技术特征:
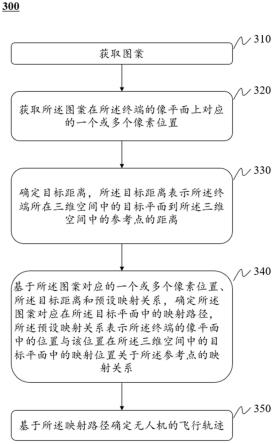
1.一种无人机的飞行控制方法,包括:获取图案;获取所述图案在终端的像平面上对应的一个或多个像素位置;确定目标距离,所述目标距离表示所述终端所在三维空间中的目标平面到所述三维空间中的参考点的距离;基于所述图案对应的一个或多个像素位置、所述目标距离和预设映射关系,确定所述图案对应在所述目标平面中的映射路径,所述预设映射关系表示所述终端的像平面中的位置与该位置在所述三维空间中的目标平面中的映射位置关于所述参考点的映射关系;基于所述映射路径确定无人机的飞行轨迹。2.如权利要求1所述的方法,所述获取终端上的画面中的图案包括:通过用户在终端上绘图得到所述图案。3.如权利要求1所述的方法,所述确定目标距离包括:获取无人机在所述三维空间中的目标位置;确定所述目标位置到所述三维空间中的参考点的距离,并将其确定为所述目标距离。4.如权利要求1所述的方法,所述参考点为所述终端的光心。5.如权利要求1所述的方法,所述基于所述图案对应的一个或多个像素位置、所述目标距离和预设映射关系,确定所述图案对应在所述目标平面中的映射路径包括:基于所述一个或多个像素位置、所述目标距离、所述预设映射关系,确定所述一个或多个像素位置对应在所述目标平面中的一个或多个映射位置;基于所述一个或多个映射位置,确定所述映射路径。6.如权利要求1所述的方法,所述预设映射关系包括第一预设公式:x/yc=y/zc=f/xc,其中,x为所述像平面中某个像素位置在所述像平面中预设的图像坐标系中的x轴坐标值,y为图像中某个点在图像坐标系中的y轴坐标值,f为所述参考点到所述像平面的距离,xc为所述某个像素位置对应在所述目标平面中的映射位置在预设的终端坐标系中的x
c
轴坐标值,yc为该点对应在所述目标平面中的映射位置在终端坐标系中的y
c
轴坐标值,zc为所述某个像素位置对应在所述目标平面中的映射位置在终端坐标系中的z
c
轴坐标值;预设的图像坐标系中的x轴和y轴通过预设确定;预设的终端坐标系中的x
c
轴、y
c
轴、z
c
轴通过预设确定;xc等于所述目标距离。7.如权利要求6所述的方法,所述预设映射关系还包括第二预设公式:u=x/α c
x
,v=y/β c
y
,其中,u为所述像平面中所述某个像素位置在预设的像素坐标系中的u轴坐标值,v为所述像平面中所述某个像素位置在预设的像素坐标系中的v轴坐标值,α为预设的像素坐标系中一个像素在x轴方向上的长度,β为预设的像素坐标系中一个像素在y轴方向上的长度,c
x
为预设的图像坐标系的原点与预设的像素坐标系的原点在x轴方向的偏移量,c
y
为预设的图像坐标系的原点与预设的像素坐标系的原点在y轴方向的偏移量;预设的像素坐标系中的u轴和v轴通过预设确定,且u轴与x轴平行,v轴和y轴平行;α和β基于所述终端的相关参数确定。8.如权利要求1所述的方法,所述预设映射关系包括第三预设公式:
其中,u为所述像平面中某个像素位置在预设的像素坐标系中的u轴坐标值,v为所述像平面中所述某个像素位置在预设的像素坐标系中的v轴坐标值,xc为所述某个像素位置对应在所述目标平面中的映射位置在预设的终端坐标系中的x
c
轴坐标值,yc为该点对应在所述目标平面中的映射位置在终端坐标系中的y
c
轴坐标值,zc为所述某个像素位置对应在所述目标平面中的映射位置在终端坐标系中的z
c
轴坐标值;预设的像素坐标系中的u轴和v轴通过预设确定;预设的终端坐标系中的x
c
轴、y
c
轴、z
c
轴通过预设确定;xc等于所述目标距离;以及f
y
=(1/α*f)/xc,f
z
=(1/β*f)/xc;其中,f为所述参考点到所述像平面的距离,α为预设的像素坐标系中一个像素在所述像平面中的x轴方向上的长度,β为预设的像素坐标系中一个像素在所述像平面中的y轴方向上的长度;x轴和y轴通过预设确定,且u轴与x轴平行,v轴和y轴平行;α和β基于所述终端的相关参数确定。9.如权利要求1所述的方法,所述方法还包括:控制所述无人机按照所述飞行轨迹飞行;获取所述无人机的飞行轨迹视频。10.一种无人机的飞行控制系统,包括;图案获取模块,用于获取图案;图案转换模块,用于获取所述图案在所述终端的像平面上对应的一个或多个像素位置;目标距离确定模块,用于确定目标距离,所述目标距离表示所述终端所在三维空间中的目标平面到所述三维空间中的参考点的距离;映射路径确定模块,用于基于所述图案对应的一个或多个像素位置、所述目标距离和预设映射关系,确定所述图案对应在所述目标平面中的映射路径,所述预设映射关系表示所述终端的像平面中的位置与该位置在所述三维空间中的目标平面中的映射位置关于所述参考点的映射关系;飞行轨迹确定模块,用于基于所述映射路径确定无人机的飞行轨迹。11.一种无人机的飞行控制装置,包括至少一个存储介质和至少一个处理器,所述至少一个存储介质用于存储计算机指令;所述至少一个处理器用于执行所述计算机指令以实现如权利要求1-9中任一项所述的方法。
技术总结
本说明书实施例提供一种无人机的飞行控制方法,所述方法包括:获取图案;获取所述图案在终端的像平面上对应的一个或多个像素位置;确定目标距离,所述目标距离表示所述终端所在三维空间中的目标平面到所述三维空间中的参考点的距离;基于所述图案对应的一个或多个像素位置、所述目标距离和预设映射关系,确定所述图案对应在所述目标平面中的映射路径,所述预设映射关系表示所述终端的像平面中的位置与该位置在所述三维空间中的目标平面中的映射位置关于所述参考点的映射关系;基于所述映射路径确定无人机的飞行轨迹。射路径确定无人机的飞行轨迹。射路径确定无人机的飞行轨迹。
技术研发人员:张海洋 谢恒 张通 王孟秋
受保护的技术使用者:杭州零零科技有限公司
技术研发日:2022.03.23
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。