技术特征:
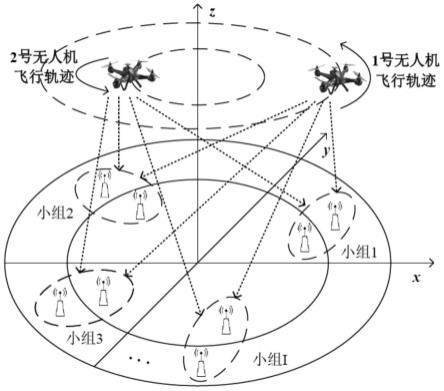
1.一种非正交多址接入网络中无人机辅助通信的方法,其特征在于,所述非正交多址接入网络包括无人机与地面物联网节点;两架无人机作为空中基站,以固定高度和飞行周期飞行在对应地面目标区域上空,为地面物联网节点提供服务,飞行周期被分解为n个时隙;地面目标区域被划分为内圆和圆环两个区域,内圆和圆环面积相等;地面物联网节点均匀分布在地面目标区域之中,且内圆区域的节点和圆环区域的节点两两配对,构成i组非正交多址接入组;通过对内圆和圆环两个区域内的节点进行分组,联合优化无人机的用户调度、发射功率与飞行参数,最大化无人机总体的能量效率,具体包括以下步骤:步骤一:构建无人机辅助的非正交多址接入网络系统模型,包括网络信道模型、非正交多址接入分组模型和无人机运动模型,在网络信道模型的条件下,对节点进行非正交多址接入分组,根据无人机运动模型,确定无人机的动态轨迹,为地面非正交多址接入组提供通信服务;步骤二:设计优化问题,最大化无人机总体的能量效率,满足无人机飞行的运动学约束、无人机与各节点间相对位置约束、无人机飞行区域约束,以及各节点的最小通信速率约束;步骤三:将优化问题分解为三个非凸的子问题,利用拉格朗日乘子法和连续凸近似方法将非凸的子问题转换为凸问题后,进行求解。2.根据权利要求1所述的非正交多址接入网络中无人机辅助通信的方法,其特征在于,所述步骤一中网络信道模型具体为:第m架无人机到第i组非正交多址接入组的第j个地面物联网节点的信道增益表示为h
m,i,j
(n),其中i=1,2,...i,n=1,2,...n,m=1代表飞行在圆环区域上空的无人机,m=2代表飞行在内圆区域上空的无人机,j=1代表在圆环区域的节点,j=2代表在内圆区域的节点;其中,β0表示单位距离1米处的信道增益,d
m,i,j
(n)表示第m架无人机到第i组非正交多址接入组的第j个地面物联网节点的距离,q
m
(n)表示第m架无人机在第n个时隙的位置,q
i,j
表示第i组非正交多址接入组的第j个地面物联网节点所在的位置。3.根据权利要求1所述的非正交多址接入网络中无人机辅助通信的方法,其特征在于,所述步骤一中的非正交多址接入分组模型具体为:将地面目标区域划分为四个象限,计算每个象限中圆环区域内的节点与内圆区域内的节点之间的距离,距离信息存储至矩阵d中,矩阵d的第a行第b列元素代表了沿逆时针方向内圆区域的第a个节点与圆环区域的第b个节点的距离;[d
ord
,l]=sort(d)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中,sort(.)是对矩阵中每一列元素进行降序排列,将排序结果存入d
ord
中,并将排序之后d
ord
中各元素所对应的内圆节点标号存放在l中的对应位置上;从矩阵l的第一行开始遍历,第一行所有列中内圆节点标号无重复出现时,将沿逆时针方向圆环区域的第i个节点与内圆区域的第l(1,i)个节点配对;
出现重复的内圆节点标号时,记录未重复内圆节点标号的位置,沿逆时针方向圆环区域的第w个节点与内圆区域的第l(1,w)个节点配对,其中,w表示无重复标号的列;再记录重复的内圆节点标号所在位置,比较d
ord
中对应位置距离数值大小,选择其中对应距离数值最大的元素,记录其所在列号e,沿逆时针方向圆环区域的第e个节点与内圆区域的第一个节点配对;配对完成后去除l中第w列和第e列元素,继续从l的下一行开始遍历,遵循第一次遍历过程的规则,直到所有节点配对完成。4.根据权利要求1所述的非正交多址接入网络中无人机辅助通信的方法,其特征在于,所述步骤一中无人机运动模型具体包含三个部分,一是无人机飞行的运动学约束,二是无人机飞行区域约束,三是无人机能量消耗;无人机各个时隙的位置坐标和速度满足以下运动学约束:动学约束:其中,q
m
(n)表示第n个时隙第m架无人机的位置坐标,a
m
(n)表示第n个时隙第m架无人机的加速度,v
m
(n)表示第n个时隙第m架无人机的飞行速度,δ
t
表示每个时隙的时间长短;两架无人机分别飞行在内圆和圆环区域上空,无人机的飞行范围约束为r
in
≤d
m,z
(n)≤r
out
,m=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)d
m,z
(n)≤r
in
,m=2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)其中,d
m,z
(n)表示在高度h的情况下,第m架无人机到区域中心轴z轴的距离;r
in
表示内圆的半径;r
out
表示整个地面目标区域的半径;无人机一个周期的初始位置和终止位置相同,同时无人机之间避免发生碰撞;人机一个周期的初始位置和终止位置相同,同时无人机之间避免发生碰撞;其中,d
min
表示保持无人机安全飞行的最小安全距离;无人机能量消耗包含两个部分,一是无人机通信功率的消耗,二是无人机推进功率的消耗;在第n个时隙,第m架无人机为第i个非正交多址接入组中第j个节点付出的通信功率为p
m,i,j
(n);在单位带宽情况下,各非正交多址接入组的通信速率为(n);在单位带宽情况下,各非正交多址接入组的通信速率为其中,σ2表示信道噪声功率;第m架无人机在一个飞行周期内的总吞吐量以及系统的总吞吐量分别为r
total
=r1 r2ꢀꢀꢀꢀꢀꢀꢀ
(12)其中,u
m,i
(n)是一个二进制离散变量,用于表示用户调度,其等于0时,代表第m架无人
机此时没有和第i个非正交多址接入组进行通信,其等于1时,表示第m架无人机此时正在和第i个非正交多址接入组进行通信;无人机在一个时隙内的推进功率为其中,c1和c2是两个常系数,g表示重力加速度,v
m
(n)则表示第m架无人机在第n个时隙的飞行速度,a
m
(n)则表示第m架无人机在第n个时隙的加速度;第m架无人机在一个飞行周期内的能量消耗以及系统的总能量消耗分别为e
total
=e1 e2ꢀꢀꢀꢀꢀ
(15)。5.根据权利要求1所述的非正交多址接入网络中无人机辅助通信的方法,其特征在于,所述优化问题为所述优化问题为所述优化问题为所述优化问题为所述优化问题为所述优化问题为所述优化问题为所述优化问题为所述优化问题为||a
m
(n)||≤a
max
ꢀꢀꢀꢀ
(15j)const.(3),(4),(5),(6),(7),(8)
ꢀꢀꢀꢀ
(15l)其中,(15b)和(15c)表明,每个时隙内,限定一个非正交多址接入组与一架无人机互相通信服务;(15e)和(15f)表明无人机至内圆和圆环区域内节点距离不同;p
max
代表无人机能供发射的最大传输功率,v
min
和v
max
代表无人机的最小和最大飞行速度,a
max
代表无人机最大的飞行加速度,r
min
表示每个节点的最低通信速率门限。
技术总结
本发明属于无人机辅助通信领域,提供了一种非正交多址接入网络中无人机辅助通信的方法,所述网络包括无人机与地面物联网节点;无人机作为空中基站为地面节点提供服务;地面目标区域被划分为内圆和圆环两个区域,地面节点均匀分布在目标区域之中。通过对两个小区域内的节点进行合理分组,联合优化无人机的用户调度,发射功率与飞行参数,最大化无人机总体的能量效率。通过与无人机辅助正交多址接入方案对比,本发明可以显著提高系统的能量效率,具有较高的应用价值。有较高的应用价值。有较高的应用价值。
技术研发人员:刘鑫 刘泽辰 张雪研 邹德岳
受保护的技术使用者:大连理工大学
技术研发日:2022.03.04
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。