技术特征:
1.一种平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:包括:以装配线节拍和平滑指数为主次优化目标,建立平衡装载机总装过程协同调度的整数规划模型;设计增强分布估计算法对优化目标进行优化。2.根据权利要求1所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:所述平滑指数指标具体为:式中,k代表工作站编号;w=1,2分别代表左侧、右侧工作站;st
k,w
代表第k组工作站w侧工作站的装配时长;st
max
代表装配时长最长的工作站的装配时长;si则表示平滑指数。3.根据权利要求1所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:所述平衡装载机总装过程协同调度的整数规划模型,包括:优化目标:minct=min[sf
max
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)minsi
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)决策变量:决策变量:约束条件为:约束条件为:pset={(i,j)|i<j,i,j∈s
op
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)其中,公式(2)(3)表示优化模型的优化目标,装配线节拍为主要优化目标,平滑指数为次要优化目标,ct表示装配线节拍,sf
max
表示完工时间最大的工作站的完工时间,si表示平滑指数;公式(4)为决策变量,u
i,k,w
表示工序i是否分配至工作站k的w侧方向,u
i,k,w
=1表示已分配,u
i,k,w
=0表示未分配,n代表平衡装载机总装过程工序数目,m表示总装过程工作站组数;公式(5)表示装配线为双边作业;约束(6)表示第k组工作站的w侧装配的工序的装配时长不能超过装配线节拍约束,t
i
表示工序i的装配时长;约束(7)表示每个工序仅能被安排至一个工作站;约束(8)中pset表示工序优先关系矩阵,i<j表示工序i必须先于工序j装配,s
op
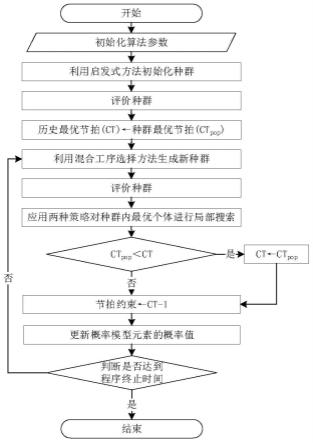
表示所有需要装配的工序集合。4.根据权利要求1所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:所述增强分布估计算法,包括:步骤1、以整数编码方式对种群个体进行编码;设置种群大小;设置初始装配线节拍;步骤2、在满足平衡装载机总装过程协同调度的整数规划模型中约束条件下利用启发式规则生成初始种群;
步骤3、评价初始种群:依据平衡装载机总装过程协同调度的整数规划模型,计算生成初始种群个体的装配线节拍值和平滑指数值;将种群内评价值最优的个体作为初代最优个体并更新平衡装载机总装过程协同调度的整数规划模型中的装配线节拍约束;如果存在多个最优,则随机选择一个;其中,装配线节拍约束的更新规则是利用初代最优个体的装配线节拍值减一得到;步骤4、利用概率模型学习生成个体的工序排列信息,获得新的概率模型,并利用结合启发式规则的采样方法形成新种群;步骤5、评价新种群:计算生成个体的装配线节拍值和平滑指数值,如果新种群内评价值最优的个体优于历史最优个体,则更新历史最优个体和装配线节拍约束;否则,不更新;步骤6、利用适合主次优化目标的局部搜索策略对最优个体进行局部搜索;其中,局部搜索策略包括主要优化目标的局部搜索策略、次要优化目标的局部搜索策略,次要优化目标的局部搜索策略的启动条件设置为,连续q代主要优化目标搜索策略评价值无改进;步骤7:若不满足算法终止条件,则返回步骤4;步骤8:将输出的最优个体作为平衡装载机总装过程协同调度的解。5.根据权利要求4所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:所述启发式规则生成初始种群,具体为:首先,工作站逐组开启并优先选择工作站空闲时间较大方向侧作为工序的待选方向,如果两侧方向工作站空闲时间相等,则选左侧;然后,优先选择产生空闲时长最小的工序,若存在多个空闲时长最小的工序,则从空闲时长最小工序集中随机选择工序;重复上述过程得到初始个体,进而生成初始种群。6.根据权利要求4所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:所述结合启发式规则的采样方法,具体为:首先,工作站逐组开启并优先选择工作站空闲时间较大方向侧作为工序的待选方向,如果两侧方向工作站空闲时间相等,则选左侧;然后,优先选择产生空闲时长最小的工序,若存在多个空闲时长最小的工序,则从产生空闲时间最小的工序集中以采样新的概率模型的方式选择工序;重复上述过程得到初始个体,进而生成新种群。7.根据权利要求4所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:概率模型设置为三维,用于学习连续三个工序之间的组合关系。8.根据权利要求4所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:针对主要优化目标的局部搜索策略设置为随机选择个体中的工序,对其在当前工作站内做局部向后插入操作,设置主优化最大操作次数。9.根据权利要求4所述的平衡装载机总装过程协同调度的增强分布估计优化方法,其特征在于:针对次要目标的局部搜索策略设置为以偏差最大组工作站上随机选择的工序为操作对象,对其做局部向后插入操作,设置次优化最大操作次数;其中,偏差指的当前组工作站左右两侧的装配时长之差。10.一种平衡装载机总装过程协同调度的增强分布估计优化系统,其特征在于:包括:建立模块,用于以装配线节拍和平滑指数为主次优化目标,建立平衡装载机总装过程
协同调度的整数规划模型;优化模块,用于设计增强分布估计算法对优化目标进行优化。
技术总结
本发明公开了一种平衡装载机总装过程协同调度的增强分布估计优化方法,属于装配线平衡技术领域。本发明方法包括:以装配线节拍和平滑指数为主次优化目标,建立平衡装载机总装过程协同调度的整数规划模型;设计增强分布估计算法对优化目标进行优化。本发明将装配节拍作为主要优化目标,平滑指数作为次级优化目标,使优化方案工作站的工作量更加均衡,同时又能保证高效的生产效率;针对工序排列设计的增强分布估计算法能够快速生成满足约束条件的优质解,从而保证算法能够快速响应实际生产中装载机总装过程变化的情景。中装载机总装过程变化的情景。中装载机总装过程变化的情景。
技术研发人员:张梓琪 张腾飞 钱斌 胡蓉
受保护的技术使用者:昆明理工大学
技术研发日:2022.04.01
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。