1.本发明总体上涉及医疗装置的领域。
2.更具体地,本发明涉及一种用于经口气管插管的喉镜。
背景技术:
3.经口气管插管包括将气管内管放置在气道内,以允许对患者进行机械或手动通气,并且保护肺部免受胃部物质或来自上气道的物质的回流。
4.在当前技术状态下,气管内管借助于以下操作之一来被放置在患者的气管中:
[0005]-直接喉镜检查:使用喉镜(例如macintosh喉镜)来抬升解剖结构(咽部、喉部),并且允许观察声带并进入气道以插入气管内管;直接喉镜检查可能导致水肿(因此肿胀)和阻塞气道;直接喉镜插管必须由特别有经验的医生(通常是麻醉师)进行,并且需要对患者进行特殊的准备;
[0006]-视频喉镜检查:包括使用带有远程视觉系统的喉镜,其允许进行该操作的医生在外部屏幕上观察更深的解剖部位;这种技术简化了由直接喉镜检查进行插管的操作,并且使插管更安全、创伤更小,但仍受到直接喉镜检查进行插管的许多局限性的影响;
[0007]-使用柔性纤维镜的喉镜检查:该手术包括将纤维镜插入到气道中,并且使用纤维镜作为引导件,气管内管在该引导件上滑动,以完成插管;这种手术非常安全,并且克服了直接喉镜检查的局限性,但是需要非常有经验的人员和昂贵的装置(纤维镜),而这些装置并不总是可用的。
技术实现要素:
[0008]
本发明旨在提供一种克服现有技术的问题的用于经口气管插管的喉镜。
[0009]
根据本发明,该目的通过一种用于经口气管插管的喉镜来实现,该喉镜具有形成权利要求1所述主题的特征。
[0010]
权利要求形成了本文提供的与本发明相关的公开内容的组成部分。
[0011]
正如在以下详细描述的过程中将变得清楚的那样,根据本发明的喉镜包括具有可定向的头部的管状主体,该可定向的头部沿着解剖结构的曲率通过口部插入到咽部中,直至其到达喉部和声带。头部可以配备有可以连接到外部屏幕的照明和显示系统(摄像机)。头部可以借助于致动器来定向,使得它可以指向气道的入口。一旦观察到气道并且对准起到,那么气管内管就使用喉镜的管状主体作为引导件经过气道而插入。
[0012]
喉镜的管状主体可以设置有放置在头部的前壁上的可移动元件,以允许在会厌妨碍视觉和接近声带的情况下抬升会厌。
[0013]
管状主体可以设置有用于流体(例如用于输送气体或药物或用于抽吸分泌物)的通道,或用于视觉系统的线缆的通道。
[0014]
由于指向性的头部,根据本发明的喉镜的管状主体允许克服与经口气管插管有关的许多困难,并且在插管困难的情况下或在不存在正常喉镜检查条件的不利环境中进行插
管的情况下,特别有效。
附图说明
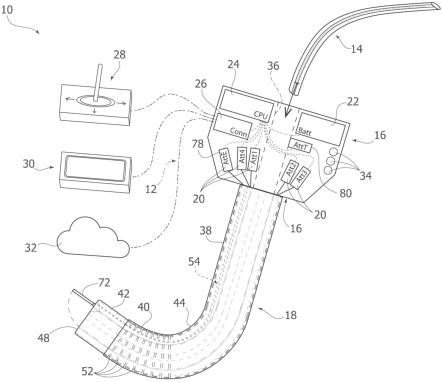
[0015]
现将参考附图详细描述本发明,附图仅通过非限制性示例的方式给出,其中:
[0016]
图1是根据本发明的使用喉镜进行经口气管插管的系统的示意图,
[0017]
图2是图1的喉镜的局部示意性侧视图,
[0018]
图3是沿着图2的线iii-iii的示意性横截面图,
[0019]
图4是图2中箭头iv所示细节的示意图,
[0020]
图5是根据图2的箭头v的侧视图,
[0021]
图6是示出被插入到患者气管中的根据本发明的喉镜的示意图,
[0022]
图7和图8是示出根据本发明的喉镜的主要特征尺寸的侧视图,
[0023]
图9和图10是沿着图7的线ix-ix和x-x的横截面图,其示出了根据本发明的喉镜的主要特征尺寸,并且
[0024]
图11是示出由图7中箭头xi所示元件的主要特征尺寸的前视图。
具体实施方式
[0025]
参考图1,数字10整体表示用于对患者进行经口气管插管的系统。系统10包括喉镜12,该喉镜被构造成通过穿过口部和喉部而被插入到患者的气管中。喉镜12被构造成引导气管内管14的插入。
[0026]
喉镜12包括基部16和具有大致j形的管状主体18。管状主体18可以可移除地固定到基部16上。
[0027]
基部16在其中承载多个致动器20。致动器可以是由电池22供电并且由电子控制单元24控制的电动致动器。或者,致动器20可以是机械致动器。
[0028]
电子控制单元24可以连接到接口单元26,该接口单元连接到基部16外部的运动控制装置28,该运动控制装置例如包括操纵杆。接口单元26也可以连接到显示器30。接口单元26与运动控制装置28以及显示器30之间的连接可以使用线缆来实现。
[0029]
在可能的实施例中,接口单元26可以设置有无线通信协议,该无线通信协议允许连接到无线通信网络32,该无线通信网络可以包括因特网。在这种情况下,运动控制系统28和显示器30可以经由无线通信网络32连接到接口单元26和电子控制单元24。
[0030]
喉镜12的基部16可以包括多个流体连接器34。基部16可以设置有通孔36,该通孔被配置用于气管内管14的通过。
[0031]
参考图2,管状主体18包括近侧部分38、可变形部段40和头部42。近侧部分38可以以可释放的方式固定到基部16。近侧部分38可以具有邻近基部16的笔直管道,并且可以借助于不可变形的曲形管道44连接到可变形部段40。
[0032]
管状主体18具有在管状主体18的相反端部之间连续延伸的中心通道46。在管状主体18的近侧端部处,中心通道46与基部16的通孔36连通,并且该中心通道在相反端部处在头部42的前表面48上打开。管状主体18的中心通道46被构造成接收和引导气管内管14。
[0033]
参考图3,在横截面中,管状主体18可以具有带有多个凸起和凹陷的外轮廓。中心通道46可以具有圆形横截面。管状主体18可以具有由薄壁管状护套形成的外罩50。
[0034]
管状主体18的可变形部段40可以具有多个横向切口52(图2),其减小了管状主体18的整个横截面并且形成允许可变形部段40弹性弯曲的弱化区域。可变形部段40的弹性变形允许头部42在穿过头部42的纵向轴线的任何平面中倾斜。
[0035]
头部42借助于沿着管状主体18延伸的传输系统54连接到位于基部16中的致动器20。在可能的实施例中,传输系统54包括多个鲍登线缆56,每个鲍登线缆都包括内部容纳有滑动线缆的引导护套。鲍登线缆56的内线缆在其远侧端部处锚定到头部42。基部16的每个致动器20与相应的鲍登线缆56相关联。借助于运动控制装置28控制的致动器20被构造成控制线缆在相应的护套内的纵向运动。由于可变形部段40的弹性变形,由致动器20控制的线缆的轴向运动改变头部42的倾斜。
[0036]
参考图3,控制头部42倾斜的鲍登线缆56可以布置在管状主体18的外凸起轮廓的相应的凹陷内。在可能的实施例中,可以提供四根鲍登线缆56,所述四根鲍登线缆布置在正方形的顶点处,该正方形的中心与管状主体18的重心重合。线缆56的张紧仅导致可变形部段40的变形。为此,形成近侧部分38和头部42的材料可以是半刚性塑料材料。由于材料的可变形性以及由横向切口52产生的部段的弱化,可以获得可变形部段40的弹性可变形性。
[0037]
参考图3,沿着正方形的同一侧布置的两根线缆56的同时张紧导致头部42在张紧线缆所在侧的方向上倾斜。例如,沿着正方形的上水平侧定位的两根线缆的同时张紧导致头部42的向上倾斜;沿着正方形的右侧布置的两根线缆56的张紧导致头部42的向右的倾斜,等等。单根线缆56的张紧导致头部42沿着正方形的对角线倾斜。例如,位于正方形的右上角的线缆56的张紧导致头部向上和向右的倾斜;位于左下方的线缆56的张紧导致头部42向下和向左倾斜,等等。
[0038]
参考图4,喉镜12包括布置在头部42的前表面48上的视觉系统58。视觉系统58包括光学传感器60(例如ccd传感器)、透镜62和镜子64。透镜62将视野聚焦在镜子64上,并且镜子64将图像反射到光学传感器60上。这种布置使得可以将前方视野引导到被包括在中心通道46的中心至相对于头部42的前壁48向前大约5-6cm之间的区域中。视觉装置58还可以包括光辐射源66(例如led),以照亮视觉装置58的视野。光学系统60和光辐射源66借助于线缆连接到基部16,该线缆可以在形成在管状主体18中的通道68内延伸。由光学传感器60检测到的图像可以通过电子控制单元24处理,并且可以经由接口单元26发送到外部显示器30。
[0039]
参考图3,管状主体18可以包括多个用于流体通过的通道70,这些通道连接到基部16的相应的连接器34。通道70在头部42的前端48上打开,并且平行于管状主体18的纵向轴线延伸至基部16。流体通道70可以用于抽吸分泌物和/或施用药物或氧气。基部16的连接器34可以连接到抽吸源、用于施用氧气的加压容器,或者它们可以连接到用于施用药物的装置。
[0040]
参考图2和图5,喉镜12可以包括会厌72的抬升元件,该抬升元件可以由薄的u形板形成。会厌72的抬升元件借助于两个铰链74铰接到头部42的前壁48,并且可以在降低位置(图5)和升高位置(图2)之间移动,在降低位置,抬升元件与头部42的前壁48接触,在升高位置,元件72基本垂直于头部42的前表面48。
[0041]
参考图3,管状主体18可以包括两个鲍登线缆76,所述鲍登线缆被布置成控制会厌72的抬升元件在降低位置和升高位置之间的运动,反之亦然。鲍登线缆76可以连接到位于基部16中的相应的致动器78(图1),该致动器可以借助于运动控制装置28来控制。
[0042]
参考图1,基部16可以进一步包括另一个致动器80,该致动器被构造成控制气管内管14的插入。例如,致动器80可以驱动齿轮,该齿轮与形成在气管内管14的外表面上的齿条啮合。致动器80也可以由运动控制装置28控制。气管内管14的插入可以在自动或半自动模式下进行。
[0043]
参考图6,管状主体18被插入到患者的口部中,会厌抬升元件72最初处于降低位置。管状主体18逐渐插入喉部中,并且在插入期间,医生借助于运动控制装置28控制头部42的倾斜,以找到气管的正确开口。当装置处于用于进行会厌抬升操作的适当位置时,操作致动器78,该致动器通过张紧线缆76来致使会厌72的抬升元件的抬升。
[0044]
显示器30上示出的图像允许医生根据需要来调节头部42的倾斜,以使其与气管的口部对齐。
[0045]
当头部42被正确地插入到气管中时,气管内管14插入到管状主体18中。通道46引导气管内管14的插入。当气管内管14已经插入到患者的气管中时,抽出管状主体18,从而将气管内管14留在适当位置。
[0046]
在可能的实施例中,运动控制装置28和显示器30可以相对于喉镜12处于远程位置,并且可以经由因特网连接到喉镜12的电子控制单元24。由喉镜12的光学传感器60检测到的图像经由因特网传输到显示器30,并且医生可以远程地控制管状主体18的头部42的运动。
[0047]
专家医生远程控制头部42的定向的可能性能够使喉镜12的管状主体18插入到患者的气管中,也能够由不具备对患者进行插管的资格的人员来进行。例如,在紧急条件下,急救人员可能不包括有资格进行插管操作的医生(例如,麻醉师)。在这种情况下,急救人员可以将喉镜放入患者的咽喉中,用带子将其固定到患者的头部,并且有资格进行插管操作的医生可以远程控制最精细的操作,以允许急救人员正确地为患者插管。
[0048]
管状主体18可以由具有医疗装置使用认证的塑料材料制成,并且可以在生产过程期间或之后进行消毒。管状主体18的外表面可以是光滑的,以减少插入步骤期间的阻力。
[0049]
根据患者的特征,管状主体18可以制成不同的大小。
[0050]
参考图7-11,管状主体18的主要特征测量值可以包括在下表所示的范围内。
[0051]
管状主体-图7,8
[0052]
l1:15-45mm笔直远侧管道长度
[0053]
l2:55-180mm近侧部分长度
[0054]
l3:8-40mm头部长度
[0055]
a1:0
°‑
43
°
最终部分角度
[0056]
a2:60
°‑
105
°
初始部分角度
[0057]
r1:30-55mm角度a1的部段半径
[0058]
r2:35-85mm角度a2的部段半径
[0059]
d1:12-40mm管状主体的外径
[0060]
d2:10-40mm头部的外径
[0061]
a3:60
°‑
95
°
主体-头部轴线角度
[0062]
a4:0
°‑
30
°
头部设备轴线向上运动的立体半角
[0063]
a5:0
°‑
25
°
头部设备轴线向下运动的立体半角
[0064]
头部部段
–
图9
[0065]
f1,f2,f3:0.5-6mm服务通道孔的直径
[0066]
f4:1-8mm视觉系统孔径
[0067]
f5:10-28mm中心通道直径
[0068]
f6,f7,f9,f10:0.5-4mm用于头部运动线缆的孔的直径
[0069]
f8,f11:0.5-2mm用于会厌抬升线缆的孔径
[0070]
主体部段-图10
[0071]
d3,d5,d7:0.5-6mm用于服务管的通道的直径
[0072]
s1,s3,s5:0.1-3mm服务管的厚度
[0073]
d4,d5,d9,d10:0.8至2.6mm头部运动管的直径
[0074]
s2,s4,s7,s8:0.1至3mm头部运动管的厚度
[0075]
d8,d10:0.8-2.6mm会厌抬升运动管的直径
[0076]
s6,s9:0.1-3mm会厌抬升运动管的厚度
[0077]
d12:10-28mm中心通道直径
[0078]
s10:0.1-3mm中心通道厚度
[0079]
s11:0.5-4mm管状主体的外壁厚度
[0080]
s12:0.1-3mm外护套厚度
[0081]
会厌抬升元件-图11
[0082]
l4:12-40mm元件宽度
[0083]
l5:0-30mm下扁平部分的宽度
[0084]
l6:6-24mm开口部分宽度
[0085]
l7:6-24mm开口部分长度
[0086]
l8:10-38mm元件长度
[0087]
l9:12-40mm元件长度(包括铰链)
[0088]
当然,在不损害本发明的原理的情况下,构造和实施例的细节可以相对于所描述和示出的那些而广泛变化,从而不脱离由所附权利要求限定的本发明的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。