技术特征:
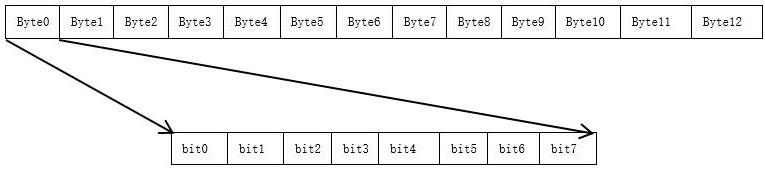
1.一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述mcu模组与所述ap模组之间通过spi电路连接,包括以下步骤:定义spi协议,ap模组和mcu模组一次交换13个字节固定长度的信息;定义ap模组发送给mcu模组的字节格式;定义mcu模组发送给ap模组的字节格式。2.根据权利要求1所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述定义ap模组发送给mcu模组的字节格式时:byte0中bit4~bit6代表有效数据内容的长度,bit7表明当前传输的can报文是标准帧还是扩展帧,byte0低四位bit0~bit3定义如下:0000:用于功能扩展;0001:代表当前ap模组发给mcu模组的信息是跟车辆电子控制相关的can报文,且通过can0通道跟车辆交互;0010:代表当前ap模组发给mcu模组的信息是跟车辆电子控制相关的can报文,且通过can1通道跟车辆交互;0011:代表当前ap模组发给mcu模组的信息是跟车辆电子控制相关的can报文,且通过can2通道跟车辆交互;0100:代表当前ap模组中娱乐车机系统开机完成,由ap模组发送给mcu模组;此时,byte1~byte8填充“systemok”内容,byte9~byte12未用,用0填充;0101:代表ap模组请求查询mcu模组中电子控制系统软件版本号,由ap模组发送给mcu模组;此时,byte1~byte8填充“mcu_ver?”内容,byte9~byte12未用,用0填充;0110:代表ap模组请求复位,此时,byte1到byte5的值为“reset”,mcu模组收到该信息后会给ap模组执行断电再上电的动作;0111~1100:用于功能扩展;1101:代表ap模组发送给mcu模组的信息报文,具体信息内容从byte1~byte12字节中的内容进行获取;1110:代表ap模组发给mcu模组的信息是mcu模组控制软件的升级包数据;此时,byte1~byte8是实际的数据内容,byte9~byte12未用,用0填充;1111:用于功能扩展。3.根据权利要求2所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述0001的定义中,通过byte0的bit7位表明当前传输的can报文类型是标准帧还是扩展帧,bit7为0表明是标准帧,bit7为1表明是扩展帧;若是标准帧,byte3和byte4两个字节表示标准帧canid,byte3是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据,byte1和byte2未用;若是扩展帧,byte1~byte4四个字节表示扩展帧canid,byte1是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据。所述0010的定义中,通过byte0的bit7位表明当前传输的can报文类型是标准帧还是扩展帧,bit7为0表明是标准帧,bit7为1表明是扩展帧;若是标准帧,byte3和byte4两个字节表示标准帧canid,byte3是高位,byte4是低位,
byte5~byte12是8个字节的can报文具体数据,byte1和byte2未用;若是扩展帧,byte1~byte4四个字节表示扩展帧canid,byte1是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据;所述0011的定义中,通过byte0的bit7位表明当前传输的can报文类型是标准帧还是扩展帧,bit7为0表明是标准帧,bit7为1表明是扩展帧;若是标准帧,byte3和byte4两个字节表示标准帧canid,byte3是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据,byte1和byte2未用;若是扩展帧,byte1~byte4四个字节表示扩展帧canid,byte1是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据。4.根据权利要求2所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述1101的定义中,若byte1值为1,则byte2~byte5内容是mcu模组中电子控制系统软件ota升级包的crc32校验值,byte7~byte8内容是mcu模组中电子控制系统软件ota升级包的大小;若byte1值为2,byte2~byte4为“end”,则表示mcu模组中电子控制系统软件ota升级包数据已传输完成;若byte1值为4,byte2~byte5为“stop”,则表示将停止mcu模组中电子控制系统软件升级;若byte1值为7,byte2~byte5为“log1”,则表示ap模组通知mcu模组中电子控制系统软件的log等级调整到level1;若byte1值为7,byte2~byte5为“log2”,则表示ap模组通知mcu模组中电子控制系统软件的log等级调整到level2;其他未用值用于功能扩展。5.根据权利要求1所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述定义mcu模组发送给ap模组的字节格式时:byte0中bit4~bit6代表有效数据内容的长度,bit7表明当前传输的can报文是标准帧还是扩展帧,byte0低四位bit0~bit3定义如下:0000:可用于功能扩展;0001:代表当前mcu模组发给ap模组的信息是跟车辆电子控制相关的can报文,且通过can0通道跟车辆交互;0010:代表当前mcu模组发给ap模组的信息是跟车辆电子控制相关的can报文,且通过can1通道跟车辆交互;0011:代表当前mcu模组发给ap模组的信息是跟车辆电子控制相关的can报文,且通过can2通道跟车辆交互;0100:用于功能扩展;0101:用于功能扩展;0110:代表mcu模组向ap模组传递车辆方向盘按键信息;0111:代表mcu模组给ap模组反馈mcu模组中电子控制系统软件的版本号,此时,byte1~byte6字节的内容格式为“rs_vxx”,其中的xx代表具体的版本号,比如rs_v01;1000:用于功能扩展;
1001:用于功能扩展;1010:代表mcu模组给ap模组反馈的固件升级状态;1011:用于功能扩展;1100:用于功能扩展;1101:代表mcu模组给ap模组发送的信息报文;1110:用于功能扩展;1111:代表mcu模组给ap模组发送的电子控制系统软件的log日志信息。6.根据权利要求5所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述定义0001中,通过byte0的bit7位表明当前传输的can报文类型是标准帧还是扩展帧,bit7为0,表明是标准帧,bit7为1,表明是扩展帧;若是标准帧,byte3和byte4两个字节表示标准帧canid,byte3是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据,byte1和byte2未用;若是扩展帧,byte1~byte4四个字节表示扩展帧canid,byte1是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据;所述定义0010中,通过byte0的bit7位表明当前传输的can报文类型是标准帧还是扩展帧,bit7为0,表明是标准帧,bit7为1,表明是扩展帧;若是标准帧,byte3和byte4两个字节表示标准帧canid,byte3是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据,byte1和byte2未用;若是扩展帧,byte1~byte4四个字节表示扩展帧canid,byte1是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据。所述定义0011中,通过byte0的bit7位表明当前传输的can报文类型是标准帧还是扩展帧,bit7为0,表明是标准帧,bit7为1,表明是扩展帧;若是标准帧,byte3和byte4两个字节表示标准帧canid,byte3是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据,byte1和byte2未用;若是扩展帧,byte1~byte4四个字节表示扩展帧canid,byte1是高位,byte4是低位,byte5~byte12是8个字节的can报文具体数据。7.根据权利要求5所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述定义0110中,若byte1的bit0位为1时,表示车辆方向盘上down键按下;若byte1的bit1位为1时,表示车辆方向盘上up键按下;若byte1的bit2位为1时,表示车辆方向盘上mode键按下;若byte1的bit3位为1时,表示车辆方向盘上vol 键按下;若byte1的bit4位为1时,表示车辆方向盘上vol-键按下;若byte1的bit5位为1时,表示车辆方向盘上mute键按下;若byte1的bit6位为1时,表示车辆方向盘上bton键按下;未用bit用0填充;若byte2的bit0位为1时,表示车辆方向盘上的接听电话键按下;若byte2的bit1位为1时,表示车辆方向盘上的挂断电话键按下;其他未用bit为用0填充;若byte3的bit0位和bit1位数值为1,表示车辆方向盘上的seek-键正被用户短按;若byte3的bit0位和bit1位数值为2,表示车辆方向盘上的seek-键正被用户长按;
若btye3的bit2位和bit3位数值为1,表示车辆方向盘上的seek 键被用户短按;若byte3的bit2和bit3位数值为2,表示车辆方向盘上的seek 键被用户长按;若byte4的bit0位为1,表示车辆方向盘上的src按键被按下。8.根据权利要求5所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述定义1010中,byte1~byte7的值均为1,若byte7的bit0位为1,表示mcu模组接收到的电子控制系统软件的ota软件包的版本号和当前版本号相同,无需升级;若byte7的bit1位为1,则表明mcu模组此时未提取到ota软件包的版本号;若byte7的bit2位为1,则表示mcu模组成功接收ota软件包,并且crc32校验成功;若byte7的bit3位为1,则表明mcu模组停止接收ota软件包,恢复到正常工作状态。9.根据权利要求5所述的一种车载mcu模组与ap模组之间的通信方法,其特征在于,所述定义1101中,若byte1值为1,byte2~byte6的值为“reset”,则表明mcu模组收到了ap模组发送过来的复位请求;若byte1值为2,byte2~byte8的值为“scrn_on”,则表明mcu模组通知ap模组打开屏幕背光;若byte1值为2,byte2~byte9的值为“scrn_off”,则表明mcu模组通知ap模组关闭屏幕背光;若btye1值为3,byte2~byte7的值为“acc_on”,则表明mcu模组通知ap模组汽车已上电;若btye1值为3,byte2~byte8的值为“acc_off”,则表明mcu模组通知ap模组汽车已下电;若btye1值为4,byte2~byte9的值为“light_on”,则表明mcu模组通知ap模组汽车小灯已打开;若btye1值为4,byte2~byte10的值为“light_off”,则表明mcu模组通知ap模组汽车小灯已打关闭;其余未使用bit用0填充。10.一种用于权利要求1至9任一项所述的一种车载mcu模组与ap模组之间的通信方法的通信系统,其特征在于,包括mcu模组、spi电路和ap模组,所述mcu模组通过所述spi电路与所述ap模组通信。
技术总结
本发明涉及一种车载MCU模组与AP模组之间的通信方法,所述MCU模组与所述AP模组之间通过SPI电路连接,包括以下步骤:定义SPI协议,AP模组和MCU模组一次交换13个字节固定长度的信息;定义AP模组发送给MCU模组的字节格式;定义MCU模组发送给AP模组的字节格式。一种车载MCU模组与AP模组之间的通信方法可以将车辆电子控制系统的相关功能整合至车载操作系统,将汽车电子控制系统的功能和娱乐功能整合在一起,实现车主享受娱乐的同时对车辆电子进行部分控制,比如,及时响应车主对车辆方向盘上按键的操作、调节车辆空调相关的设置、控制车辆相关的辅助灯以及对车辆相关状态信息的多方式展示和提醒等。展示和提醒等。展示和提醒等。
技术研发人员:方孝生
受保护的技术使用者:宁波波导易联电子有限公司
技术研发日:2022.03.22
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。