1.本技术涉及通信技术领域,尤其涉及一种通信信号的频偏确定方法及装置。
背景技术:
2.当前正交频分复用(orthogonal frequency division multiplexing,ofdm)系统中成熟的频谱估计算法大多将通信信号的多普勒频偏视为恒定值,而在蜂窝高速移动场景和星地融合场景这类高动态场景下,多普勒频偏具有快速时变性。为了在高动态场景下得到更精确的频偏估计值,不仅需要估计接收信号的载波频率,还需要估计接收信号的频偏变化率。
3.目前ofdm系统中对多普勒频偏变化率估计的关注度不高,有二阶差分(second order difference,sod)算法、多普勒频偏联合其一阶变化率的最大似然估计(maximum likelihood,ml)算法和基于第五代移动通信(the 5th generation mobile communication,5g)主同步信号(primary synchronization signal,pss)的一阶频偏变化率估计算法三种算法。
4.sod算法基于同一ofdm符号做频偏变化率估计,频偏在一个ofdm符号内的变化非常细微,因此sod算法的估计精度较低。ml算法的精度依赖于区间长度和步长大小,并且算法复杂度高。基于pss的频谱变化率估计算法提升了估计精度,但仍然达不到10-8
这个量级。
技术实现要素:
5.针对现有技术存在的上述问题,本技术提供一种通信信号的频偏确定方法及装置。
6.第一方面,本技术提供一种通信信号的频偏确定方法,包括:
7.基于跟踪参考信号trs确定通信信号的频偏变化率估计值;
8.基于所述频偏变化率估计值确定所述通信信号的频偏估计值。
9.可选地,所述基于跟踪参考信号trs确定通信信号的频偏变化率估计值,包括:
10.对第一接收trs信号的第一接收序列和所述第一接收trs信号对应的第一发送序列进行共轭相关处理,获取第一序列;
11.对第二接收trs信号的第二接收序列和所述第二接收trs信号对应的第二发送序列进行共轭相关处理,获取第二序列;
12.基于所述第一序列和所述第二序列确定第一频偏变化率估计值;
13.所述第一接收trs信号和所述第二接收trs信号位于相邻帧中的相同位置,所述第一接收序列和所述第二接收序列不同。
14.可选地,所述基于所述第一序列和所述第二序列确定第一频偏变化率估计值,包括:
15.对所述第一序列和所述第二序列进行共轭相关处理,获得第三序列;
16.对所述第三序列中的前n/2项和所述第三序列中的后n/2项进行共轭相关处理,确
定所述第一频偏变化率估计值,n为正整数。
17.可选地,所述获得第三序列之后,还包括:
18.基于所述第三序列的相位信息构造第一损失函数;
19.通过最小二乘法对所述第一损失函数的回归系数进行求解,确定第二频偏变化率估计值。
20.可选地,所述基于所述第三序列的相位信息构造第一损失函数满足如下计算公式:
[0021][0022]
其中,j1表示所述第一损失函数,n表示快速傅里叶变换点数,a表示回归系数矩阵,s表示自变量矩阵,d(n)表示所述第三序列,l表示所述第一接收trs信号和所述第二接收trs信号之间的采样点数,α表示一阶频偏变化率,表示所述第一接收trs信号和所述第二接收trs信号的相位差。
[0023]
可选地,所述确定第二频偏变化率估计值之后,还包括:
[0024]
基于所述第一接收trs信号和所述第二接收trs信号的幅度设置权值,更新所述第一损失函数为第二损失函数;
[0025]
通过最小二乘法对所述第二损失函数的回归系数进行求解,确定第三频偏变化率估计值。
[0026]
可选地,所述基于所述第一接收trs信号和所述第二接收trs信号的幅度设置权值,满足如下计算公式:
[0027][0028]
其中,wn表示所述权值,y(l
s-1
,n)表示所述第一接收trs信号的第一接收序列,y(ls,n)表示所述第二接收trs信号的第二接收序列,l
s-1
表示s-1时刻的第l个正交频分复用符号,ls表示s时刻的第l个正交频分复用符号,n表示快速傅里叶变换点数。
[0029]
可选地,所述第三频偏变化率估计值满足如下计算公式:
[0030][0031]
其中,表示所述第三频偏变化率估计值,n表示快速傅里叶变换点数,wn表示所述权值,d(n)表示所述第三序列。
[0032]
第二方面,本技术还提供一种通信信号的频偏确定装置,包括:
[0033]
第一确定模块,用于基于跟踪参考信号trs确定通信信号的频偏变化率估计值;
[0034]
第二确定模块,用于基于所述频偏变化率估计值确定所述通信信号的频偏估计值。
[0035]
第三方面,本技术还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如第一方面所述任一种通信信号的频偏确定方法的步骤。
[0036]
本技术还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述任一种通信信号的频偏确定方法的步骤。
[0037]
本技术还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如第一方面所述任一种通信信号的频偏确定方法的步骤。
[0038]
本技术实施例提供的通信信号的频偏确定方法及装置,通过trs信号确定频偏变化率估计值,然后根据频偏变化率估计值确定频偏估计值,以便于精确地跟踪通信信号的频偏,提高载波频率精度。
附图说明
[0039]
为了更清楚地说明本技术或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以基于这些附图获得其他的附图。
[0040]
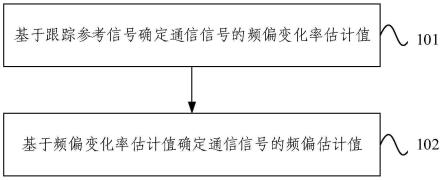
图1是本技术实施例提供的通信信号的频偏确定方法的流程示意图之一;
[0041]
图2是本技术实施例提供的trs在时频资源格上的位置示意图;
[0042]
图3是本技术实施例提供的不同算法在不同信噪比下的性能对比示意图之一;
[0043]
图4是本技术实施例提供的不同算法在不同信噪比下的性能对比示意图之二;
[0044]
图5是本技术实施例提供的基于变化率的频偏确定方法和传统静态频偏确定方法的频偏跟踪性能的对比示意图;
[0045]
图6是本技术实施例提供的通信信号的频偏确定装置的结构示意图;
[0046]
图7是本技术实施例提供的电子设备的结构示意图。
具体实施方式
[0047]
为了更好地对本技术实施例中的技术方案进行描述,下面对相关知识进行介绍。
[0048]
(1)多普勒频偏
[0049]
多普勒频偏(doppler shift)是指当移动台以恒定的速率沿某一方向移动时,由于传播路程差的原因,会造成相位和频率的变化,通常将这种变化称为多普勒频偏。
[0050]
(2)蜂窝高速移动场景和星地融合场景下的多普勒频偏
[0051]
在蜂窝高速移动场景和星地融合场景下,通信信号的多普勒频偏不仅大,而且具有变化率。如表1所示,以低轨卫星场景为例,表1中给出了低轨卫星场景下不同高度、载波频率下最大多普勒频偏和最大多普勒频偏变化率参考值。
[0052]
表1:低轨卫星场景下的多普勒频偏及其变化率
[0053][0054][0055]
星地融合通信沿用了地面蜂窝通信中的ofdm系统,对频率偏移非常敏感,小数倍频偏会破坏子载波之间的正交性,造成子载波间的干扰,严重降低系统性能;整数倍频偏不会引起子载波间的干扰,但是会导致接收端恢复的频域数据码元序列循环位移,使得系统的误比特率升高。
[0056]
当前ofdm系统中成熟的频偏估计算法大多都是将通信信号的频偏视为恒定值,这类算法在静止或低动态的场景下较为适用。而在蜂窝高速移动场景和星地融合场景这类高动态场景中,频偏具有时变性,因此,为了在高动态场景下得到更精确的频偏估计值,不仅需要估计接收信号的载波频率,还需要估计接收信号的频偏变化率,以便于精确地跟踪通信信号的频偏、提高载波频率精度。
[0057]
目前ofdm系统中对多普勒频偏变化率估计的关注度不高,有sod算法、ml算法和基于pss的频偏变化率估计算法三种算法。
[0058]
(3)归一化频偏变化率
[0059]
归一化频偏变化率α可以表示为如下公式:
[0060][0061]
其中,α表示相邻采样点之间的多普勒频偏数值相对于子载波间隔的归一化,δf
doppler
表示每秒内多普勒频率的变化数值,ts表示采样间隔,δf
subcarrier
表示子载波间隔。
[0062]
(4)sod算法
[0063]
sod算法通过两次差分,从循环前缀中提取出相位,算法如下:
[0064]
令y(n)为接收ofdm符号循环前缀中的信号,其对应于ofdm符号后半部分接收信号中的y(n n),则y(n)和y(n n)可以表示为如下公式:
[0065][0066][0067]
其中,n表示fft点数,表示初始相位,ε0表示初始频偏。对y(n)和y(n n)做共轭
相关运算后再做移位共轭相关,满足如下公式:
[0068][0069]
其中,q为实数,n
cp
表示循环前缀长度,最终分离出一阶频偏变化率估计值表示为如下公式:
[0070][0071]
(5)ml算法
[0072]
定义i和i
′
,分别表示第l个符号的循环前缀和第l个符号后n
cp
个数据,i和i
′
分别表示为如下计算公式:
[0073]
i={0,1,...,n
cp-1}
[0074]i′
={n,n 1...,n n
cp-1}
[0075]
则ofdm符号中采样点的特征满足如下计算公式:
[0076][0077]
最大似然函数可以被构造为满足如下计算公式:
[0078][0079]
由于∏nf(x(n))不受ε0和α影响,因此上式可以被转化为如下计算公式:
[0080][0081]
其中,f(x(n),x(n n))为二维的复高斯分布概率密度函数,满足如下计算公式:
[0082][0083]
其中,ρ为x(n)与x(n n)的相关表示,满足如下计算公式:
[0084][0085]
可以得到|ρ|满足如下计算公式:
[0086][0087]
f(x(n))和f(x(n n))均为一维高斯分布,分别表示为如下计算公式:
[0088][0089][0090]
因此,将以上一维高斯分布与二维高斯分布代入λ(ε0,α),可以得到如下计算公式:
[0091][0092]
去掉上式中与ε0和α独立的分量,最大似然函数可以简化为如下计算公式:
[0093][0094]
因此,使最大似然函数最大化即可得到α的估计值以及ε0的估计值分别满足
如下计算公式:
[0095][0096][0097]
(6)基于pss的频偏变化率估计算法
[0098]
假设在同一个ofdm符号上多普勒频偏视作不变,利用两个相邻且间隔为5ms的pss信号获取频偏变化率。
[0099]
令相邻两个pss接收信号y
m-1
(n)和ym(n)表示分别表示为如下计算公式:
[0100][0101][0102]
其中,ε
m-1
和分别表示前一个pss的频偏和初始相位,εm和分别表示后一个pss的频偏和初始相位。εm和ε
m-1
之间的关系满足如下计算公式:
[0103]
εm=ε
m-1
αl
[0104]
其中,l表示相邻两个pss的采样点数。将相邻pss进行共轭相关处理,满足如下计算公式:
[0105][0106]
将r(n)的前后半段共轭相关得到如下计算公式:
[0107][0108]
最终可以求得频偏变化率估计值满足如下公式:
[0109][0110]
(7)三种不同算法的对比
[0111]
以表1中多普勒频偏变化率为8.16khz/s的情况为例,假设子载波间隔为15khz,子载波数目为1024,基于归一化频偏变化率的计算公式确定归一化频偏变化率如下:
[0112][0113]
归一化频偏变化率为3.5
×
10-8
,即相邻采样点间频率变化数值为子载波间隔的3.5
×
10-8
倍,
[0114]
①
sod算法是基于同一ofdm符号中循环前缀和数据部分之间的频率变化来设计算法的,假设归一化频偏变化率为3.5
×
10-8
,那么在同一ofdm符号内相邻采样点之间的归一化频率变化为3.5
×
10-8
,频偏在一个ofdm符号内的变化非常细微,因此sod算法的计算精度较低。在一次仿真中设置归一化频偏变化率量级为10-1
,假设归一化频偏变化率为0.1,子载波间隔为2232hz,子载波数目为4096,则频偏变化率的值约为2.04ghz/s,与表1中示出的频偏变化率不相符。
[0115]
②
ml算法是在一定的区间内,设置步长来搜索最佳的频偏变化率估计值,算法复杂度高,且计算结果与设置的区间的长度、步长的大小相关联。
[0116]
③
基于pss的频偏变化率估计算法通过在更大的时间尺度上累积频偏变化率对参考信号相位的影响,使其对小范围的频偏变化率更加敏感,提高了频偏变化率的估计精度,但是仍然达不到10-8
的量级。
[0117]
针对现有技术存在的上述问题,本技术实施例提供一种通信信号的频偏确定方法及装置,利用trs信号来估计频偏变化率,进一步估计频偏,降低算法复杂度的同时提升频偏估计精度。
[0118]
为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术中的附图,对本技术中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0119]
图1是本技术实施例提供的通信信号的频偏确定方法的流程示意图之一,如图1所示,本技术实施例提供一种通信信号的频偏确定方法,执行主体为用于通信信号的频偏确定的装置,该方法至少包括以下步骤:
[0120]
步骤101、基于跟踪参考信号确定通信信号的频偏变化率估计值。
[0121]
具体地,终端在配置的时候会在相应的时频位置去测量信道状态信息参考信号(channel state information-reference signal,csi-rs),获取信道状态信息。用于时频跟踪的csi-rs信号经过特殊配置,被称作跟踪参考信号(tracing reference signal,trs)。trs是一种多周期的csi-rs。
[0122]
当终端处于空闲状态或初始状态时,使用主同步信号(primary synchronization signal,pss)和辅同步信号(secondary synchronization signal,sss)实现时频同步,在无线资源控制(radio resource control,rrc)连接建立后,对终端配置trs,用于跟踪阶段
的时频同步。
[0123]
图2是本技术实施例提供的trs在时频资源格上的位置示意图,如图2所示,在时间维度,一个时隙(slot)内包含两个trs,在一个时隙内两个trs间隔是4个ofdm符号,频域上间隔4个子载波,trs的发送周期为2ux
p
slot,其中,u为子载波间隔配置,u∈{0,1,2,3,4},x
p
∈{10,20,40,80}。
[0124]
在频率维度,trs所占带宽为密度为3,其中,rb表示资源块(resource block,rb),bwp表示带宽部分(bandwidth part,bwp),表示bwpi所包括的rb的数目。
[0125]
本技术实施例中通过trs信号来确定通信信号的频偏变化率估计值。
[0126]
步骤102、基于频偏变化率估计值确定通信信号的频偏估计值。
[0127]
具体地,为了在高动态场景下得到更精确的频偏估计值,不仅需要估计接收信号的载波频率,还需要估计接收信号的频偏变化率,以便于精确地跟踪通信信号的频偏,提高载波频率精度。
[0128]
第l个ofdm符号第n个子载波上的多普勒频偏估计值ε(l,n)满足如下计算公式:
[0129][0130]
其中,n
sym
表示ofdm符号长度,n
cp
表示循环前缀长度,ε0表示初始频偏,α表示归一化频偏变化率估计值,表示初始相位。
[0131]
第l个ofdm符号第n个子载波上的时域接收trs信号的接收序列y(l,n)的表达式如下:
[0132][0133]
其中,n表示快速傅里叶变换(fast fourier transform,fft)的点数,h(k)表示信道频域响应值,x(l,k)表示与接收trs信号相对应的频域发送信号的发送序列,ε(l,n)表示频偏。相对应地,与接收trs信号相对应的本地时域发送信号的发送序列x(l,n)的表达式如下:
[0134][0135]
其中,n表示fft点数,x(l,k)表示与接收trs信号相对应的频域发送信号的发送序列。
[0136]
本技术实施例提供的通信信号的频偏确定方法,通过trs信号确定频偏变化率估计值,然后根据频偏变化率估计值确定频偏估计值,以便于精确地跟踪通信信号的频偏,提高载波频率精度。
[0137]
可选地,基于trs信号确定通信信号的频偏变化率估计值,包括:
[0138]
对第一接收trs信号的第一接收序列和第一接收trs信号对应的第一发送序列进行共轭相关处理,获取第一序列;
[0139]
对第二接收trs信号的第二接收序列和第二接收trs信号对应的第二发送序列进行共轭相关处理,获取第二序列;
[0140]
基于第一序列和第二序列确定第一频偏变化率估计值;
[0141]
第一接收trs信号和第二接收trs信号位于相邻帧中的相同位置,第一接收序列和第二接收序列不同。
[0142]
具体地,在5g帧结构中利用相邻帧中相同位置的trs信号来确定频偏变化率估计值。
[0143]
可选地,增大时间尺度,在当前帧中联合前一帧中对应位置的trs信号来确定频偏变化率,例如trs的发送周期为10ms。
[0144]
第一接收trs信号为当前帧中的接收trs信号,第二接收trs信号为相邻帧中相同位置的接收trs信号,相邻帧中对应位置的trs信号的序列不同,即第一接收序列和第二接收序列不同。
[0145]
当前帧中第一接收trs信号的第一接收序列y(l
s-1
,n)的表达式如下:
[0146][0147]
其中,n表示fft点数,h(k)表示信道频域响应值,x(l,k)表示与第一接收trs信号相对应的频域发送信号的发送序列,ε
s-1
表示s-1时刻第一接收trs信号的频偏,表示s-1时刻第一接收trs信号的初始相位。
[0148]
前一帧中相同位置的第二接收trs信号的第二接收序列y(ls,n)的表达式如下:
[0149][0150]
其中,n表示fft点数,h(k)表示信道频域响应值,x(l,k)表示与第二接收trs信号相对应的频域发送信号的发送序列,εs表示s时刻第二接收trs信号的频偏,表示s时刻第二接收trs信号的初始相位。
[0151]
第一接收trs信号和第二接收trs信号的频偏之间满足如下计算公式:
[0152]
εs=ε
s-1
αl
[0153]
其中,α表示一阶频偏变化率,l表示第一接收trs信号和第二接收trs信号之间的采样点数。
[0154]
对第一接收trs信号的第一接收序列y(l
s-1
,n)和第一接收trs信号对应的第一发送序列x(l
s-1
,n)进行共轭相关处理,获取第一序列x1,满足如下计算公式:
[0155]
x1=x
*
(l
s-1
,n)y(l
s-1
,n)
[0156]
对第二接收trs信号的第二接收序列y(ls,n)和第二接收trs信号对应的第二发送序列x(ls,n)进行共轭相关处理,获取第二序列x2,满足如下计算公式:
[0157]
x2=x
*
(ls,n)y(ls,n)
[0158]
将第一接收trs信号的第一接收序列和第一接收trs信号对应的第一发送序列做
共轭相关得到第一序列,将第二接收trs信号的第二接收序列和第二接收trs信号对应的第二发送序列做共轭相关得到第二序列之后,对得到的第一序列和第二序列进行处理,确定第一频偏变化率估计值。
[0159]
可选地,基于第一序列和第二序列确定第一频偏变化率估计值,包括:
[0160]
对第一序列和第二序列进行共轭相关处理,获得第三序列;
[0161]
对第三序列中的前n/2项和第三序列中的后n/2项进行共轭相关处理,确定第一频偏变化率估计值,n为正整数。
[0162]
具体地,本技术实施例提供一种基于trs共轭相关的频偏变化率估计算法(trs共轭相关算法),具体包括:
[0163]
获取第一序列x1和第二序列x2之后,将第一序列和第二序列做共轭相关,得到第三序列d(n),满足如下计算公式:
[0164][0165]
其中,c为实数。
[0166]
对第三序列d(n)的前n/2项和第三序列中的后n/2项进行共轭相关处理,满足如下计算公式:
[0167][0168]
其中,c
′
为实数,n为正整数。
[0169]
进一步地,确定第一频偏变化率估计值的表达式如下:
[0170][0171]
本技术实施例提供的通信信号的频偏确定方法,利用5g帧结构中相邻帧中相同位置的trs信号,通过对第一trs接收信号的第一接收序列和对应的第一发送序列共轭相关得到第一序列,通过对第二trs接收信号的第二接收序列和对应的第二发送序列共轭相关得到第二序列之后,将第一序列和第二序列共轭相关得到第三序列,对第三序列的前后半段共轭相关,获得第一频偏变化率估计值,降低了频偏变化率估计过程的计算复杂度,同时提
升了计算精度。
[0172]
可选地,获得第三序列之后,还包括:
[0173]
基于第三序列的相位信息构造第一损失函数;
[0174]
通过最小二乘法对第一损失函数的回归系数进行求解,确定第二频偏变化率估计值。
[0175]
具体地,最小二乘法(least squares method,ls)通过最小化误差的平方和寻找数据的最佳函数匹配。利用第三序列的相位信息构造第一损失函数,然后通过最小二乘法对第一损失函数的回归系数进行优化求解,确定第二频偏变化率估计值。
[0176]
最小二乘法的原理如下:假设自变量矩阵设自变量矩阵s中包含u个输入的特征向量,第i个特征向量的表达式如下:
[0177]
s(i)=[1 s
i,1 s
i,2 ... s
i,(p-1)
]
t
,p=1,2,3,
…
,u
[0178]
其中,上标t表示转置。相对应地,自变量矩阵s的表达式如下:
[0179][0180]
特征向量中每个元素对应一个回归系数,系数矩阵a的表达式如下:
[0181]
a=[a
0 a
1 a
2 ... a
p-1
]
t
[0182]
第i个输入特征向量对应因变量矩阵υ中第i个因变量γ(i),因变量矩阵υ的表达式如下:
[0183]
υ=[γ
(1) γ
(2) γ
(3) ... γ
(u-1)
]
t
[0184]
应因变量矩阵υ、自变量矩阵s和系数矩阵a之间存在线性关系,表达式如下:
[0185]
υ=sa
[0186]
最小二乘法的最终目的是求解出回归系数矩阵a,使得损失函数取最小值。系统损失函数j的表达式如下:
[0187][0188]
使得损失函数j取最小值的回归系数矩阵a即为求解得到的回归系数a的估计值。因此损失函数j为关于a的函数,其表达式如下:
[0189]
j=f(a0,a1,a2,...,a
p-1
)
[0190]
本技术实施例提供一种基于最小二乘法的频偏变化率估计算法(ls算法),具体包括:
[0191]
将最小二乘法应用到频偏变化率的估计过程中,利用第三序列的相位信息构造第一损失函数,然后通过最小二乘法对第一损失函数的回归系数进行优化求解,确定第二频偏变化率估计值。第三序列d(n)的表达式如下:
[0192][0193]
其中,c为实数,n∈{0,1,...n-1},因此可以利用第三序列的相位构造线性方程如下:
[0194][0195]
将α和作为回归系数,将和d
l,n
=arg{d(n)}作为观测值,可以得到因变量矩阵γ的表达式如下:
[0196]
γ=[d
l,0 d
l,1 d
l,2 ... d
l,n-1
]
t
[0197]
自变量矩阵s的表达式如下:
[0198][0199]
回归系数矩阵a的表达式如下:
[0200][0201]
因此,第一损失函数的表达式如下:
[0202][0203]
其中,j1表示第一损失函数,n表示fft点数,a表示回归系数矩阵,s表示自变量矩阵,d(n)表示第三序列,l表示第一接收trs信号和第二接收trs信号之间的采样点数,α表示一阶频偏变化率,表示第一接收trs信号和第二接收trs信号的相位。
[0204]
要使第一损失函数达到最小,分别令第一损失函数j1关于α和求导的结果为0,满足如下计算公式:
[0205][0206]
令
[0207][0208]
解得第二频偏变化率估计值的表达式如下:
[0209][0210]
其中,表示第二频偏变化率估计值,n表示fft点数,d(n)表示第三序列,l表示第一接收trs信号和第二接收trs信号之间的采样点数。
[0211]
本技术实施例提供的通信信号的频偏确定方法,通过trs共轭相关算法得到第三序列后,利用第三序列的相位构造线性方程,通过最小二乘法求解出第二频偏变化率估计值,进一步提升了频偏确定过程中频偏变化率估计的计算精度。
[0212]
可选地,确定第二频偏变化率估计值之后,还包括:
[0213]
基于第一接收trs信号和第二接收trs信号的幅度设置权值,更新第一损失函数为第二损失函数;
[0214]
通过最小二乘法对第二损失函数的回归系数进行求解,确定第三频偏变化率估计值。
[0215]
具体地,本技术实施例提供一种基于加权最小二乘法的频偏变化率估计算法(weighted-ls算法),具体包括:
[0216]
在通过最小二乘法求解出第二频偏变化率估计值之后,考虑到噪声对通信信号的影响,可以根据接收trs信号的幅度信息设置权值(weighted),根据第一接收trs信号和第二接收trs信号的幅度平方和获得加权最小二乘的权值,进一步提升频偏变化率估计值的估计精度。
[0217]
权值wn满足如下计算公式:
[0218][0219]
其中,n表示fft点数。
[0220]
基于第一接收trs信号的第二接收trs信号的幅度信息设置权值wn,满足如下计算公式:
[0221][0222]
其中,wn表示权值,y(l
s-1
,n)表示第一接收trs信号的第一接收序列,y(ls,n)表示第二接收trs信号的第二接收序列,l
s-1
表示s-1时刻的第l个ofdm,ls表示s时刻的第l个正交频分复用符号,n表示fft点数。
[0223]
在这种情况下,更新第一损失函数为第二损失函数,第二损失函数满足如下计算公式:
[0224][0225]
其中,j2表示第二损失函数,n表示fft点数,l表示第一接收trs信号和第二接收trs信号之间的采样点数,α表示一阶频偏变化率,表示第一接收trs信号和第二接收trs信号的相位差,d(n)表示第三序列。
[0226]
要使第二损失函数达到最小,分别令第二损失函数j2关于α和求导的结果为0,求解得到第三频偏变化率估计值满足如下计算公式:
[0227][0228]
其中,表示所述第三频偏变化率估计值,n表示fft点数,wn表示权值,d(n)表示第三序列。
[0229]
本技术实施例提供的通信信号的频偏确定方法,通过相邻接收帧中trs信号幅度平方和获得加权最小二乘的权值,进一步提升了频偏确定过程中频偏变化率估计的计算精度。
[0230]
下面对本技术实施例提出的通信信号的频偏确定方法的估计精度进行分析说明,图3是本技术实施例提供的不同算法在不同信噪比下的性能对比示意图之一,如图3所示,本技术实施例对比了在高斯加性白噪声(additive white gaussian noise,awgn)信道下sod算法、基于pss的频偏变化率估计算法(pss共轭相关算法)、基于trs共轭相关的频偏变化率估计算法(trs共轭相关算法)、基于最小二乘法的频偏变化率估计算法(ls算法)、基于加权最小二乘法的频偏变化率估计算法(weighted-ls算法)的性能,以均方误差(mean squared error,mse)作为评价指标,横坐标表示信噪比,其单位为db,纵坐标为mse。
[0231]
mse满足如下计算公式:
[0232][0233]
其中,tti表示仿真次数,表示每一次仿真获得的归一化频偏变化率估计值,α表示归一化频偏变化率真实值。仿真参数如表2所示。
[0234]
表2:仿真参数
[0235]
[0236][0237]
从图3中可以看出,在awgn信道下,随着信噪比的增大,各算法的性能均有所提升。其中,sod算法的算法性能非常差,精度远达不到1
×
10-8
。pss共轭相关算法通过在更大的时间尺度上累积多普勒频偏变化率对参考信号相位的影响,但性能表现仍然较差。
[0238]
进一步地,对trs共轭相关算法、ls算法和weighted-ls算法的性能示意图在纵坐标上进行放大。可以看出,本技术实施例提供的三种频偏变化率估计算法在低信噪比下mse均能达到10-1
。当mse达到10-16
时,weighted-ls算法的性能优于ls算法4db,ls算法的性能优于trs共轭相关算法2db。
[0239]
图4是本技术实施例提供的不同算法在不同信噪比下的性能对比示意图之二,如图4所示,本技术实施例对比了在衰落信道下sod算法、基于pss的频偏变化率估计算法(pss共轭相关算法)、基于trs共轭相关的频偏变化率估计算法(trs共轭相关算法)、基于最小二乘法的频偏变化率估计算法(ls算法)、基于加权最小二乘法的频偏变化率估计算法(weighted-ls算法)的性能,以mse作为评价指标,横坐标表示信噪比,其单位为db,纵坐标为mse。仿真参数如表2所示。
[0240]
从图4中可以看出,在衰落信道下,随着信噪比的增大,各算法的性能均有所提升。在mse达到10-16
时,trs共轭相关算法的信噪比为14db,相较于awgn信道下mse达到10-1
时的信噪比高出4db。
[0241]
当mse达到10-16
时,weighted-ls算法的性能优于ls算法2db,ls算法的性能优于trs共轭相关算法2db。
[0242]
图5是本技术实施例提供的基于变化率的频偏确定方法和传统静态频偏确定方法的频偏跟踪性能的对比示意图,如图5所示,横坐标表示时间(time),其单位为毫秒(ms),纵坐标为归一化频偏。在基于变化率的频偏确定方法中,用于跟踪频偏变化率取值为衰落信道下weighted-ls算法在信噪比为14db时的平均频偏变化率估计值。
[0243]
从图5中可以看出,在频偏具有时变性的高动态通信场景下,使用传统静态频偏确定方法将导致频偏估计误差随时间的变化而不断增大;使用基于频偏变化率的频偏确定方法能够不断跟踪时变性频偏,在高动态通信场景下更为适用。
[0244]
下面对本技术实施例提出的通信信号的频偏确定方法的算法复杂度进行分析说明,1次复数乘法相当于4次实数乘法和2次加法,1次复数加法相当于2次实数加法。算法复杂度如表3所示,trs共轭相关算法的计算复杂度最低,ls算法的复杂度相对有所提高,而weighted-ls算法中进一步提高了算法的复杂度。可以看出,提升频偏变化率估计值的精度牺牲了算法的复杂度。
[0245]
表3:算法复杂度
[0246][0247]
下面对本技术提供的通信信号的频偏确定装置进行描述,下文描述的通信信号的频偏确定装置与上文描述的通信信号的频偏确定方法可相互对应参照。
[0248]
图6是本技术实施例提供的通信信号的频偏确定装置的结构示意图,如图6所示,本技术实施例提供一种通信信号的频偏确定装置,该装置包括:
[0249]
第一确定模块601,用于基于跟踪参考信号trs确定通信信号的频偏变化率估计值;
[0250]
第二确定模块602,用于基于所述频偏变化率估计值确定所述通信信号的频偏估计值。
[0251]
可选地,所述第一确定模块还用于:
[0252]
对第一接收trs信号的第一接收序列和所述第一接收trs信号对应的第一发送序列进行共轭相关处理,获取第一序列;
[0253]
对第二接收trs信号的第二接收序列和所述第二接收trs信号对应的第二发送序列进行共轭相关处理,获取第二序列;
[0254]
基于所述第一序列和所述第二序列确定第一频偏变化率估计值;
[0255]
所述第一接收trs信号和所述第二接收trs信号位于相邻帧中的相同位置,所述第一接收序列和所述第二接收序列不同。
[0256]
可选地,所述基于所述第一序列和所述第二序列确定第一频偏变化率估计值,包括:
[0257]
对所述第一序列和所述第二序列进行共轭相关处理,获得第三序列;
[0258]
对所述第三序列中的前n/2项和所述第三序列中的后n/2项进行共轭相关处理,确定所述第一频偏变化率估计值,n为正整数。
[0259]
可选地,所述获得第三序列之后,还包括:
[0260]
基于所述第三序列的相位信息构造第一损失函数;
[0261]
通过最小二乘法对所述第一损失函数的回归系数进行求解,确定第二频偏变化率估计值。
[0262]
可选地,所述基于所述第三序列的相位信息构造第一损失函数满足如下计算公式:
[0263][0264]
其中,j1表示所述第一损失函数,n表示快速傅里叶变换点数,a表示回归系数矩阵,s表示自变量矩阵,d(n)表示所述第三序列,l表示所述第一接收trs信号和所述第二接收trs信号之间的采样点数,α表示一阶频偏变化率,表示所述第一接收trs信号和所述第二接收trs信号的相位差。
[0265]
可选地,所述确定第二频偏变化率估计值之后,还包括:
[0266]
基于所述第一接收trs信号和所述第二接收trs信号的幅度设置权值,更新所述第一损失函数为第二损失函数;
[0267]
通过最小二乘法对所述第二损失函数的回归系数进行求解,确定第三频偏变化率估计值。
[0268]
可选地,所述基于所述第一接收trs信号和所述第二接收trs信号的幅度设置权值,满足如下计算公式:
[0269][0270]
其中,wn表示所述权值,y(l
s-1
,n)表示所述第一接收trs信号的第一接收序列,y(ls,n)表示所述第二接收trs信号的第二接收序列,l
s-1
表示s-1时刻的第l个正交频分复用符号,ls表示s时刻的第l个正交频分复用符号,n表示快速傅里叶变换点数。
[0271]
可选地,所述第三频偏变化率估计值满足如下计算公式:
[0272][0273]
其中,表示所述第三频偏变化率估计值,n表示快速傅里叶变换点数,wn表示所述权值,d(n)表示所述第三序列。
[0274]
在此需要说明的是,本技术实施例提供的上述装置,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0275]
图7是本技术实施例提供的电子设备的结构示意图,如图7所示,该电子设备可以包括:处理器(processor)701、通信接口(communications interface)702、存储器(memory)703和通信总线704,其中,处理器701,通信接口702,存储器703通过通信总线704完成相互间的通信。处理器701可以调用存储器703中的逻辑指令,以执行通信信号的频偏确定方法,该方法包括:
[0276]
基于跟踪参考信号trs确定通信信号的频偏变化率估计值;
[0277]
基于所述频偏变化率估计值确定所述通信信号的频偏估计值。
[0278]
此外,上述的存储器703中的逻辑指令可以通过软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
[0279]
另一方面,本技术还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,计算机程序可存储在非暂态计算机可读存储介质上,所述计算机程序被处理器执行时,计算机能够执行上述各方法所提供的通信信号的频偏确定方法,该方法包括:
[0280]
基于跟踪参考信号trs确定通信信号的频偏变化率估计值;
[0281]
基于所述频偏变化率估计值确定所述通信信号的频偏估计值。
[0282]
又一方面,本技术还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各方法提供的通信信号的频偏确定方法,该方法包括:
[0283]
基于跟踪参考信号trs确定通信信号的频偏变化率估计值;
[0284]
基于所述频偏变化率估计值确定所述通信信号的频偏估计值。
[0285]
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以基于实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
[0286]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
[0287]
最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。