1.本发明涉及地下空间施工技术领域,尤其涉及对超大断面隧道(地下空间) 进行分块化点阵式柔性施工的特种装备及施工方法的改进。
背景技术:
2.机械法矩形顶管暗挖技术,因具有对土体扰动小、对城市地面环境影响很小,可有效控制地表沉降、机械化程度高等特点,逐渐在地铁出入口、过街通道、综合管廊、车行隧道等地下工程的建设中得到广泛应用,也逐渐在交通隧道、地铁隧道、地铁车站、城市综合体等方面受到越来越多的关注和重视。然而,随着隧道(地下空间)要求的断面尺寸越来越大,以及在复杂地质条件下,矩形顶管面临的挑战越来越多,对矩形顶管设备在掘进过程中的整体稳定性、地层适应性等方面的要求也越来越高。
3.从目前城市地下工程建设的施工现状来看,受周边建筑物、地下管线、绿化环保、交通倒改等环境因素和条件制约,超大断面(如宽度≥20米、高度≥10米) 的矩形轮廓断面暗挖隧道(地下结构)采用暗挖建造的需求日益增多,但富水、软土、浅覆土等复杂地质条件、工况等因素,导致采用传统的浅埋暗挖、顶管施工技术存在以下诸多问题。
4.其一,采用传统浅埋暗挖技术开挖,对覆土层扰动大,地面变形难以控制,工序多施工风险大,施工效率低下,环境保护难度大,也难以适应矩形轮廓断面的一次成形。
5.其二,若采用传统顶管机,单纯按照断面尺寸制作大规格(即大断面尺寸) 掘进机,如申请人早期的研发成果,“公告号:cn214499066u,名称:模块化顶管机”的专利技术,能够适应断面尺寸的要求,但是随着开挖高度和跨度的加大,覆土厚度减薄,又会出现如下问题:
6.(1)在开挖高宽比大、浅覆土情况下,背土效应越发明显,顶面易起拱,地面变形难以控制,掌子面土体易剪切失稳坍塌;
7.(2)一次性开挖高度过大,掌子面竖向面上空间受力不均匀,顶部、底部土压力差值过大;同样地,一次性开挖跨度过大,掌子面横向面上受力不均匀,左、右侧土压差异也过大。因此,刀盘就产生额外的弯矩和扭矩变形,难以保持一定的平面度,造成顶管机稳定性和掘进姿态控制困难;
8.(3)开挖断面越大,掌子面(迎面)阻力和侧摩阻力均较大,掘进所需总顶力越大(譬如20米
×
15米,覆土厚度暂按6米,顶距50m,估算总顶力约为13500吨),如此对后背基座的要求非常高;
9.(4)对于特大横断面地下空间(譬如20米
×
15米),常规方法就是将结构分成多格,每格单独掘进,再将格与格之间采用二次连接、结构转换,出现后续结构的整体性、防水,结构受力转换、工期、成本等诸多问题,且先、后掘进的两个独立格很难保证不发生错台或偏差,则上述问题更为严重。
10.为此,“申请号:cn202010063647.4,名称:一种大断面矩形顶管机”的专利技术,针对传统矩形地下空间施工中在存在的地层变形控制难度大、程序冗杂、交通及环境影响明
3.0倍。
25.采用一种抽屉式盾构顶管一体机进行超大断面隧道分块化点阵式柔性掘进的施工方法,包括开挖工作井、井内顶管设备及后配套装备的吊装、安装及洞口凿除作业,再按以下步骤进行:
26.1)将所述模块化盾体具有同一前立面的前缘对准工作井井壁预留洞口处的开挖断面;
27.2)在将所述模块化盾体尾部的所述整体盾体推进后置反力基板的后方设置主顶千斤顶;当然,在始发阶段,根据井内空间大小,还有以下设置方式:反力基板后方可以设置环形顶铁或设置管节;
28.3)启动所述模块化盾体最顶层中的任一掘进单元,该任一掘进单元中的伸缩油缸启动,驱动该任一掘进单元中的掘进机头相对于单元壳体向前运行,直至向前推进达到一个掘进单元顶程的设计行程,停机,保持位置;
29.3.1)同层其他掘进单元依次启动;再依次启动最顶层中的其它掘进单元,直至向前推进达到一个掘进单元顶程的设计行程,停机,保持位置;
30.4)接着,依次启动最顶层下各层中的各个“模块化掘进单元”,按照步骤3) 及3.1)的工作机理进行切削掘进作业,直至达到各自的掘进单元顶程的设计行程,即完成一个掌子面的向前切削成型;
31.5)、完成一个掌子面成型后,启动盾体整体推进油缸,将所述模块化盾体向前推进,此时,各掘进单元中的伸缩油缸座同步回缩运动,使各掘进机头完全恢复至掘进单元壳体内部,即恢复至初始状态;
32.6)、然后,盾体整体推进油缸回位,在盾体整体推进油缸与所述整体盾体推进后置反力基板之间安装管节,再将盾体整体推进油缸抵触最末管节的后端面;完成一个设计行程的工作过程;当然,为了对管节形成有效保护,在管节与盾体整体推进油缸之间需要设置u形顶铁、环形顶铁;
33.7)、循环重复步骤1-6),直至完成超大断面隧道全程开挖。
34.在掘进过程中利用所述纠偏盾体内布设的若干纠偏油缸进行左、右和/上、下纠偏量的调节,以实现所述模块化盾体行进轨迹的控制。
35.本发明的抽屉式盾构顶管一体机及超大断面隧道分块化柔性掘进方法,可根据超大断面尺寸的形状来组配“模组化盾体”,将若干“模块化掘进单元”构成点阵式布局。在进行“掌子面”成型时,则由各“模块化掘进单元”按照整体由上至下、同层逐个启动的原则,进行“分区块”掘进。上方“模块化掘进单元”的机头先完成掘进,然后上部伸出的“模块化掘进单元”的机头停留在掘进位置,起“帽檐”作用,防止顶部土体坍塌;在掘进面跨度大、高度大的情况下,避免了超大断面整体掘进,土压力释放引起土体变形强烈、背土,从而造成地面变形以及上部覆土层中的管线破坏的弊端,同时保证挖掘的稳定性。
36.本发明一是将大高度切削作业变为小高度切削作业,便于下层各“模块化掘进单元”的顺利切削掘进,掌子面受力更合理,更符合土力学水土压力受力原理,更利于维持挖掘面(掌子面)的稳定。与传统整体开挖比较,避免一次性超大断面切削对地层的扰动大的缺点,大大降低对覆土厚度一倍洞高的要求,更适合超浅覆土的施工。二是优化了设备结构,克服了现有技术在进行分区化切削作业时存在的上、中层掘进驱动机构与底层驱动机
构采用各自不同的驱动机构,使得驱动力相互干扰,易导致压力失稳的弊端。
37.此外,本发明由模块化、标准化矩形掘进机拼装而成,每个标准化矩形掘进机内嵌各自独立的刀盘刀具及其驱动系统、伸缩顶进油缸、弹性杆件、渣土排出装置等。这样,它既能避免伸缩油缸和后置纠偏油缸出现交叉,也能缓解前部刀盘刀具振动,同时,前后段平面铰接连接,结构灵活,可满足造曲线的功能。同时,箱涵管节整体前行由后置主顶油缸提供反力,即具备有顶管机的功能。
38.本发明的抽屉式盾构顶管一体机还能够通过加长外壳盾体,即可以形成地下结构的拼装和现浇结构的台车空间,因此其应用可拓展成为拼装或现浇盾构。
附图说明
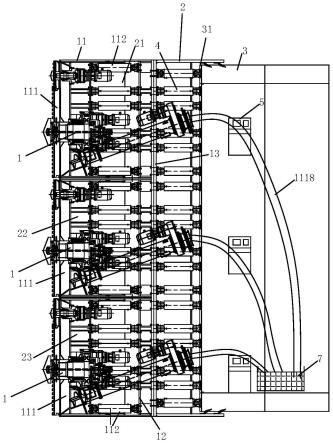
39.图1是本发明抽屉式盾构顶管一体机的结构示意图,
40.图2是图1的左视图,
41.图3是本发明抽屉式盾构顶管一体机处于掘进施工状态的示意图,
42.图4是本发明模块化掘进单元的结构示意图,
43.图5是图4的左视图,
44.图6是本发明模块化掘进单元工作状态示意图,
45.图7是本发明中掘进机头的结构示意图,
46.图8是图7左视图,
47.图9是图7的右视图,
48.图10是本发明中模块化掘进单元壳体的结构示意图,
49.图11是图10的左视图,
50.图12是本发明中纠偏盾体的结构示意图,
51.图13是图12的左视图(局部),
52.图14是本发明中整体盾体推进后置反力基板的结构示意图,
53.图15是本发明模块化掘进单元的工作状态参考图一,
54.图16是本发明模块化掘进单元的工作状态参考图二,
55.图17是本发明掘进工作面的另一实施形式的示意图,
56.图18-23是本发明盾构顶管一体机的工作步序参考图一~六;
57.图中空心箭头表示机构部件运动方向;
58.图中1是掘进单元,11是掘进单元壳体,111是掘进机头,112是伸缩油缸, 12是掘进单元壳体的底环板,13是隔板;
59.1111是机头壳体,1112是胸板,1113是密封圈,1114是主刀盘,11141是主刀盘驱动机构,1115是辅刀盘,11151是辅刀盘驱动机构,1116是出土机喂料口,1117是螺旋出土机,1118是排渣管,1121是伸缩油缸承载基板,1122是伸缩油缸头端安装位,1123是伸缩油缸尾端安装位,1124是伸缩油缸顶进驱动板;
60.2是模组化盾体,21是顶层模组,22是中层模组,23是底层模组;
61.3是管节,31是整体盾体推进后置反力基板,311是定位块,312是纠偏油缸尾部安装位,30是管节内缘;
62.4是纠偏盾体,41是纠偏盾体壳体,42是纠偏油缸,43是密封盾尾刷;
63.5是液压与电气控制系统;
64.6是始发工作井,61是盾体整体推进油缸,62是u形顶铁,63是始发工作井导轨,64是环形顶铁,65是洞门密封装置,66是接收工作井;
65.7是真空泵。
具体实施方式
66.以下结合附图1-17进一步详细说明本发明抽屉式盾构顶管一体机的技术方案,包括模块化盾体2,模块化盾体2包括至少上下两层的掘进单元1,掘进单元1包括掘进单元壳体11、掘进机头111和若干伸缩油缸112;
67.相邻掘进单元1的单元壳体11相互可拆卸式固定连接,构成水平多格状模块化盾体的机身;
68.掘进机头111活动设置在单元壳体11内的前部;在单元壳体11的后部设有一圈掘进单元壳体的底环板12;掘进机头111具有机头壳体1111,在机头壳体 1111内设有胸板1112;若干伸缩油缸112设在底环板12与胸板1112之间,用于驱动掘进机头111在单元壳体11内做往复运动;
69.各掘进单元1的掘进机头111的前缘设于同一前立面。
70.在本发明掘进单元1还包括主刀盘1114、主刀盘驱动机构11141、辅刀盘1115、辅刀盘驱动机构11151、出土机喂料口1116、螺旋出土机1117、排渣管1118、真空泵7以及液压与电气控制系统5等,属于本领域常规技术措施,在本案中不再赘述。
71.各掘进单元壳体11的底环板12的后端面处于同一后立面,且在后立面上还连接有纠偏盾体4,纠偏盾体4包括框形的纠偏盾体壳体41,在纠偏盾体壳体 41朝向掘进单元的端面设有隔板13,纠偏盾体壳体41的中后部设有直立的整体盾体推进后置反力基板31;
72.在隔板13与整体盾体推进后置反力基板31之间设有若干纠偏油缸42,纠偏油缸42的设置位置与掘进单元1上伸缩油缸112的位置相匹配。整体盾体推进后置反力基板31的结构如图13所示,朝向隔板13方向的表面设置有纠偏油缸尾部安装位312,用于连接纠偏油缸42的尾端;整体盾体推进后置反力基板31的背面,按照管节内缘30轮廓设置有定位块311,便于整体盾体推进后置反力基板31的定位。这样整体盾体推进后置反力基板31的背面即能接触后部的首节管节3的前端面。在前部各单个掘进机头111工作、伸缩油缸112驱动进给时,能够将整个挖掘面上产生的偏载力扩散到整体盾体推进后置反力基板31的平面上,以确保设备整体在进行分区化点阵掘进时更为平稳,保持整体盾体的平面度和轴线度,进而保障后续整体推进和纠偏的行进精度。
73.在机头壳体1111中部设有至少一圈密封圈1113,防止泥沙、水的侵入。
74.至少上下两层的掘进单元11中每层至少包括二列掘进单元11。可以形成顶层模组21、中层模组22和底层模组23。也就是说,本发明中模块化盾体2将掘进设备按照单元模块化,组合拼装于“多格抽屉仓式”整体盾体内,“抽屉式掘进设备”在“多格抽屉仓”内形成彼此完全独立的掘进设备单元。“抽屉式掘进设备”在“多格抽屉仓式”整体盾体内,将整个开挖掌子面分区分层成为点阵式独立开挖“掌子面”,按照预设的开挖顺序,各“抽屉式掘进设备”独立切削和推进,直至形成完整的开挖掌子面。各掘进单元掘进一个顶程到位后,保持位置不变,盾体再通过“盾体内置主推油缸”(即:盾体整体推进油缸61)以盾体后方管节结
构提供反力,将盾体向前整体推进一个顶程,同时,通过井内主顶油缸将管节和模组化外壳体整体推进前行,使外部壳体盾构机恢复初始状态,循环下一个掌子面的成型切削掘进。掘进作业闭合循环,各掘进单元与盾体形成往复运动,类似于抽屉一样。
75.设在底环板12与胸板1112之间若干伸缩油缸112中,处于单元壳体11内腔两侧位置伸缩油缸112的两端通过垂直于水平面的铰接轴与底环板12及胸板铰接1112;处于单元壳体内腔上下位置伸缩油缸112的两端通过水平的铰接轴与底环板12及胸板1112铰接。对伸缩油缸112这样的设置措施,能够克服单个掘进机头111在掘进过程中若干伸缩油缸112颤振屈曲,保障伸缩油缸的工作精度。
76.处于上层的掘进单元1的推进行程为相邻下层掘进单元1掘进行程的1.0-3.0 倍,其相差数由工程所需确定。也就是说,掘进单元1的推进行程可以进行调整、干预、控制。有如下两种掘进模式:一种是,开始和结束时,在对工作井井壁立面进行开挖时,全部掘进单元1中掘进机头111处于同一立面,逐个推进或整体推进,在开始或结束阶段,推进行程可以保持一致。第二种是,在隧道挖掘过程中,掘进量由上至下递减,掘进机头伸出后停留在伸出位置,对下层掘进形成一个“帽檐”式保护,上方的掘进单元可以作为掩土结构,防止顶部的土体坍塌。
77.在此种掘进施工状态中,对于推进行程的控制,1、根据覆土厚度、地质条件、地下水、掌子面水土压力大小等情况合理控制上、中、下层模组化掘进单元的伸缩油缸的推出行程在掘进到土层中自然形成台阶式开挖;2、譬如:土层中掘进时,上部模组化掘进单元伸缩油缸伸出90cm,中部模组化掘进单元伸缩油缸伸出60cm,下部模组化掘进单元伸缩油缸伸出30cm,等一个掘进行程完成,上部模组化掘进单元伸缩油缸缩回60cm,中部模组化掘进单元伸缩油缸缩回 30cm,下部模组化掘进单元伸缩油缸缩回30cm,如此循环进入下一个掌子面的开挖掘进。
78.此外,本发明的模组化盾体2其挖掘的断面形状不仅可以是矩形,还可以为如图17的异形,或椭圆形等。
79.以下结合附图18-23进一步说明本发明盾构顶管一体机的施工方法:
80.采用本发明一种盾构顶管一体机进行超大断面隧道分块化点阵式柔性掘进的施工方法,包括开挖工作井、井内顶管设备及后配套装备的吊装、安装及洞口凿除作业,再按以下步骤进行:
81.1)、将模块化盾体具有同一前立面的前缘对准工作井井壁预留洞口处的开挖断面;如图18、19,在始发工作井6形成后,需要在井下设置盾体整体推进油缸61、u形顶铁62、工作井导轨63、环形顶铁64,在井壁预留洞口处设置洞门密封装置65;
82.2)、再将模块化盾体2尾部的整体盾体推进后置反力基板31的后方设置主顶千斤顶(即:盾体整体推进油缸61);当然,在始发阶段,根据井内空间大小,还有以下设置方式:反力基板31可以与环形顶铁64的前端面焊接;或与管节3 的前端面焊接;
83.3)、启动模块化盾体2最顶层中的任一掘进单元1,该任一掘进单元1中的伸缩油缸112启动,驱动该任一掘进单元中的掘进机头相对于单元壳体11向前运行,直至向前推进达到一个掘进单元顶程的设计行程,停机,保持位置;如图 20;
84.3.1)、同层其他掘进单元依次启动;再依次启动最顶层中的其它掘进单元,直至向前推进达到一个掘进单元顶程的设计行程,停机,保持位置;
85.4)、接着,依次启动最顶层下各层中的各个“模块化掘进单元”,按照步骤 3)及3.1)的工作机理进行切削掘进作业,直至达到各自的掘进单元顶程的设计行程,即完成一个掌子面的向前切削成型;
86.5)、完成一个掌子面成型后,启动盾体整体推进油缸,将所述模块化盾体向前推进,此时,各掘进单元中的伸缩油缸座同步回缩运动,使各掘进机头完全退回掘进单元壳体内部,即恢复到初始状态;
87.6)、然后,盾体整体推进油缸回位,在盾体整体推进油缸与整体盾体推进后置反力基板31之间安装管节3,再将盾体整体推进油缸抵触最末管节3的后端面;完成一个设计行程的工作过程;如图21;当然,为了对管节3形成有效保护,在管节3与盾体整体推进油缸之间需要设置u形顶铁62、环形顶铁64;
88.7)、循环重复步骤1-6),直至完成超大断面隧道全程开挖,如图22。
89.最终,如图23,设备推进到接收井66,接收设备。
90.在掘进过程中利用纠偏盾体4内布设的若干纠偏油缸41进行左、右和/上、下纠偏量的调节,以实现模块化盾体2行进轨迹的控制。
91.本发明施工方法的工作原理是:它是由多个点阵式矩阵布置的矩形掘进单元模块化、标准化组合拼装成“相互独立的多格抽屉仓式”的超大断面的盾构(盾构顶管一体)机,将整个开挖掌子面分区分层成为点阵式独立开挖“掌子面”,按照预设的开挖顺序,各“抽屉式掘进单元”在掘进单元壳体的保护下,在相应伸缩油缸的控制下独立切削和推进,直至形成完整的开挖掌子面。各掘进单元掘进一个顶程到位后,保持位置不变,盾体再通过“盾体内置主推油缸”以盾体后方管节结构提供反力,将盾体向前整体推进一个顶程,同时,通过井内主顶油缸将管节和模组化盾体整体向前推进,使外部壳体盾构机恢复初始状态,如此掘进单元相对于模组化盾体像抽屉一样作循环往复运动,进行切削作业,使掘进与整体推进完全分离,从而实现大(或超大)断面隧道开挖和掘进。
92.施工进入隧道内部时:“上下、左右分先后切削”的原则,即“分区化”点阵式掘进,先由“点”连成“面”,再“整体推进”的掘进方式。具体为:本发明由上之下逐次掘进,上方“模块化掘进单元”的机头先完成掘进,然后上部伸出的“模块化掘进单元”的机头停留在掘进位置,起“帽檐”作用,防止顶部土体坍塌;在掘进面跨度大、高度大的情况下,避免了超大断面整体掘进,土压力释放引起土体变形强烈、背土效应明显,从而造成地面变形以及上部覆土层中的管线破坏的弊端,同时保证挖掘的稳定性。本发明前部驱动各掘进机头的伸缩油缸,由于是“点阵”运动,在断面上就会呈现偏载力;为此,本发明在纠偏盾体 4的后部,采用“浮动”连接形式,设置了整块的整体盾体推进后置反力基板31,并将纠偏油缸与前部伸缩油缸位置对应设置,使得系统整体在点阵掘进、整体送进过程中,保持整体盾体的平面度和轴线度,实现平稳、精确的运行。
93.本发明一种抽屉式盾构顶管一体机及施工方法的具有以下特点:
94.(1)整体设计为一种具有抽屉式、矩阵布置、模块化、标准化等特点,通过组合形成上下分台阶及左右先后开挖模式的超大断面矩形盾构(盾构顶管一体) 掘进机。
95.(2)设备、施工工法以及顶进结构型式突破顶管传统理念,可解决采用传统超大断面顶管无法解决的问题,即设计一种将基于盾构掘进与顶管掘进两种工法的优点,以此相结合。
96.(3)每个掘进单元就是一台模块化、标准化矩形盾构机。
97.(4)每个模块化掘进单元(内部矩形掘进机)在各自独立的伸缩油缸控制下可实现如抽屉式一样相对于“整机区格盾体”作循环往复运动。
98.(5)每个抽屉式掘进单元具有模块化的特点,对于超大断面而言,设备模块化制造、运输、现场拼装都可形成标准化,方便运输、吊装,组合灵活,互换性好,减少超大断面顶管设备在单个项目中的投入成本,同时各掘进单元分块运行,大大减小超大设备动力需求,成本可控,经济性好。
99.(6)分块切削,即采用对超大断面以“化整为零”的方式“上下分台阶、左右先后切削”;然后一次整体推进,相当于将超大断面分成多个小断面,掘进施工时符合水土压力受力特点,可保证开挖掌子面稳定性,有效减小背土效应和对上覆土体的扰动,降低施工对地面建(构)筑物和地下管线的影响,整体地面变形可控。
100.(7)由于采用若干个模块化、标准化矩形盾构机,通过“模块化掘进单元”内若干组推进油缸和“整体盾体推进油缸”将掘进和纠偏与工作井后靠的主顶油缸的整体推进分开进行,即“模块化掘进单元”内置推进油缸设备仅需满足掘进单元推进反力,井内后置主顶油缸只需提供顶进时盾体、管节与隧道周边土层摩阻力,这样既减小井内主顶油缸的总顶力,也大幅减小超大断面一次顶进造成的后靠顶进力大、后靠结构受力和计算复杂等问题,同时也降低了施工风险与成本。 (譬如:顶进断面20米
×
15米,覆土厚度暂按6米,顶距50m,估算总顶力约为13500吨,而采用4个“模块化掘进单元”进行分块顶进后,单个掘进单元所需总顶力约为3500吨~4300吨,为超大断面一次顶进时总顶力的1/3~1/4倍)。
101.(8)管片一体设计,井内整体拼装,一次推进,解决多次推进造成管节纵向拼装的连接密封、防水、渗漏处理以及结构转换等复杂问题。
102.本发明的抽屉式盾构顶管一体机,每个模块、每个掘进单元既可单独使用,即每个模块就是一个标准化的掘进单元,也可将单个模块进行按需组合,可拼装成超大规格尺寸的矩形盾构(盾构顶管一体)机,各个“模块化掘进单元”均可进行单独推进、切削、排土等,各个“模块化掘进单元”也可协同作业,进行组合推进、切削、排土等。
103.该抽屉式盾构顶管一体机按照单元模块化,组合拼装于“多格抽屉仓式”整体盾体内,“抽屉式矩形盾构机”在“多格抽屉仓”内形成彼此完全独立的掘进设备单元。“抽屉式矩形盾构机”在“多格抽屉仓式”整体盾体内,将整个开挖掌子面分区分层成为点阵式独立开挖“掌子面”,按照预设的开挖顺序,各“抽屉式矩形盾构机”独立切削和推进,直至形成完整的开挖掌子面。各掘进单元掘进一个顶程到位后,保持位置不变,盾体再通过“盾体内置主推油缸”以盾体后方管节结构提供反力,将盾体向前整体推进一个顶程,同时,通过井内主顶油缸将管节和模组化盾体整体推进前行,使外部壳体盾构机恢复初始状态,循环下一个掌子面的成型切削掘进。掘进作业闭合循环,各掘进单元与盾体形成往复运动,类似于抽屉一样。
104.该抽屉式盾构顶管一体机的每个掘进单元可进行点阵式矩阵拼装组合,每个模块化掘进单元对土体进行点切削作业,由点连成面,因此该抽屉式盾构顶管一体机能够满足在大或超大断面尺寸、浅覆土、地下管线复杂、地面变形要求严格、地质条件复杂等难度较大的条件下的施工。
105.本发明的设备,从力学角度:由大跨度变为小跨度,由大高度变为小高度,空间受
力更合理;从工法角度:先分块掘进再整体推进,沉降可控更安全;可实现矩形盾构与顶管模式方便切换;从经济角度:设备模块化、标准化,动力分散,设备所需动力配置可大大减少,后靠设计复杂变简单,效益明显。各掘进单元按照设置好的程序进行独立的掘进作业,采用分散式低负荷的动力需求,即相对超大断面掘进整机而言,驱动动力需求大大降低。
106.本发明同时解决了顶进过程中出渣繁琐问题,因为各掘进单元具有独立切削、独立进行渣土改良、自带出土系统等的特点,采用真空泵-管道排渣方式,避免了掘进单元越多出土机数量也越多、盾体内空间布置密集、出渣不畅影响掘进效率等难题。
107.本发明的设备结构灵活可变换施工,可用于现浇盾构、洞内拼装、曲线顶管等领域。
108.本发明实现超大断面矩形盾构(顶管)一体机,“模块化掘进单元”便于工厂批量生产,减少定制化的高成本。能根据设计需求的断面尺寸,随意组合,避免尺寸调整需新制造设备的浪费。模块化组合,便于快速安装,减少运输安装成本。
109.本发明解决了超大断面矩形掘进施工中的难题,将在城市地下空间开发建设中发挥巨大作用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
