1.本发明涉及工业过程监测和故障检测领域,具体的是提出基于核混合空间投影的故障检测方法。
背景技术:
2.随着工业系统的快速发展,实时监测设备的生产过程是不可或缺的一环,如有故障发生,往往会带来巨大的经济损失,因此找到一种高效可靠的故障测方法是非常必要的。在过程监控和故障诊断等领域,能否提取发生故障的特征是检测出故障的关键,现阶段大量的特征提取方法被提出用于实时监测化工过程的运行状态,其中主成分分析(pca)和局部保持投影(lpp)是应用非常广泛的的两种故障检测方法。
3.pca是一种无监督特征提取方法,它试图找到一组相互正交的基,从而使重构误差在由数据协方差矩阵的主特征向量张成的低维子空间内最小化。受非线性方法主要思想的启发,lpp明确地考虑了流形结构。它试图找到一种嵌入方法,从而保留局部信息并获得一个样本子空间,使其能够成功地检测出样本的流形结构。pca和lpp在故障检测领域中虽然取得了一定的成效,但从算法角度出发,pca仅考虑了故障样本的欧氏结构,而lpp则只是保留了隐藏在数据中的局部子流形结构。由于在实际应用中原始故障数据样本通常是非线性和非平稳的,因此这些方法均无法达到较好的故障检测性能。
技术实现要素:
4.为解决上述背景技术中无法全面利用故障样本全局、局部以及非线性信息的不足,本发明提出了一种基于核混合空间投影(kernel mixed space projections,kmsp)的故障检测模型,它不仅融合故障数据的局部几何特征和全局欧式结构信息,而且该模型也是一种非线性的降维方法,可以充分利用训练集样本间的非线性信息,从而具备较好的故障检测性能。
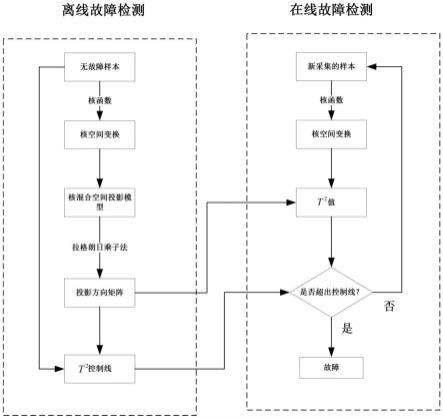
5.本发明提出了基于核混合空间投影的故障检测方法,该方法主要分为两大部分:离线故障检测过程和在线故障检测过程。
6.步骤1:离线故障检测过程,具体包括如下步骤:
7.步骤1.1:借助核函数将无故障的样本进行核空间变换,以增强无故障样本的高维可分性,得到高维核空间样本矩阵;
8.利用离线正常数据构成训练样本矩阵x=[x1,x2,
…
,xn]∈rm×n,其中m是每个样本xi的维数,n为样本个数,通过映射函数φ(
·
)将原始低维空间数据映射到高维核特征空间中,可以得到高维核空间的样本矩阵φ(x)=[φ(x1),φ(x2),
…
,φ(xn)]。
[0009]
步骤1.2:借助样本间的局部关系和全局关系来构建核混合空间投影模型;
[0010]
(1)核混合空间投影模型融合了样本空间中的局部几何和全局信息,为了发现训练集的局部子流形结构,定义局部相似矩阵如下:
[0011][0012]
其中nk(x)表示样本x的k近邻样本集,t∈(0, ∞)是一个核参数,φ(x)为通过核方法转换到高维空间中的样本矩阵;
[0013]
(2)为了保留全局信息并反映任意两个样本之间的关系,定义全局相似矩阵w
global
为:
[0014][0015]
(3)该方法中目标函数分为两个部分,第一部分用于发现样本空间中的局部子流形结构,第二部分用于寻找样本空间中的全局欧氏结构,两个优化模型如下:
[0016][0017][0018]
其中φ(x)为核空间样本矩阵,l
local
=d
local-w
local
,l
global
=d
global-w
global
。
[0019]
(4)压缩局部子流形结构并保持全局结构信息,目标函数定义为以下优化问题:
[0020][0021]
其中α∈[0,1]是一个权衡参数,g为对应的变换矩阵;
[0022]
(5)将全局信息视为局部结构的特例,可以得到以下两个模型约束:
[0023]
tr(g
t
φ(x)d
local
φ(x)
t
g)=const1[0024]
tr(g
t
φ(x)d
global
φ(x)
t
g)=const2[0025]
其中矩阵d
local
和d
global
是对角矩阵,其对角项分别为局部相似矩阵w
local
及全局相似矩阵w
global
的列和;
[0026]
(6)为了保持训练集的弹性,将上述两个约束转化为一个约束,同时利用样本点的局部和全局特性,该模型构建如下:
[0027][0028]
s.t.tr(g
t
φ(x)(d
local-d
global
)φ(x)
ts
g)=const
[0029]
由于核映射函数φ(
·
)是未知的,φ(x)不能直接被计算,因此,利用通用核策略g=φ(x)a,模型进一步转化为如下优化模型:
[0030][0031]
s.t.tr(a
t
k(d
local-d
global
)k
t
a)=const
[0032]
其中k=φ(x)
t
φ(x)是φ(x)对应的核矩阵,此外,a被称为对应于g的投影矩阵,通过k
ij
=《φ(xi),φ(xj)》=exp(-||x
i-xj||2/(2t2))可以直接计算核矩阵k对应的第(i,j)个元素k
ij
;
[0033]
步骤1.3:利用拉格朗日乘子法将步骤二中投影模型的求解问题转化为广义特征值分解问题,以直接获得空间投影方向的解析解;
[0034]
(1)通过固定分子的同时最大化分母来得到最优化结果,首先利用拉格朗日乘子法构造a的拉格朗日函数l(a):
[0035]
l(a)=a
t
k((1-α)w
local
αl
global
)k
t
a-λ(a
t
k(d
local-d
global
)k
t
a-const))
[0036]
(2)其中λ表示拉格朗日乘子,令l(a)相对于a的偏导数设置为零,可以得到:
[0037][0038]
(3)转换为如下广义特征值问题:
[0039]
k((1-α)w
local
αl
global
)k
t
a=λk(d
local-d
global
)k
ta[0040]
求解得出特征值和特征向量,取前d个最大特征值对应的特征向量a1,a2,
…
,ad,从而能够得出空间投影方向矩阵a=[a1,a2,
…
,ad]。
[0041]
步骤1.4:利用上述无故障样本和获得的空间投影方向,计算统计量t2的控制限。
[0042][0043]
其中n为样本个数,d为保留的主元个数,α为置信度,f
d,n-d,α
为带有d和n-d个自由度、置信度为α的f分布。
[0044]
步骤2:在线故障检测过程:
[0045]
步骤2.1:借助离线故障检测中的核函数将新采集的样本进行核空间变换,得到测试样本矩阵;
[0046]
步骤2.2:利用离线故障检测获得的空间投影方向来计算新采集样本的统计量t2的值;
[0047]
t2=z
ta·
λ-1
·atz[0048]
其中z为新采集的测试样本矩阵,a为离线过程所求得的投影方向,λ=daig{λ1,λ2,
…
,λd}前d个特征值构成的对角矩阵。
[0049]
步骤2.3:将所得的统计量t2值与离线故障检测过程所得控制限进行对比,t2值没有超过t2控制限为正常,超过t2控制限为故障,从而实现故障的检测。
[0050]
本发明的有益效果是:
[0051]
1、本发明可以充分利用故障样本间的非线性信息,从而得到更好的故障识别性能;
[0052]
2、本发明故障数据集的局部几何结构被很好地保留,使得该方法继承了lpp和npe等基于局部的降维方法的优点,另外,kmsp可以发现隐藏在训练样本集中的非线性子流形结构;
[0053]
3、本发明充分利用了训练集中包含的全局信息,使得kmsp看到了欧式结构,而不破坏训练样本集的总体分布。
附图说明
[0054]
图1是基于kmsp模型的故障检测方法流程示意图;
[0055]
图2是本发明方法在te故障数据集中第一种故障的实验结果图。
的值;
[0072]
t2=a
tknew
·
λ-1
·knewta[0073]
其中z为新采集的测试样本矩阵,a为离线过程所求得的投影方向,λ=diag{λ1,λ2,
…
,λd}是由前d个最大特征值构成的对角矩阵。
[0074]
步骤2.3:将所得的统计量t2值与离线故障检测过程所得控制限进行对比,t2值没有超过t2控制限为正常,超过t2控制限为故障,从而实现故障的检测。
[0075]
图2和图3直观展示了在第一种故障和第二种故障上的t2值及其故障情况,两种故障均是前160个样本为正常样本,后800个样本为故障样本。对于第一种故障情况,948个样本检测准确,其检测的准确率为98.75%。对于第二种故障情况,940个样本检测准确,其检测的准确率为97.81%。从实验结果可以看出该方法具有很好的故障检测准确性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。