技术特征:
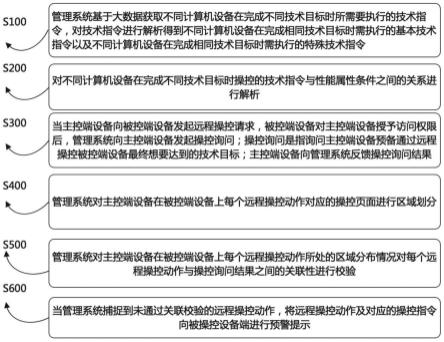
1.基于人工智能的计算机远程控制管理方法,其特征在于,所述管理方法包括:步骤s100:管理系统基于大数据获取不同计算机设备在完成不同技术目标时所需要执行的技术指令,对所述技术指令进行解析得到不同计算机设备在完成相同技术目标时需执行的基本技术指令以及不同计算机设备在完成相同技术目标时需执行的特殊技术指令;步骤s200:对所述不同计算机设备在完成不同技术目标时操控的技术指令与性能属性条件之间的关系进行解析;步骤s300:当主控端设备向被控端设备发起远程操控请求,所述被控端设备对所述主控端设备授予访问权限后,管理系统向所述主控端设备发起操控询问;所述操控询问是指询问所述主控端设备预备通过远程操控所述被控端设备最终想要达到的技术目标;所述主控端设备向所述管理系统反馈操控询问结果;一次所述操控询问反馈得到的所述操控询问结果至少包括一个技术目标;步骤s400:所述管理系统基于主控端设备在被控端设备上每个远程操控动作将对应的操控页面进行区域划分;步骤s500:所述管理系统基于主控端设备在被控端设备上每个远程操控动作所处的区域分布情况对所述每个远程操控动作与操控询问结果之间的关联性进行校验;步骤s600:当所述管理系统捕捉到未通过关联校验的远程操控动作,将所述远程操控动作及对应的操控指令向被操控设备端进行预警提示。2.根据权利要求1所述的基于人工智能的计算机远程控制管理方法,其特征在于,所述步骤s100对不同计算机设备在完成不同技术目标时所需执行的技术指令进行解析的过程包括:步骤s101:提取各技术目标,基于大数据分别获取不同计算机设备处于非远程操控状态下执行所述各技术目标时按照时间顺序发布的技术指令序列;步骤s102:记执行技术目标a时,第i个计算机设备对应需操作的技术指令序列集为x
ai
,所述x
ai
内包括{x
ai1
,x
ai2
,
…
,x
ain
}其中,x
ai1
、x
ai2
、
…
、x
ain
分别表示第i个计算机设备完成技术目标a时对应需操作的第1、2、
…
、n个技术指令;基于所有计算机设备完成技术目标a时对应需执行的技术指令序列集得到执行技术目标a时所需操作的基本技术指令集x
a基本
=x
ai
∩x
ai 1
∩x
ai 2
∩
…
∩x
ai m
;即x
a基本
内的各技术指令为第i、i 1、i 2、
…
、i m个计算机设备执行技术目标a时对应需操作的出现重合的技术指令;步骤s103:分别将不同计算机设备在执行技术目标a时需操作的技术指令序列集减去所有计算机设备在执行技术目标a时需操作的基本技术指令集得到不同计算机设备在执行技术目标a时需操作的特殊技术指令集;步骤s104:分别将i个计算机设备在执行技术目标a时需操作的技术指令序列集拆分解析得到x
ai
=x
a基本
x
ai特殊
;其中,x
ai特殊
表示第i个计算机设备在执行技术目标a时需操作的特殊技术指令集;x
a基本
表示所有计算机设备在执行技术目标a时需操作的基本技术指令集;步骤s105:分别在所述x
a基本
和所述x
ai特殊
中将必须符合时间顺位的技术指令序列解析出来作为关键指令节点。3.根据权利要求2所述的基于人工智能的计算机远程控制管理方法,其特征在于,对不同计算机设备在完成不同技术目标时操控的技术指令与性能属性条件之间的关系进行解析的过程包括:
步骤s201:分别基于各计算机设备在完成各技术目标时的特殊技术指令集与基本技术指令集对各计算机设备的性能属性条件进行归纳,得到执行各技术目标时对应不同性能属性条件的对应技术指令;步骤s202:对各计算机设备在完成技术目标a时,不同性能属性条件与不同技术指令之间建立指向对应关系,记x
a基本
→
a
→
a和x
特殊
→
b
→
a;a表示某计算机设备在完成技术目标a时执行x
a基本
时对应的性能属性条件集;其中,x
特殊
表示某计算机设备在完成技术目标a时除去x
a基本
以外需执行的特殊技术指令,b表示某计算机设备在完成技术目标a时执行x
特殊
时对应的性能属性条件集。4.根据权利要求1所述的基于人工智能的计算机远程控制管理方法,其特征在于,所述远程操控动作包括鼠标操控动作、触控板操控动作、键盘操控动作;一个技术指令至少对应一个远程操控动作。5.根据权利要求1所述的基于人工智能的计算机远程控制管理方法,其特征在于,所述步骤s400对主控端设备在被控端设备上每个远程操控动作将对应的操控页面进行区域划分的过程包括:步骤s401:提取被控端设备的性能属性条件信息、主控端设备反馈的操控询问结果中包含的技术目标信息;基于所述技术目标信息和被控端设备的性能属性条件信息确定主控端设备需操作的基本技术指令集和特殊技术指令集;步骤s402:捕捉主控端设备在被控端设备上的每一个远程操控动作以及与所述远程操控动作对应的操控页面,基于人工智能得到所述远程操控动作与操控页面之间能产生的所有预计技术指令;将在所述所有的预计技术指令中同所述步骤s401中提取到的基本技术指令集、特殊技术指令集存在重合的技术指令进行标记得到若干个标记指令;步骤s403:将所述所有预计技术指令分别在操控页面中进行对应操控指令区域的划分得到操控指令区域集,所述操控指令区域集内包括若干个操控指令区域;将所述若干个标记指令对应在所述操控指令区域集中进行圈定标记得到第一目标操控区域集,所述第一目标操控区域集内包括若干个第一目标操控区域,一个所述目标操控区域与一个所述标记指令相对应;在所述第一目标操控区域集内将属于关键指令节点所对应的区域作为第二目标操控区域;设位于所述第一目标操控区域以外的操控指令区域为无关区域。6.根据权利要求1所述的基于人工智能的计算机远程控制管理方法,其特征在于,所述步骤s500基于主控端设备在被控端设备上每个远程操控动作所处的区域分布情况对每个远程操控动作与操控询问结果之间的关联性进行校验的过程包括:步骤s501:捕捉每个位于所述无关区域及所述第二目标操控区域内的远程操控动作,若所述远程操控动作在所述无关区域内键入一次指令后,捕捉下一次在所述无关区域内键入的指令,若所述下一次在无关区域内键入的指令并非是取消上一次在无关区域内键入的指令,判定所述主控端设备的远程操控动作与操控询问结果之间关联性校验失败;步骤s502:若所述远程操控动作在所述第二目标操控区域内键入一次指令a1后,捕捉下一次键入指令a2对应的区域位置;若a2的区域位置同属于所述第二目标操控区域内,但在a2的区域位置对应的操控指令与在a1的区域位置对应的操控指令不构成一个关键指令节点,或者在a2的区域位置对应的操控指令与在a1的区域位置对应的操控指令构成一个与所述技术目标信息无关联的关键指令节点,判定所述主控端设备的远程操控动作与操控询
问结果之间关联性校验失败。7.应用于权利要求1-6中任一项的基于人工智能的计算机远程控制管理方法的基于人工智能的计算机远程控制管理系统,其特征在于,所述管理系统包括第一技术指令解析模块、第二技术指令解析模块、询问和反馈接收模块、页面区域划分模块、关联性校验模块、预警提示模块;所述第一技术指令解析模块,用于获取不同计算机设备在完成不同技术目标时所需要执行的技术指令,对所述技术指令进行解析得到不同计算机设备在完成相同技术目标时需执行的基本技术指令以及不同计算机设备在完成相同技术目标时需执行的特殊技术指令;所述第二技术指令解析模块,用于对不同计算机设备在完成不同技术目标时操控的技术指令与性能属性条件之间的关系进行解析;所述询问和反馈接收模块,用于当主控端设备向被控端设备发起远程操控请求且所述被控端设备对所述主控端设备授予访问权限后向所述主控端设备发起操控询问并接收询问反馈;所述页面区域划分模块,用于对主控端设备在被控端设备上每个远程操控动作将对应的操控页面进行区域划分;所述关联性校验模块,用于基于主控端设备在被控端设备上每个远程操控动作所处的区域分布情况对所述每个远程操控动作与操控询问结果之间的关联性进行校验;所述预警提示模块,用于接收所述关联性校验模块中的数据,将未通过关联校验的远程操控动作及对应的操控指令向被操控设备端进行预警提示。8.根据权利要求7所述的基于人工智能的计算机远程控制管理系统,其特征在于,所述第一技术指令解析模块包括基本技术指令解析单元、特殊技术指令解析单元;所述基本技术指令解析单元,用于获取不同计算机设备在完成不同技术目标时所需要执行的技术指令,对所述技术指令进行解析得到不同计算机设备在完成相同技术目标时需执行的基本技术指令;所述特殊技术指令解析单元,用于获取不同计算机设备在完成不同技术目标时所需要执行的技术指令,对所述技术指令进行解析得到不同计算机设备在完成相同技术目标时需执行的特殊技术指令。9.根据权利要求7所述的基于人工智能的计算机远程控制管理系统,其特征在于,所述页面区域划分模块包括:信息采集处理单元、预计技术指令分析单元、区域标记划分单元;所述信息采集处理单元,用于采集被控端设备的性能属性条件信息、主控端设备反馈的操控询问结果中包含的技术目标信息,并基于上述信息确定主控端设备需操作的基本技术指令集和特殊技术指令集;所述预计技术指令分析单元,用于接收所述信息采集处理单元中的数据,捕捉主控端设备在被控端设备上的每一个远程操控动作以及与所述远程操控动作对应的操控页面,基于人工智能得到所述远程操控动作与操控页面之间能产生的所有预计技术指令;所述区域标记划分单元,用于根据所述预计技术指令分析单元中的数据对所述操控页面进行第一目标操控区域、第二目标操控区域、无关区域的标记划分。
技术总结
本发明公开了基于人工智能的计算机远程控制管理系统及方法,管理方法包括:步骤S100:获取不同计算机设备在完成不同技术目标时所需要执行的技术指令,对技术指令进行解析;步骤S200:对不同计算机设备在完成不同技术目标时操控的技术指令与性能属性条件之间的关系进行解析;步骤S300:向主控端设备发起操控询问;步骤S400:对主控端设备在被控端设备上每个远程操控动作将对应的操控页面进行区域划分;步骤S500:对每个远程操控动作与操控询问结果之间的关联性进行校验;步骤S600:当捕捉到未通过关联校验的远程操控动作,将远程操控动作及对应的操控指令向被操控设备端进行预警提示。警提示。警提示。
技术研发人员:刘明洋 宋泓儒
受保护的技术使用者:哈尔滨博敏科技开发有限公司
技术研发日:2022.04.07
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。