以判断本身位置并相对应的执行清扫动作。然而,传统的自动清扫机不具备侦测液体或胶体的功能,但即使自动清扫机不具备清扫液体和胶体的能力,仍会对液体或胶体进行清扫动作。这样的动作可能会给使用者带来一些不便。例如,若自动清扫机是吸尘器,其仍会尝试着清扫液体和胶体。这样的动作,可能会让周围的环境状况变得更加糟糕,或是损坏自动清扫机本身。
技术实现要素:
3.因此,本发明一目的为提供一种可侦测液体或胶体的侦测装置。
4.本发明另一目的为提供一种可侦测液体或胶体的自动清扫机。
5.本发明一实施例公开了一种侦测装置,用以侦测液体或胶体,包括:发光装置,用以发出第一光,其中当该侦测装置位于表面上时,该第一光的第一发射方向以及该表面间存在着第一夹角,其中该第一夹角大于0
°
且小于90
°
;光学传感器,用以感测依据该第一光而产生的第一光学数据;以及处理电路,用以依据该第一光学数据判断该液体或该胶体是否存在于该侦测装置的预定范围内。
6.本发明另一实施例公开了一种自动清扫机,包括:发光装置,用以发出第一光,其中当该自动清扫机位于表面上时,该第一光的第一发射方向以及该表面间存在着第一夹角,其中该第一夹角大于0
°
且小于90
°
;光学传感器,用以感测依据该第一光而产生的第一光学数据;以及处理电路,用以依据该第一光学数据判断该液体或该胶体是否存在于该自动清扫机的预定范围内;其中该处理电路更用以依据导航光学数据判断该自动清扫机的位置。
7.根据前述实施例,可以根据光学数据来侦测液体或胶体。此外,可以更容易地组装用以液体/胶体侦测的发光装置。
附图说明
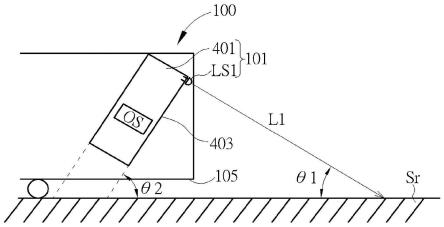
8.图1绘示了根据本发明一实施例的自动清扫机的示意图。
9.图2和图3为根据本发明实施例、如何根据光学数据判断液体或胶体的示意图。
10.图4、图5、图6为根据本发明不同实施例的发光装置的示意图。
11.图7和图8为根据本发明不同实施例、包括两光源的发光装置的动作示意图。
12.图9和图10为根据本发明不同实施例的发光装置的示意图。
13.其中,附图标记说明如下:
14.100 自动清扫机
15.101 发光装置
16.103 处理电路
17.105 底面
18.401 电路板
19.403 板面
20.901 液体/胶体
21.1001 障碍物
22.l1 第一光
23.ls1 第一光源
24.l2 第二光
25.ls2 第二光源
26.os 光学传感器
27.op1 第一光学数据
28.op2 第二光学数据
29.sr 表面
30.θ1 第一夹角
31.θ2 第二夹角
具体实施方式
32.以下将以多个实施例来描述本发明的内容,还请留意,各实施例中的组件可通过硬件(例如装置或电路)或是韧体(例如微处理器中写入至少一程序)来实施。此外,以下描述中的”第一”、”第二”以及类似描述仅用来定义不同的组件、参数、数据、信号或步骤。并非用以限定其次序。例如,第一装置和第二装置可表示这两个装置可具有相同架构但为不同的装置。
33.另外,在以下实施例中,是以自动清扫机为例进行说明。然而,本发明公开的概念可以应用于不执行清洁动作的任何其他侦测装置。此外,在下面的描述中,“a和b之间存在夹角”的描述,可表示a和b确实接触,且a和b之间存在夹角。但是,“a和b之间存在夹角”的描述也可以表示a和b没有物理接触且a的延长线和b本身之间存在夹角,或者是指a本身和b的延长线之间存在夹角。另外,在以下描述中,术语“液体/胶体
””
的意思是“液体或胶体”。
34.图1为绘示了根据本发明一实施例的自动清扫机的示意图。如图1所示,自动清扫机100包括发光装置101、光学传感器os和处理电路103。请注意,虽然在图1的实施例中,光学传感器os和发光装置101是两个独立的装置。在其他实施例中,光学传感器os可以整合到发光装置101。稍后将更详细地描述这些实施例。
35.发光装置101用以发射第一光ll。当侦测装置100位于表面sr上时,第一光l1的第一发射方向与表面sr之间存在第一夹角θ1,其中第一夹角θ1大于0
°
且小于90
°
。换言之,发光装置101用以发射第一光l1至表面sr,且第一光l1既不垂直于表面sr也不平行于表面sr。光学传感器os用以侦测依据第一光l1产生的第一光学数据(例如,影像或具有光学特征的任何光学数据)。处理电路103用以依据第一光学数据判断自动清扫机100的预定范围内是否存在液体或胶体。自动清扫机100可以根据处理电路103的判断结果进行控制。例如,如果
存在液体或胶体,则可以控制自动清扫机100绕过液体或胶体,而不进行清扫动作。
36.表面sr可以是任何表面,例如地面或家具表面。第一夹角θ1可以根据不同的需求进行设置。举例来说,若第一光l1具有较强的光强度(或称为发光强度),则可将第一夹角θ1设定得较小,使得第一光l1可发射至距离发光装置101较远的位置。反之,若第一光l1的光强度较弱,则可将第一夹角设定得较大,使第一光l1射出至较接近发光装置101的位置。还请留意,前述第一当自动清扫机100位于表面sr上时,如果底面105与表面sr平行,第一夹角θ1也可以被认为是底面105与第一发射方向之间的夹角。另外,在一实施例中,第一夹角θ1与光学传感器os的感测能力有关。如果光学传感器os具有良好的感测能力,则第一夹角θ1可以更小,因为光学传感器os可以侦测到离它更远的第一光学数据。反之,如果光学传感器os的感测能力较差,则第一夹角θ1可以更大,因为光学传感器os只能侦测到靠近它的第一光学数据。此外,在一实施例中,第一夹角θ1可以在自动清扫机100运作时改变。
37.前述预定范围可以是任何所需要的范围。在一实施例中,预定范围是指第一光l1可以到达的表面sr的范围。在另一实施例中,预定范围是预先设定好的范围。另外,在一实施例中,发光装置101是沿着自动清扫机100的移动方向发出第一光l1,以侦测发光装置101前方的预定范围内是否有液体或胶体。
38.在一实施例中,处理电路103还用以根据导航光学数据判断自动清扫机100的位置。导航光学数据可以是上述的第一光学数据,也可以是依据发光装置101以外的其他光源发出的光产生的光学数据。在得到自动清扫机100的位置后,会相应的控制自动清扫机100。例如,控制自动清扫机100以根据其多个位置执行清扫动作。根据自动清扫机100的位置对其进行控制的细节为本领域技术人员所熟知,在此不再赘述。如上所述,本发明公开的概念可以应用在任何其他侦测设备。在这种情况下,处理电路103中可不包含“基于导航光学数据侦测位置”的功能。
39.在一实施例中,处理电路103根据第一光ll的反射光的扩散程度来判断预定范围内是否存在液体或胶体。图2和图3为根据本发明实施例的,如何根据光学数据判断液体或胶体的示意图。在图2的实施例中,第一光l1是线光。如果线光射向障碍物,例如家具,则大部分线光会被反射或吸收,因此由线光形成的第一光学数据op1具有较窄的曲线形状,如图2的上图所示。反之,若将线光射向液体或胶体,则由于液体或胶体具有导光能力,因此线光会扩散开来,因此第一光学数据op1具有较宽的曲线形状,如图2的下图所示。简言之,自动清扫机100在移动时,如果前方没有液体或胶体时,第一光学数据op1将持续维持如图2的上图所示的曲线形状,相对的,在自动清扫机100移动过程中,若前方出现有液体或胶体时,第一光学数据op1则会变化成如图2的下图所示的曲线形状。
40.此外,在图3的实施例中,第一光ll是点光。如果点光射到障碍物上,例如家具,大部分点光会被反射或吸收,因此点光形成的第一光学数据op1的点形状较小,如图3中上图所示。反之,若将点光射向液体或胶体,则由于液体或胶体具有导光能力,因此点光会扩散开来,因此第一光学数据op1具有较大的点状,如图3下图所示。
41.上述发光装置101可以具有各种结构。图4、图5、图6为根据本发明不同实施例的发光装置的示意图。如图4所示,发光装置101包括电路板401和第一光源ls1。电路板401包括与表面sr垂直的板面403。即,当底面105与表面sr平行时,板面403与底面105垂直。第一光源ls1设置在电路板401上,用以发射第一光l1,其中板面403与第一发射方向之间存在第二
夹角θ2,第一夹角θ1与第二夹角θ2之和为90
°
。换言之,在图4的实施例中,电路板401与表面sr或底面105垂直,且第一光源ls1相对于板面403倾斜。
42.请注意,在图4的实施例中,光学传感器os位于电路板401内或电路板401上。然而,光学传感器os可以是物理上独立于电路板401的装置。
43.在图5的实施例中,发光装置101包括电路板401和第一光源ls1。电路板401包括板面403。电路板401与表面sr之间具有第二夹角θ2,第一夹角θ1与第二夹角θ2之和为90
°
。即,当底面105与表面sr平行时,板面403与底面105之间存在第二夹角θ2。第一光源ls1设置在板面403上,用以发出第一光l1,其中第一发射方向垂直于板面403。换句话说,在图5的实施例中,当第一光源ls1垂直于板面403时,电路板401倾斜于底面105或表面sr。
44.请注意,在图5的实施例中,光学传感器os位于电路板401之内或之上,其中图4与图5虽然绘示位于电路板401之内,但于另外一未绘示的实施态样,也可以是位于电路板401之上。也就是说,光学传感器os可以物理上独立于电路板401。请参照图5,电路板401可以更容易地组装到自动清扫机上,因为只需要与电路板401的倾斜角度相对应的至少一组装部分。而且,由于电路板401是倾斜的,其上或其内设置的光学传感器os可以侦测更大的范围,因此即使第一光l1的光强度较弱或第一光l1照到的区域离光学传感器os较远,光学传感器os仍然可以清楚的感测到第一光学数据。此外,图4和图5中的实施例可以结合。例如,当电路板401倾斜于底面105或表面sr时,第一光源ls1倾斜于板面403。
45.在一实施例中,发光装置101还用以发射第二光l2(图1中未示出)。也就是说,发光装置101包括多个光源。第一光l1具有第一波长,而第二光l2具有不同于第一波长的第二波长。在一实施例中,第一波长为850nm,第二波长为440nm,但不限于此。
46.图6绘示了包括多个光源的发光装置101的例子。还请留意,图6的例子应用了图5的实施例,但图6可以应用在任何其他发光装置,例如图4所示的实施例。举例来说,图9和图10中的实施例绘示了图4中的发光装置具有一个以上光源的实施例。
47.如图6所示,第一光源lsl和第二光源ls2分别设置在电路板401上。第一光源lsl用以发射第一光ll,第二光源ls2用以发射第二光l2。在一实施例中,第二光源ls2的第二发射方向平行于第一发射方向,但不以此为限。
48.在一实施例中,第一光l1和第二光l2均用在侦测液体或胶体。在这样的实施例中,第一光l1和第二光l2可以交替地用于侦测液体或胶体。例如,处理电路103根据第一光l1产生的第一光学数据和第二光l2产生的第二光学数据判断液体或胶体是否存在。在这样的例子中,当处理电路103根据第一光学数据判断液体或胶体不存在,或根据第二光学数据判断液体或胶体不存在,则不会判断液体或胶体确实存在。相反的,当处理电路103根据第一光学数据判断液体或胶体存在,且根据第二光学数据判断液体或胶体存在,则判断液体或胶体确实存在。
49.在一实施例中,第一光ll和第二光l2使用于不同的功能。例如,第一光l1和第二光l2中的其中一个用于侦测障碍物,而第一光l1和第二光l2中的另一个用于侦测液体或胶体,例如图9和图10所示的实施例。
50.在一实施例中,发光装置101在不同的时间发出第一光l1和第二光l2。图7和图8为根据本发明不同实施例的,包括两光源的发光装置的动作示意图。如图7所示,第一光l1与第二光l2会交替发出,因此光学传感器os会交替感测到第一光学数据op1与第二光学数据
op2。在图8的实施例中,第一光l1会被发出多次(在本例中为2次),然后切换到第二光l2。然后,第二光l2被发出多次(在本例中为2次),然后切换到第一光l1。因此,光学传感器os会多次感测相同类型的光学数据,然后切换到另一种类型的光学数据。
51.在一实施例中,具有多个光源的发光装置可以提供更准确的液体/胶体侦测。图9和图10为根据本发明不同实施例的发光装置的示意图。请注意,在图9和图10的实施例中,为了方便说明,是将图4的实施例修改为具有两个光源。在图9和图10的实施例中,第一光l1可用在障碍物侦测(或称为物体侦测),第二光l2可用在液体/胶体侦测。
52.在图9的上图中,自动清扫机100与液体/胶体901之间的距离为第一距离。在这种情况下,由于自动清扫机100远离液体/胶体901,因此只有第一光l1可以到达液体/胶体901。然而,由于自动清扫机100远离液体/胶体901,光传感器os仅感测到少量液体/胶体901所导引的光,因此自动清扫机100无法侦测到液体/胶体901的存在。此外,在图9的下图中,自动清扫机100和液体/胶体901之间的距离是小于第一距离的第二距离。在这种情况下,由于自动清扫机100靠近液体/胶体901,因此只有第二光l2可以到达液体/胶体901。因此,自动清扫机100可以侦测到液体/胶体901的存在。
53.在图10的上图中,自动清扫机100与障碍物1001(或称为物体)之间的距离为第三距离。在这种情况下,由于自动清扫机100远离障碍物1001,因此只有第一光l1可以到达障碍物1001。虽然自动清扫机100远离障碍物1001,但由于障碍物1001反射的光可能比液体/胶体901产生的反射光强,光学传感器os仍然可以感应到反射光,因此自动清扫机100可以侦测到障碍物1001的存在。此外,在图10的下图中,自动清扫机100和障碍物1001之间的距离是小于第三距离的第四距离。在这种情况下,由于自动清扫机100靠近障碍物1001,因此只有第二光l2可以到达障碍物1001。如果障碍物1001具有导光能力,自动清扫机100可能会错误地判断障碍物1001是液体/胶体。
54.因此,依据图9的实施例,如果没有依据第一光l1侦测到液体/胶体,然后依据第二光l2侦测到了液体/胶体,则自动清扫机100判断液体/胶体确实存在。相反的,依据图10的实施例,如果依据第一光l1侦测到障碍物然后依据第二光l2侦测到液体/胶体,则自动清扫机100判断液体/胶体不存在。
55.换句话说,图1所示的处理电路103根据第一光ll产生的第一光学数据判断是否存在障碍物,并根据第二光l2产生的第二光学数据是否存在液体或胶体。如果依据第一光学数据未侦测到液体/胶体,然后依据第二光学数据侦测到液体或胶体,则处理电路103判断存在液体/胶体。相反的,如果依据第一光学数据侦测到障碍物,然后依据第二光学数据侦测到液体/胶体,则处理电路103判断液体/胶体不存在。通过这样的方法,液体/胶体的侦测可以更准确。
56.根据前述实施例,可以根据光学数据来侦测液体或胶体。此外,可以更容易地组装用以液体/胶体侦测的发光装置。
57.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。