1.本发明涉及无人机辅助通信领域,具体涉及一种非正交多址接入网络中无人机辅助通信的方法。
背景技术:
2.近年来,随着无线通信技术的飞速发展,传统的蜂窝通信网络在提高网络容量、扩大网络覆盖及提升服务质量方面都面临着巨大的挑战。在实际通信应用中,现阶段常用的地面基站面临着亟待解决的痛点。例如,在偏远地区或地势险峻的地区部署地面基站存在着基建难度大成本高的问题;基站与用户之间的信道链路存在着信号衰减严重的通信质量问题;地面基站由于自然灾害等原因被损坏后无法正常运作的问题等。为了增强网络覆盖范围,按照需求随时进行网络部署,无人机(unmanned aerial vehicle,uav)辅助的无线通信进入了人们的视野,被视为是解决地面移动通信系统所面临问题的有效方法。
3.非正交多址接入技术(non-orthogonal multiple access,noma)的提出,源于第五代移动通信系统(5th generation,5g)对于同一时间支持更多用户连接的需求,传统的正交多址接入(orthogonal multiple access,oma)方式已经不能满足5g中爆炸性增长的用户接入请求,而noma技术不仅可以容纳更多的用户数量,还可以提高频谱的利用率。其中功率域的noma通过给不同信道增益的用户在同一个时频资源上发送不同功率的信号使资源得到复用,在用户端通过连续干扰消除(successive interference cancellation,,sic)技术得到用户各自的信息,这一技术的应用,可以大幅度提升用户的解码能力。值得指出的是,只有当各用户与发射端的信道差异较大时,noma方式才能获得比传统的oma方式更好的频谱效率增益。由于无人机可以动态调整自身飞行轨迹,动态优化各用户的信道增益,因此,无人机与非正交多址的结合可以更好的发挥出noma方式的优势。
技术实现要素:
4.针对无人机辅助通信网络中用户容量和无人机功耗的问题,本发明提出在无人机辅助通信网络引入noma技术,联合无人机的用户调度,通信功率以及飞行参数来有效提高系统的用户容量和无人机的能量效率。
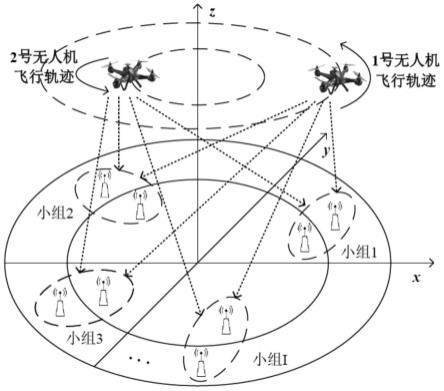
5.本发明的技术方案如下:一种非正交多址接入网络中无人机辅助通信的方法,包括无人机与地面物联网节点。
6.两架无人机作为空中基站,以固定高度和飞行周期飞行在对应地面目标区域上空,为地面物联网节点提供服务,飞行周期被分解为n个时隙;每个时隙应足够小,以保证无人机在每个时隙都可以看作是相对静止的。
7.地面目标区域被划分为内圆和圆环两个区域,内圆和圆环面积相等;地面物联网节点均匀分布在地面目标区域之中,且内圆区域的节点和圆环区域的节点两两配对,构成i组非正交多址接入组;通过对内圆和圆环区域内的节点进行合理分组,联合优化无人机的用户调度,发射功率与飞行参数,最大化无人机总体的能量效率。
8.具体包括以下步骤:
9.步骤一:根据实际情况构建无人机辅助的非正交多址接入网络系统模型,包括网络信道模型、非正交多址接入分组模型和无人机运动模型等;在网络信道模型的条件下,对节点进行非正交多址接入分组,根据无人机运动模型,确定无人机的动态轨迹,为地面非正交多址接入组提供通信服务;
10.步骤二:设计优化问题,最大化无人机总体的能量效率,满足无人机飞行的运动学约束、无人机与各节点间相对位置约束、无人机飞行区域约束,以及各节点的最小通信速率约束;
11.步骤三:将优化问题分解为三个非凸的子问题,利用拉格朗日乘子法和连续凸近似方法将非凸的子问题转换为凸问题后,放入matlab中的cvx工具箱求解。
12.所述步骤一中网络信道模型具体为:第m架无人机到第i组非正交多址接入组的第j个地面物联网节点的信道增益表示为h
m,i,j
(n),其中i=1,2,
…
i,n=1,2,
…
n,m=1代表飞行在圆环区域上空的无人机,m=2代表飞行在内圆区域上空的无人机,j=1代表在圆环区域的节点,j=2代表在内圆区域的节点;考虑到无人机到节点之间的信道为视距信道,因此采用自由空间衰落模型来模拟该信道,即
[0013][0014]
其中,β0表示单位距离1米处的信道增益,d
m,i,j
(n)表示第m架无人机到第i组非正交多址接入组的第j个地面物联网节点的距离,qm(n)表示第m架无人机在第n个时隙的位置,q
i,j
表示第i组非正交多址接入组的第j个地面物联网节点所在的位置。
[0015]
所述步骤一中的非正交多址接入分组模型具体为:
[0016]
将地面目标区域划分为四个象限,计算每个象限中圆环区域内的节点与内圆区域内的节点之间的距离,距离信息存储至矩阵d中,矩阵d的第a行第b列元素代表了沿逆时针方向内圆区域的第a个节点与圆环区域的第b个节点的距离;
[0017]
[d
ord
,l]=sort(d)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0018]
其中,sort(.)是对矩阵中每一列元素进行降序排列,将排序结果存入d
ord
中,并将排序之后d
ord
中各元素所对应的内圆节点标号存放在l中的对应位置上;
[0019]
从矩阵l的第一行开始遍历,第一行所有列中内圆节点标号无重复出现时,将沿逆时针方向圆环区域的第i个节点与内圆区域的第l(1,i)个节点配对;
[0020]
出现重复的内圆节点标号时,记录未重复内圆节点标号的位置,沿逆时针方向圆环区域的第w个节点与内圆区域的第l(1,w)个节点配对,其中,w表示无重复标号的列;再记录重复的内圆节点标号所在位置,比较d
ord
中对应位置距离数值大小,选择其中对应距离数值最大的元素,记录其所在列号e,沿逆时针方向圆环区域的第e个节点与内圆区域的第一个节点配对;配对完成后去除l中第w列和第e列元素,继续从l的下一行开始遍历,遵循第一次遍历过程的规则,直到所有节点配对完成。
[0021]
所述步骤一中无人机运动模型具体包含三个部分,一是无人机飞行的运动学约束,二是无人机飞行区域约束,三是无人机能量消耗;无人机各个时隙的位置坐标和速度满足以下运动学约束:
[0022][0023][0024]
其中,qm(n)表示第n个时隙第m架无人机的位置坐标,am(n)表示第n个时隙第m架无人机的加速度,vm(n)表示第n个时隙第m架无人机的飞行速度,δ
t
表示每个时隙的时间长短;
[0025]
两架无人机分别飞行在内圆和圆环区域上空,无人机的飞行范围约束为
[0026]rin
≤d
m,z
(n)≤r
out
,m=1
ꢀꢀꢀ
(5)
[0027]dm,z
(n)≤r
in
,m=2
ꢀꢀꢀ
(6)
[0028]
其中,d
m,z
(n)表示在高度h的情况下,第m架无人机到区域中心轴z轴的距离;r
in
表示内圆的半径;r
out
表示整个地面目标区域的半径;
[0029]
无人机的飞行周期是固定的,无人机一个周期的初始位置和终止位置相同,同时无人机之间避免发生碰撞,引入了防碰撞条件,以上两个条件表示为
[0030][0031][0032]
其中,d
min
表示保持无人机安全飞行的最小安全距离;如果无人机之间的距离小于d
min
,则会发生碰撞,导致系统无法正常运行。
[0033]
无人机能量消耗包含两个部分,一是无人机通信功率的消耗,二是无人机推进功率的消耗;在第n个时隙,第m架无人机为第i个非正交多址接入组中第j个节点付出的通信功率为p
m,i,j
(n);在单位带宽情况下,各非正交多址接入组的通信速率为
[0034][0035][0036]
其中,σ2表示信道噪声功率;
[0037]
第m架无人机在一个飞行周期内的总吞吐量以及系统的总吞吐量分别为
[0038][0039]rtotal
=r1 r2ꢀꢀꢀ
(12)
[0040]
其中,u
m,i
(n)是一个二进制离散变量,用于表示用户调度,其等于0时,代表第m架无人机此时没有和第i个非正交多址接入组进行通信,其等于1时,表示第m架无人机此时正在和第i个非正交多址接入组进行通信;
[0041]
无人机在一个时隙内的推进功率为
[0042][0043]
其中,c1和c2是两个常系数,与空气密度和无人机自身的硬件有关;g表示重力加速度,vm(n)则表示第m架无人机在第n个时隙的飞行速度,am(n)则表示第m架无人机在第n个时隙的加速度;
[0044]
第m架无人机在一个飞行周期内的能量消耗以及系统的总能量消耗分别为
[0045][0046]etotal
=e1 e2ꢀꢀꢀ
(15)
[0047]
为了最大化无人机总体的能量效率,所述优化问题为
[0048][0049][0050][0051][0052][0053][0054][0055][0056][0057]
||am(n)||≤a
max
ꢀꢀꢀ
(15j)
[0058][0059]
const.(3),(4),(5),(6),(7),(8)
ꢀꢀꢀ
(15l)
[0060]
其中,(15b)和(15c)表明调度约束,每个时隙内,每个noma组在一个时隙只能与一架无人机进行通信,同时一架无人机在一个时隙也只能为一个noma组提供服务。(15e)和(15f)保证无人机至内圆和圆环区域内节点距离不同;从而可以通过noma方式复用大小不同的发射功率进行信息传输。(15g)和(15h)对无人机的发射功率做出了一定的限制,(15i)和(15j)对无人机的速度和加速度做出了限制,使无人机能够合理的飞行,(15k)保证了每个节点的通信速率不低于设置的最低门限。p
max
代表无人机能供发射的最大传输功率,v
min
和v
max
代表无人机的最小和最大飞行速度,a
max
代表无人机最大的飞行加速度,r
min
表示每个节点的最低通信速率门限。
[0061]
进一步地,步骤二中提出的优化问题是混合整数分式的非凸优化问题,难以直接进行求解。因此,在步骤三中,首先将原问题分解为了三个子问题,即单独优化无人机的用户调度、无人机的通信功率以及无人机的飞行参数。之后通过引入辅助变量,应用拉格朗日乘子法、连续凸近似(successive convex approximation,sca)方法将三个子问题转换为可以直接求解的凸优化问题,并设计了交替优化的迭代算法,使用cvx工具箱,逐渐逼近优化问题的解。
oma)方案进行比较。为了说明轨迹优化对于系统能效的提升,将不优化轨迹的结果带入比较,图5可以看出,轨迹优化对于总体能效的提升是很明显的。同时,本发明相较于uav-oma方案,有着更高的能量效率,具有很高的应用价值。
[0074]
以上所述实施例仅表达本发明的实施方式,但并不能因此而理解为对本发明专利的范围的限制,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。