1.本发明涉及一种用于感应式位置测量装置的扫描元件,位置测量装置用于确定扫描元件相对于两个能以不同速度旋转的标度元件的位置,本发明还涉及具有这种扫描元件的位置测量装置。
背景技术:
2.感应式位置测量装置例如用作用于确定可相对彼此旋转的机器部件的角位置的角度测量设备。在感应式位置测量装置中,激励器线路和接收器线路通常例如以导体路径的形式被安装在主要是多层的公共电路板上,该电路板例如固定地连接至角度测量设备的定子。与该电路板相对地设有标度元件,在其上装有分度结构体,并且标度元件与角度测量设备的转子抗扭地连接。如果将随时间变化的激励电流施加到激励器线路上,则在转子与定子之间的相对旋转期间在接收器线圈中生成取决于角位置的信号。然后在评估电子设备中进一步处理这些信号。
3.尤其在机器人的驱动装置中,感应式位置测量装置通常用作用于确定驱动轴的角位置并且同时用于精确确定输出轴的角位置的测量装置,其中,驱动轴的运动由减速传动装置引导到输出轴中。在这种情况下,借助于包括电路板的扫描元件来测量角位置或角位,该电路板在两侧具有相应的检测器单元,从而可以确定在电路板的两侧可旋转地布置的标度元件的相应的角位置。
4.在jp 2006208239 a中,特别根据那里的图示6公开了具有两个转子的位置测量装置,在转子之间设有定子。在那里描述的位置测量装置例如用在微米螺栓中。
技术实现要素:
5.本发明的基本目的是提出一种用于感应式位置测量装置的扫描元件,该扫描元件相对精确地工作并且能被紧凑和低成本地制造,通过该扫描元件能够实现对两个标度元件的位置或角度方位的确定。
6.根据本发明,该目的如下地实现。
7.适合并设计用于感应式位置测量装置的扫描元件包括具有第一检测器单元和第二检测器单元的多层电路板以及电子组件。第一检测器单元具有第一激励器线路和第一接收器线路并且布置在电路板的第一层和第二层中。第二检测器单元具有第二激励器线路和第二接收器线路并且布置在电路板的第三层和第四层中。电路板具有在检测器单元之间的几何中央平面,其中,第一接收器线路和第二接收器线路在周向方向上围绕轴线环绕布置。第一接收器线路包括第一接收器导体路径,并且第二接收器线路包括第二接收器导体路径。这些接收器线路各自具有周期性的走向(verlauf)。第一接收器线路沿着其延伸方向具有第一空隙,第一空隙在周向方向上由第一接收器导体路径界定。第二接收器线路沿着其延伸方向具有第二空隙,第二空隙在周向方向上由第二接收器导体路径界定。电路板具有通孔,通孔不仅布置在第一空隙内,还布置在第二空隙内。特别地,通孔相对于轴向方向相
应布置在第一接收器导体路径与第二接收器导体路径之间。
8.在确定本发明内容的空间布置的方面能够首先限定第一方向x。第一方向x代表如下方向,在该方向上测量所寻找的位置(测量方向)。因为通过位置测量装置分别在围绕(转动)轴的旋转和摆动运动方面应当测量第一标度元件与扫描元件之间的第一相对角度位置并且同时测量第二标度元件与扫描元件之间的第二角度位置,所以第一方向x是周向方向或切线方向。
9.此外,能够限定第二方向y,其垂直于第一方向x地延伸。
10.垂直于第一方向x并且同时垂直于第二方向y地定位第三方向z。第三方向z平行于(转动)轴延伸,围绕其使标度元件能相对于扫描元件旋转。此外,第三方向z垂直于中央平面地定向。电路板的各个位置在第三方向z上相互错开地布置。
11.特别地,端部、即通孔的触点布置在第一空隙内并且另外的端部或者另外的触点布置在第二空隙内。特别地,通孔能够在第三方向z上延伸。
12.电路板的两个最大的面通常相互平行地定位。特别地,中央平面平行于这些面地布置在这些电路板平面之间,从而特别在第三方向z上使电路板的面距中央平面的间距正好等于电路板的另外的面距中央平面的间距。
13.在本发明的另一个设计方案中,第一激励器线路和第二激励器线路沿着周向方向或沿着第一方向x延伸。
14.第一接收器线路和第二接收器线路有利地沿着周向方向或者沿着第一方向x像第一激励器线路和第二激励器线路那样延伸。
15.扫描元件有利地设计为使第一激励器线路和第二激励器线路电串联连接。
16.第一激励器线路和第二激励器线路有利地能被供应激励电流,激励电流通常具有时间上交替的电流强度(交流电或混合电)。激励电流能借助于电子组件生成,即其过程走向能由电子组件形成。在电流强度和电压强度之间存在物理关联之后,当然能够也同样考虑激励电压。
17.在本发明的另一个设计方案中,能由第一接收器线路和第二接收器线路生成的信号能借助于特别形成评估电路的电子组件被进一步处理。
18.因此,电子组件能够是不同电路的元件或者配属于不同的电路。例如,确定的电子组件能够是用于生成激励电流的电路的元件,或者另外的电子组件能够是用于评估或者进一步处理信号的另外的电路的元件。
19.电路板有利地设计成,通孔使第一检测器单元与第三层或与第四层电连接。可选地,通孔能够使第二检测器单元与第一层或与第二层电连接。特别地,通孔能与相应位于第一、第二、第三或第四层中的导体路径连接。
20.在本发明的另一个设计方案中,通孔与电子组件之一电连接,从而能为电子组件输送通过通孔的特别的信号,其由第一检测器单元或第二检测器单元或者其接收器导体路径生成。
21.在本发明的有利的设计方案中,通孔实施为过孔(through hole via)。特别地,通孔由穿过电路板的通过式孔制成。优选地,孔在内壁设置有金属层、特别是铜镀层。通孔的上触点和下触点形成与导体路径、导体层或电子组件的电接触。通孔的概念在接下来也被理解为布置,在其中相互错开(特别是在径向方向或在周向方向上)地设置多个以能导电的
材料填充或镀层的孔或空腔。通常这种通孔也被称为交错孔。
22.在本发明的另一个设计方案中,第一空隙在周向方向上延伸第一长度,其中,第一接收器导体路径具有带第一周期长度λ1的周期性走向。在此,第一长度大于或等于第一周期长度λ1的1/8,即l1(第一周期长度)≥1/8
·
λ1。
23.扫描元件有利地设计为,第二空隙在周向方向上延伸第二长度,并且第二接收器导体路径具有带第二周期长度λ2的周期性走向。在该情况下,第二长度大于或等于第二周期长度λ2的1/8,即l2(第二周期长度)≥1/8
·
λ2。
24.在本发明的另一个设计方案中,第一接收器导体路径具有带第一周期长度λ1的周期性走向,并且第二接收器导体路径具有带第二周期长度λ2的周期性走向。第二周期长度λ2大于或等于第一周期长度λ1(λ2≥λ1)。
25.在本发明的有利的设计方案中,第二检测器单元和电子组件中的至少一个电子组件布置在电路板的同一侧上。因此,在该结构中,第二检测器单元和电子组件在相同的方向上相对于中央平面错开,从而使中央平面不布置在第二检测器单元与电子组件之间。
26.有利地,第一检测器单元具有第三接收器线路并且第二检测器单元具有第四接收器线路。特别地,第三接收器线路随后能够包括第三接收器导体路径,其中,第三接收器导体路径具有周期性的走向,并且第三接收器导体路径的周期长度小于第一接收器导体路径的第一周期长度λ1。此外,第四接收器线路能够包括第四接收器导体路径,其中,第四接收器导体路径具有周期性的走向,并且第四接收器导体路径的周期长度大于第二接收器导体路径的第二周期长度λ2。
27.在本发明的另一个设计方案中,第一检测器单元具有第三激励器线路,并且第二检测器单元具有第四激励器线路。
28.在有利的设计方案中,第一屏蔽层布置在电路板的第五层中,并且第二屏蔽层布置在电路板的第六层中,其中,通孔穿过第一屏蔽层和第二屏蔽层,特别不与屏蔽层电接触。中央平面在第一屏蔽层与第二屏蔽层之间,从而因此使屏蔽层布置在中央平面的两侧。
29.中央平面相对于第三方向z在第一检测器单元与第一屏蔽层之间。接下来同样适用的是,中央平面相对于第三方向z在第二探测器与第二屏蔽层之间,或者第二探测器和第二屏蔽层布置在中央平面的两侧。
30.根据另一个方面,本发明还包括具有扫描元件以及第一标度元件和第二标度元件的感应式位置测量装置。标度元件在第三方向z(正交于中央平面)上在电路板的两侧隔开布置。
31.有利地,第一刻骨元件具有第一直径d1,并且第二标度元件具有第二直径d2,其中,第一直径d1大于第二直径d2(d1》d2)。
32.此外,标度元件能够围绕共同的轴相对于扫描元件环绕布置。
33.此外,电子组件中的至少一个电子组件与第二标度元件的外轮廓相比能够距轴线更远地隔开布置。因此,至少一个电子组件布置在第二标度元件的径向外部。
34.根据本发明的扫描元件的另外的细节和优点从根据附图的实施例的以下描述中得出。
附图说明
35.图1是包括扫描元件、第一标度元件和第二标度元件的位置测量装置的立体图,
36.图2是扫描元件的第一侧的平面图,
37.图3是扫描元件的第一侧的详细视图,
38.图4是扫描元件的第二侧的平面图,
39.图5是扫描元件的第二侧的详细视图,
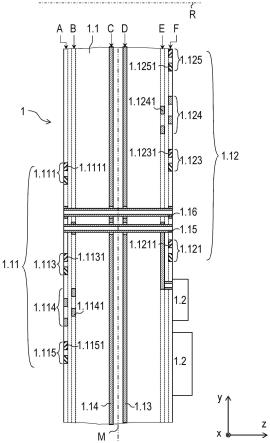
40.图6是通过扫描元件的线p-p的详细局部视图,
41.图7是在通孔的区域中的通过扫描元件的详细局部视图,
42.图8是第一标度元件的平面图,
43.图9是第二标度元件的平面图。
具体实施方式
44.本发明根据图1的位置测量装置描述,其具有扫描装置1,其不仅能够用于检测第一标度元件2的角度位置,还能够检测第二标度元件3的角度位置。两个标度元件2,3能相对于扫描元件1围绕轴线r环绕布置。这种位置测量装置例如能够应用在转子的驱动装置中。随后,第二标度元件3例如与发动机的驱动轴抗扭地连接。驱动轴又与具有传动轴的减速传动装置连接。第一标度元件2利用该传动轴旋转。以该方式例如能够借助于第二标度元件3设置用于发动机的换向的角度位置,并且借助于第一标度元件2设置用于定位机器人的相对高精确的角度位置。
45.扫描元件1包括带多个层的电路板1.1以及安装在电路板1.1上的电子组件1.2。扫描元件1用于扫描第一标度元件2并且同时用于扫描第二标度元件3。在所示的实施例中,电子组件1.2仅安装在第二侧上。然而可选或附加地,还能在电路板1.1的第一侧安装电子组件。
46.为了确定角度信息,在电路板1.1的第一侧布置第一检测器单元1.11,并且在电路板1.1的第二侧布置第二检测器单元1.12。在图1中仅看到第二检测器单元1.12的这种结构,其位于外面的第四层f上(见图6和图7)。
47.另一方面,在图2和图3(图3是根据图2的第一检测器单元1.11的放大细节图)中示出了第一检测器单元1.11的这种结构,其在电路板1.1的外面的第一层a中并且在电路板1.1的第二层b中。第一检测器单元1.11包括第一激励器线路1.111,、第一接收器线路1.112、第三激励器线路1.113、第三接收器线路1.114和第五激励器线路1.115。第一接收器线路1.112包括第一接收器导体路径1.1121。
48.图4和图5示出了电路板1.1的另一侧,以使第二检测器单元1.12可见。图5示出了第二检测器单元1.12的放大细节。另一方面,在图4和图5中示出了第二检测器单元1.12的这种结构,其在电路板1.的外面的第四层f中并且在电路板的第三层e中。第二检测器单元1.12包括第二激励器线路1.121、第二接收器线路1.122、第四激励器线路1.123、第四接收器线路1.124和第六激励器线路1.125。第二接收器线路1.122包括第二接收器导体路径1.1221。
49.图6示出了根据通过扫描元件1或者电路板1.1的切割线p-p的示意性局部剖面图,其中,出于简明原因放弃电路板1.1的电绝缘材料的阴影线。此外,图6的局部剖面图为了更
好地阐述根据本发明的扫描元件1而不是按比例设计的。电路板1.1如上面已经提到那样多层地构建。在几何结构上注意的是,能够为电路板1.1限定所谓的中央平面m,其平行于电路板1.1的第一侧或者平行于第二侧地布置在第一侧与第二侧中间。此外,各个元件的几何的关系能够相互借助于坐标系限定。在此,第一方向x是如下方向,通常应沿该方向测量位置或角度。在当前的实施例中,第一方向x对应于周向方向。用于使标度元件2,3能围绕旋转的轴线r平行于第三方向z延伸,第三方向z能够随后在此也限定为轴向方向。垂直于第三方向z和第一方向x地定位第二方向y,其也被称为径向方向。因此,由x和y轴展开的平面平行于中央平面m地定向,并且第三方向z以及轴线r垂直于中央平面m地延伸。
50.在电路板1.1的第一层a和在电路板1.1的第二层b中布置有第一检测器单元1.11,而在第三层e和第四层f中布置有第二检测器单元1.12。第一层a在电路板1.1的紧接第一侧的位置,并且第二层b在电路板1.1的紧接第一侧的第二位置。有关电路板1.1的第二侧的位置同样适用于第四层f和第三层e。
51.第一检测器单元1.11的激励器线路1.111,1.113,1.115包括在第一层a延伸的激励导体路径1.1111,1.1131,1.1151。类似地,第二检测器单元1.12的激励器线路1.121,1.123,1.125包括在第四层f延伸的激励导体路径1.1211,1.1231,1.12511。
52.此外,电路板1.1还包括第五层d和第六层c。在第五层d中存在第一屏蔽层1.13并且在第六层c中存在第二屏蔽层1.14。屏蔽层1.13,1.14在此是面积相对较大的铜镀层。
53.第一单侧单元1.11的激励器线路1.111,1.113,1.115包围第一接收器线路1.112或者第三接收器线路1.114。
54.第二检测器单元1.12的激励器线路1.121,1.123,1.125包围第二接收器线路1.122或者第四接收器线路1.124。激励器线路1.111,1.113,1.115,1.121,1.123,1.125以及接收器线路1.112,1.114,1.122,1.124沿着周向方向或者沿着第一方向x延伸。
55.接收器线路1.112,1.114,1.122,1.124中的每一个在当前的实施例中分别包括接收器导体路径1.1121,1.1141,1.1221,1.1241,其在周向方向上错开地布置,从而使其能够根据偏移量提供四个相移的信号。在附图中仅以一个标号标注一个或相同的接收器线路1.112,1.114,1.122,1.124。因此,接下来例如第一接收器线路1.112的所有的接收器导体路径1.1121仅以一个标号标注。此外,第一检测器单元1.11的第一接收器导体路径1.1121在电路板1.1的不同的层与通孔连接,从而在交叉点避免了不期望的短路。这同样适用于第二检测器单元1.12的接收器导体路径1.1221,1.1241。既然第一和第二接收器导体路径1.1121,1.1221中的每个都正好由四个分别分布在两个平面或者层中并且相互串联的导体块组成,那么接下来这种结构总体标记为接收器导体路径1.1221,1.1241。
56.接收器导体路径1.1121,1.1141,1.1221,1.1241具有在空间方面周期性的走向,其基本上设计为正弦的。第一接收器线路1.112的接收器导体路径1.1121具有周期长度λ1(图3),而第二接收器线路1.122的接收器导体路径1.1221具有周期长度λ2(图5)。在当前的实施例中,在接收器线路1.112,1.114,1.122,1.124内相邻的接收器导体路径1.1121,1.1141,1.1221,1.1241相互错开整个正弦周期的1/8(沿着周向方向或第一方向x的π/4或45
°
)地布置。接收器导体路径1.1121,1.1141,1.1221,1.1241电连接,以使其一方面提供0
°
和90
°
的信号并且另一方面提供45
°
和135
°
的信号。能够从0
°
和90
°
的信号确定位置信号并且从45
°
和135
°
的信号确定有关第一位置信号的冗余的第二位置信号。
57.在当前的实施例中,第二周期长度λ2大于第一周期长度λ1。
58.如图2和图3所示,第一接收器线路1.112沿着其在周向方向(x方向)上的延伸具有第一空隙u1。第一空隙u1的区域由第一接收器导体路径1.1121限定,从而因此在限定的接收器导体路径1.1121之间不存在探测器结构。因此,在一级近似中,第一空隙u1是在几何上视为环形扇区的区域。在第一空隙u1的区域中的两个第一接收器导体路径1.1121之间在周向方向上的最小间距l1在当前的实施例中为5/8
·
λ1(u1=5/8
·
λ1)。因此,在第一空隙u1的区域中不布置周期延伸的第一接收器导体路径1.1121。
59.根据图4和图5,第二接收器线路1.122沿着其在周向方向上的延伸具有第二空隙u2。该第二空隙u2由第二接收器导体路径1.1221限定。在第二空隙u2的区域中的两个第二接收器导体路径1.1221之间在周向方向上的最小间距l2在当前的实施例中为13/8(u1=13/8
·
λ1)。因此,在第二空隙u2的区域中不布置周期性延伸的第二接收器导体路径1.1221。
60.此外,电路板1.1具有通孔1.15,1.16。图7示出了在通孔1.15,1.16的区域中通过扫描元件1或者通过电路板1.1的示意性局部剖面图。通孔1.15,1.16在此实施为过孔并且随后穿过电路板1.1的整个厚度。因此,通孔1.15,1.16平行于第三方向z延伸。电路板1.1随后设计为,使得通孔1.15,1.16不仅布置在第一空隙u1内,还布置在第二空隙u2内。
61.借助于通孔1.15使第一接收器线路1.112的第一接收器导体路径1.1121与布置在中央平面m的这一侧的电子组件1.2电连接。为了该目的,通过在第二层b中延伸的导体路径利用在图7中不可见的第一接收器导体路径1.1121建立至通孔1.15的电接触。通孔1.15穿过第一屏蔽层1.13和第二屏蔽层1.14,其中,屏蔽层1.13,1.14结构设计为使其不与通孔1.15电连接。在第三层e现在建立至在该层e中延伸的导体路径的接触。该导体路径与另外的通孔、在此为盲孔或微过孔电连接,通过其最终建立到电子组件1.2的接触。
62.另外的通孔1.16连接在第一层a中延伸的第一接收器导体路径1.1121和第四层f。经由在附图中不可见的导体路径建立到电子组件1.2的电接触。
63.第一接收器线路1.112在第二方向y上相对于第二接收器线路1.122重叠地布置。
64.图8示出了第一标度元件2的平面图。第二标度元件3在图9中同样示出平面图。标度元件2,3具有片状外形,其中,第一标度元件2具有第一直径d1并且第二标度元件3具有第二直径d2。第一直径d1大于第二直径d2(d1》d2)。
65.标度元件2,3分别由基板组成,其在示出的实施例中由环氧树脂制成并且在其上分别布置两个分度线路2.1,2.2;3.1,3.2。分度线路2.1,2.2;3.1,3.2设计为环形的并且相对于轴线r以不同的直径同心地布置在基板上。分度线路2.1,2.2;3.1,3.2包括分度结构,该分度结构由分别交替布置的能导电的分度区域2.11,2.21;3.11,3.21和不能导电的分度区域2.12,2.22;3.12,3.22组成的周期性队列形成。在所示的实例中将铜作为能导电的分度区域2.11,2.21;3.11,3.21的材料安装在基板上。相反,在不能导电的分度区域2.12,2.22;3.12,3.22中,基板不镀层。通过分别具有两个分度线路2.1,2.2;3.1,3.2的布置能够分别绝对地确定标度元件2,3的角度位置。第一标度元件2的最外的分度线路2.2沿着周向方向具有最大数量的分度区域2.21,2.22,从而通过其能实现有关角度位置的测量的最大解析度。
66.在根据图1的组装状态中,扫描元件1和标度元件2,3分别以轴向间距或者气隙相
对置,从而在标度元件2,3与扫描元件1之间有相对转动的情况下在接收器导体路径1.1121,1.1141,1.1221,1.1241中能通过感应效应分别生成取决于相应的角度位置的信号。形成相应的信号的前提条件是,激励导体路径1.1111,1.1131,1.1151,1.1211,1.1231,1.1251生成相应扫描的分度结构的区域中的、时间上交替的电磁激励场。在所示的实施例中,激励导体路径1.1111,1.1131,1.1151,1.1211,1.1231,1.1251构造为多个以平面平行的载流的单独导体路径。扫描元件1具有带电子组件1.2的电路,其经由层e和f相互电连接。电路例如还能包括asic(专用集成电路)模块。扫描元件1的该电路不仅作为评估元件工作,还作为激励控制元件工作,在其控制下生成激励电流,激励电流随后流过激励导体路径1.1111,1.1131,1.1151,1.1211,1.1231,1.1251。因此,激励导体路径1.1111,1.1131,1.1151,1.1211,1.1231,1.1251通过某个或同一个激励控制元件通电。在此,第一激励器线路1.111和第二激励器线路1.121电串联连接。
67.如果激励器线路1.111,1.113,1.115,1.121,1.123,1.125通电,那么围绕激励导体路径1.1111,1.1131,1.1151,1.1211,1.1231,1.1251形成管状或圆柱形取向的电磁场。合成的电磁场的场线围绕激励器线路1.111,1.113,1.115,1.121,1.123,1.125延伸,其中,场线的方向以已知的类型和方式取决于激励导体路径1.1111,1.1131,1.1151,1.1211,1.1231,1.1251中的电流方向。在能导电的分度区域2.11,2.21;3.11,3.21的区域中感应出涡流,从而分别实现场的取决于角度位置的调制。相应地,能够通过接收器线路1.112,1.114,1.122,1.124分别测量相对的角度位置。接收器导体路径1.1121,1.1141,1.1221,1.1241组成的对在其接收器线路1.112,1.114,1.122,1.124内布置为,使其分别提供相位错开90
°
的信号,从而还能确定转动方向。由接收器线路1.112,1.114,1.122,1.124生成的信号借助于形成评估元件的一些电子组件1.2被进一步处理。
68.通过第一屏蔽元件1.13和第二屏蔽元件1.14能够在测量精度方面尽可能避免两个检测器单元1.11,1.12的负面影响。特别地,避免了不允许的大量的串扰信号,同时也避免了激励场的过大的衰减。此外,通过电子组件或外部源抑制检测器单元1.11,1.12的电磁干扰。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。