通过抖动减少谐波失真
1.在先申请
2.本技术要求享有2019年10月13日提交的第62/914,487号美国临时专利申请的的优先权,其通过引用全部结合至此。
3.在先申请,即2019年10月12日提交的第16/600,496号美国申请号,其通过引用全部结合至此。
技术领域
4.本发明一般涉及信号处理,该信号处理产生基本上无误差的信号,该信号保持相对于恒定基频的振幅和相位,同时允许载波频率变化。
背景技术:
5.载波频率在本文中定义为输出数字信号脉冲的相应瞬时频率。基频在本文中被定义为由不动或恒定相位信号描述的中心频率。众所周知,信号中的任何相位变化也构成频移。在这种情况下,这是通过载波频率偏离基频来实现的。为了保持与用于相控阵元件的输入的兼容性,该方法的输入数据被认为是脉宽调制的相位和占空比。这是相对于作为基频的固定源的稳定参考信号来测量的。
6.相控阵系统依赖于产生精确的载波频率来运行。为了简化系统,通常假设在所有相关时间发射载波频率,以便可以将系统视为时不变的。这种时间不变性对于将阵列元件换能器的输入信号视为复数值是必要的。
7.在所有相关时间生成具有给定相位偏移的恒定频率脉宽调制(pwm)数字信号是微不足道的。但是改变相控阵系统的状态通常涉及改变元件的相位角,这违反了时不变性要求。这会导致许多副作用,包括频率变化。由于数字信号生成假定基频(相对于指定原始相位角的频率)在所有相关时间都等于载波频率,这会导致输出到每个阵列元件换能器的数字信号出现误差。因此,有必要开发一种能够使用自由选择幅度和相位来产生数字信号的信号生成系统。这用于产生基本上无误差的信号,该信号保持相对于恒定基频的幅度和相位,同时允许载波频率变化。
技术实现要素:
8.生成表示为高阶多项式插值评估的相位上采样的硬件高效方法是新颖的。
9.其目的是产生一个尊重并正确解释频率变化的pwm输出,同时还保留绝对相位和相位变化。在不失一般性的情况下,这种技术也可以用相位延迟来重述,该相位延迟从所述技术的角度产生“符号翻转”。
附图说明
10.附图与下面的详细描述一起被并入并构成说明书的一部分,其中类似的附图标记在各个单独的视图中指代相同或功能相似的元件,用于进一步说明包括所要求保护的发明
的概念的实施例,并解释这些实施例的各种原理和优点。
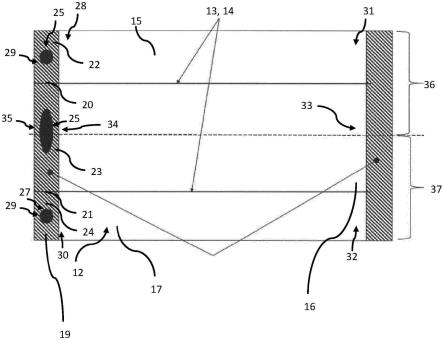
11.图1显示了具有3/2基频的系统的几何行为。
12.图2显示了具有精确基频的系统的几何行为。
13.图3显示了相对于基频具有缓慢增加相位的系统的几何行为。
14.图4显示了相对于基频具有任意相位角函数的系统的几何行为。
15.图5a-5d显示了用于25%占空比线性相位和所公开方法的占空比实现的关键参数的可视化。
16.图6a-6d显示了所公开方法的75%占空比线性相位和占空比实现的关键参数的可视化。
17.本领域普通技术人员将理解,图中的元件是为了简单和清楚而示出的,并且不一定按比例绘制。例如,图中的一些元件的尺寸可能相对于其他元件被夸大以帮助提高对本发明实施例的理解。
18.装置和方法组件在附图中适当地由常规符号表示,仅示出与理解本发明的实施例相关的那些特定细节,以避免用本领域普通技术人员容易理解的细节来掩盖本发明。
具体实施方式
19.i.介绍
20.移动相位角可以被认为是相频调制波的等效公式:
[0021][0022]
其中θ
′
(t)是相位的时间相关函数,ω
′
(t)是频率的时间相关函数。可以看出dθ
′
(t)/dt是载波频率与基频的偏差的量度。这可以通过归一化角度和ω(除以基频和2π弧度,θ现在以转数测量)来简化,得到ω=1。
[0023]
描述相位延迟θ
′
(t)可以通过用多项式内插在后续基频步骤中产生的相位偏移来实现,因为它有利于定义频率并且在端点上是连续的。频率定义为:
[0024][0025]
其中相位角的一阶导数也对瞬时载波频率有贡献,因此形成两个导数约束:
[0026][0027][0028]
角度区间的两个端点也有进一步的约束:
[0029]
θ
′
(0)=θ0.
[0030]
θ
′
(1)=θ1.
[0031]
加上对载波频率的限制,总共有四个。这需要三次多项式插值来实现这种连续性水平。如图所示,定义ω
′
(0)和ω
′
(1)可以使用向后差异来实现,从而限制未来方向所需的
样本数量并减少延迟。这也将所需的立即可用样本的总数从预期信号的相位角和占空比的四个预计算样本减少到三个。
[0032]
由反向差分形成的插值样条多项式的三次形式为:
[0033]
θ
′
(t)=(-θ-1
2θ
0-θ1)t3 (2θ-1-4θ0 2θ1)t2 (θ
0-θ-1
)t θ0,
[0034]
对于每个区间重复。
[0035]
此外,相位也可以由低次多项式表示。尽管这意味着牺牲一些连续性条件,但合理的方法是无论如何都会产生频率不连续性(但重要的是,相位连续性被保留,因为只有相位的时间导数是不连续的)。即使在频率不连续的情况下,使用这种插值的技术也比标准技术具有显著的精度改进。这种方法的线性插值可以表示为:
[0036]
θ
′
(t)=(θ
1-θ0)t θ0.
[0037]
尽管实现的复杂性增加了,但在不失一般性的情况下,同样可以使用更高阶的插值多项式。数字信号的开启时间由占空比描述,假设与信号幅度成正比。这就是“脉宽调制”这一名称的由来。这可以通过在信号的占空比值δ上添加一个插值来实现,该值编码为基频处的脉宽百分比:
[0038]
δ
′
(t)=(δ
1-δ0)t δ0.
[0039]
将进入元件的输出信号定义为数字近似值:
[0040][0041]
因此,相对于基频的时变θ相位偏移也可以视为与基频信号频率ω的偏差,实际上是dθ
′
(t)/dt。要搜索脉冲的位置,必须找到输入到余弦函数的角度的零点(也是2π的倍数)。这些对应于波中的峰值和数字信号中的高点。为了实现这一点,角度和ω都被归一化(除以频率和2π弧度,所有θ现在都以转数计),得到ω=1。因此,正在搜索的条件是:
[0042]
ωt-θ
′
(t)=t-θ
′
(t)=0.
[0043]
这描述了每一步的脉冲中心。
[0044]
为了找到围绕中心点的脉冲范围,计算值|t-θ
′
(t)|。如果它小于表示幅度的给定值,则时间点在脉冲内,在数字信号的高区。否则,时间点在脉冲之外并且在数字信号的低区中。
[0045]
ii.产生合适pwm输出的硬件技术
[0046]
生成表示为高阶多项式插值评估的相位上采样的硬件高效方法也是新颖的。其目的是产生一个尊重并正确解释频率变化的pwm输出,同时还保留绝对相位和相位变化。在不失一般性的情况下,这种技术也可以用相位延迟来重述,该相位延迟从所述技术的角度产生“符号翻转”。
[0047]
移动相位角可以被认为是相频调制波的等效公式:
[0048][0049]
其中θ
′
(t)是相位的时间相关函数,ω
′
(t)是频率的时间相关函数。可以看出dθ
′
(t)/dt是载波频率与基频的偏差的量度。这可以通过归一化角度和ω(除以基频和2π弧度,
θ现在以转数测量)来简化,得到ω=1。
[0050]
描述相位延迟θ
′
(t)可以通过用多项式内插在后续基频步骤中产生的相位偏移来实现,因为它有利于定义频率并且在端点上是连续的。频率定义为:
[0051][0052]
其中相位角的一阶导数也对瞬时载波频率有贡献,因此形成两个导数约束:
[0053][0054][0055]
角度区间的两个端点也有进一步的约束:
[0056]
θ
′
(0)=θ0.
[0057]
θ
′
(1)=θ1.
[0058]
加上对载波频率的限制,总共有四个。这需要三次多项式插值来实现这种连续性水平。如图所示,定义ω
′
(0)和ω
′
(1)可以使用向后差异来实现,从而限制未来方向所需的样本数量并减少延迟。这也将所需的立即可用样本的总数从预期信号的相位角和占空比的四个预计算样本减少到三个。
[0059]
由反向差分形成的插值样条多项式的三次形式为:
[0060]
θ
′
(t)=(-θ-1
2θ
0-θ1)t3 (2θ-1-4θ0 2θ1)t2 (θ
0-θ-1
)t θ0,
[0061]
对于每个区间重复。
[0062]
此外,相位也可以由低次多项式表示。尽管这意味着牺牲一些连续性条件,但合理的方法是无论如何都会产生频率不连续性(但重要的是,相位连续性被保留,因为只有相位的时间导数是不连续的)。即使在频率不连续的情况下,使用这种插值的技术也比标准技术具有显著的精度改进。这种方法的线性插值可以表示为:
[0063]
θ
′
(t)=(θ
1-θ0)t θ0.
[0064]
尽管实现的复杂性增加了,但在不失一般性的情况下,同样可以使用更高阶的插值多项式。数字信号的开启时间由占空比描述,假设与信号幅度成正比。这就是“脉宽调制”这一名称的由来。这可以通过在信号的占空比值δ上添加一个插值来实现,该值编码为基频处的脉宽百分比:
[0065]
δ
′
(t)=(δ
1-δ0)t δ0.
[0066]
将进入元件的输出信号定义为数字近似值:
[0067][0068]
因此,相对于基频的时变θ相位偏移也可以视为与基频信号频率ω的偏差,实际上是dθ
′
(t)/dt。要搜索脉冲的位置,必须找到输入到余弦函数的角度的零点(也是2π的倍数)。这些对应于波中的峰值和数字信号中的高点。为了实现这一点,角度和ω都被归一化(除以频率和2π弧度,所有θ现在都以转数为单位),得到ω=1。因此,正在搜索的条件是:
[0069]
ωt-θ
′
(t)=t-θ
′
(t)=0.
[0070]
这描述了每一步的脉冲中心。
[0071]
为了找到围绕中心点的脉冲范围,计算值|t-θ
′
(t)|。如果它小于表示幅度的给定值,则时间点在脉冲内,在数字信号的高区。否则,时间点在脉冲之外并且在数字信号的低区中。
[0072]
图1到4以几何形式展示了测试这个值小于δ
′
(t)/2是如何产生适当的脉冲的。
[0073]
图1显示了基频3/2的边沿情况下的几何行为400。在该图中,δ为δ(t),y轴410代表归一化角度(以转数计)θ,x轴420代表归一化时间(以基频周期计)t。该图1是相对于由对角相位线440a、440b、440c表示的基频,当应用于缓慢减小的相位(导数为-1/2,负斜率向下和向右)时pwm生成的几何解释。该图中和本文所有其他图中的对角线相位线是在周期域上绘制的,因此如图所示“环绕”这些图。因此,许多明显的不连续性代表相同的曲线。
[0074]
两组重复曲线之间的距离在时间上重复的一些位置450a、450b、450c、450d、450e、450f、450g、450h跨越小于δ/2(定义为占空比量的一半)距离的阈值。这两组曲线是相对于时间线460a、460b、460c、460d、460e的恒定相位(θ=t或者θ=ωt,,但由于ω被归一化为1,所以围绕旋转和基频周期)。它向上和向右移动,表示具有零相位偏移行为的基频。表示期望行为的内插相位曲线(θ
′
(t))对相位440a、440b、440c中该信号的补充。当两条曲线在相位上“匹配”得足够紧密(小于δ/2)时,这些区域代表脉冲信号430的脉冲部分。从δ/2距离因子450a、450b、450c、450d、450e、450f、450g、450h投影的垂直虚线示出了pwm信号430上由于达到δ/2距离因子而引起二进制状态改变的脉冲边沿的地方。
[0075]
在图中向上和向右移动的恒定相位与时间线(θ=t或θ=ωt)表示基频与零相位偏移行为,在基频的每个周期都会重复。垂直方向的重复表明,对于角度的所有整数转数都是正确的。因此,即使考虑用于实现该方法的计数器的数值环绕也是如此。这会生成载波频率是基频的三分之二的pwm信号(其中频率乘数是通过从恒定相位与时间的导数θ=ωt(1)中减去内插相位线的瞬时导数θ
′
(t)(-1/2)得到的,所以1-(-1/2)=3/2)。在底部是最终数字信号430,其将驱动由两组曲线相距小于δ/2距离的所有点组成的元件。
[0076]
图2准确地显示了基频的几何行为500。在该图中,δ为δ(t),y轴510代表归一化角度(以转数计)θ,x轴520代表归一化时间(以基频周期计)t。所示为当应用于相对于由对角相线540a、540b、540c表示的基频不改变的平坦恒定相角θ
′
(t)(在时间上具有零导数的水平线)时产生的pwm的几何解释。
[0077]
距离δ/2 550a、550b、550c、550d、550e、550f再次代表脉冲信号中两个状态之间的过渡点。因此,两条曲线在每个基频周期恰好相交一次,因为内插相位曲线是水平的并且表示恒定的相位角。这将生成载波频率完全等于基频的pwm信号(其中频率乘数是通过从恒定相位与时间的导数θ=ωt(1)中减去内插相位线的瞬时导数θ
′
(t)(0)得到的,所以1-0=1)。虚线表示脉冲信号中的脉冲边沿。在底部是最终数字信号530,其将驱动由两组曲线相距再次小于δ/2距离的所有点组成的元件。
[0078]
图3显示了基频1/2的边沿情况下的几何行为600。在该图中,δ为δ(t),y轴610代表归一化角度(以转数计)θ,x轴620代表归一化时间(以基频周期计)t。距离δ/2650a、650b再次代表脉冲信号中两个状态之间的过渡点。
[0079]
所示为相对于对角线相位线640a、640b、640c所代表的基频,当应用于增加的相位
θ
′
(t)(具有导数1/2)时,pwm生成的几何解释。这会生成载波频率是基频的一半的pwm信号(其中频率乘数是通过从恒定相位与时间的导数θ=ωt(1)中减去内插相位线的瞬时导数θ
′
(t)( 1/2)得到的,所以1-(
±
1/2)=1/2)。在底部是最终数字信号630,其将驱动由两组曲线相距再次小于δ/2距离的所有点组成的元件。
[0080]
图4显示了几何行为700,即梯度和频率随时间显著变化的插值函数示例如何符合该几何描述。在该图中,δ是δ(t),y轴710代表标准化角度(以转数计)θ,x轴720代表标准化时间(以基频周期计)t。所示为相对于对角线相线θ
′
(t)或θ=ωt740a、740b、740c、740d、740e、740f、740g、740h、740j表示的基频,当应用于更任意定义的相角函数时,pwm生成的几何解释。距离δ/2750a、750b、750c、750d、750e、750f、750g、750h、750j、750k、750m、750n、750p、750q、750r、750s、750t、750u、750v、750w再次代表脉冲信号中的边沿。但是在这里,虽然它们在y轴上表示相同的δ/2距离,但它们对应于在x轴上变化的脉冲长度。波浪水平线745a、745b、745c是该示例中的内插相位线θ
′
(t)。
[0081]
θ
′
(t)的导数的变化在以较低频率产生较长脉冲的正导数和以较高频率产生较短脉冲的负导数之间移动。这是由于y轴距离之间的交叉小于δ/2和大于δ/2,改变了它们之间的相对距离。底部是驱动元件的最终数字信号730,其中当信号y轴距离越过δ/2阈值时,会感应出脉冲边沿。
[0082]
还可以证明,当以这种方式使用时,占空比值δ
′
(t)/2与该方案的频率成适当比例。
[0083]
iii.条件测试和抖动
[0084]
为了获得减少的谐波失真,引入抖动以缓解信号离散成精确的数字子区间(ticks)所产生的伪影是有益的。但是为了做到这一点并且不引入进一步的问题,有必要确保每个元件上每个上升和下降脉冲沿上的每个抖动操作是不相关的。这在硬件系统中很难实现,因此需要对方案进行一些重新安排。
[0085]
用计数器获得了θ
′
(t)、δ
′
(t)和t,其中θ
′
(t)和δ
′
(t)(t)可以是任意次数多项式,现在可以使用这些来评估:
[0086]
|t-θ
′
(t)|< δ
′
(t)/2.
[0087]
如前所述,当函数量中允许环绕时,测试驱动脉冲输出发出哪个布尔状态的关键条件何时为真。为了提高硬件系统的效率并单独控制每个脉冲的开始和结束边沿,将它们放入两个计数器中,作为上述测试的负部分和正部分对其应用不同的测试。这可以表示为:
[0088]
和
[0089]
由于只有符号对执行此测试很重要,因此可以向计数器添加一个额外的位,以通过乘以2来消除除数:
[0090]
2t-2θ
′
(t)≥-δ
′
(t)和2t-2θ
′
(t)< δ
′
(t)。
[0091]
然后重新排列计数器以使其成为符号测试:
[0092]-((2t-2θ
′
(t)) δ
′
(t))≤0和(2t-2θ
′
(t))-δ
′
(t)<0,
[0093]-((2t-2θ
′
(t)) δ
′
(t))-ε≤-ε和(2t-2θ
′
(t))-δ
′
(t)<0,
[0094]-((2t-2θ
′
(t)) δ
′
(t))-ε<0和(2t-2θ
′
(t))-δ
′
(t)<0,
[0095]
其中ε的物理表现通常只是最低有效位,并且计数器操作的数字空间被重新设计
以进行签名。
[0096]
因此,可以为这些数量构建两个最终的计数器,其中计数器的符号位表示测试是否成功,这是应用于它们两个符号位的逻辑and运算的结果。一个实施例可以选择对小于50%的占空比(δ
′
(t)≤1/2)使用and运算符,对大于50%的占空比(δ
′
(t)≥1/2)使用逻辑or运算符,其中在50%的占空比下,两个运算符产生相同的结果。当占空比超过50%时,计数器会交换角色,这使情况变得更加复杂,在占空比超过50%时,“开始(begin)”计数器控制下降沿,而“结束(end)”计数器控制上升沿。
[0097]
为简洁起见,以下描述θ
′
(t)和δ
′
(t)的一阶(线性)多项式实现。边沿“开始”和“结束”所需的计数器可以扩展为:
[0098]
begin:=-(((δ
′
1-δ
′0)t δ
′0) (2t-2((θ
′
1-θ
′0)t θ
′0)) ε),
[0099]
end:=-(((δ
′
i-δ
′0)t δ
′0)-(2t-2((θ
′
i-θ
′0)t θ
′0)))
[0100]
因为这是一个线性示例,所以可以通过评估和获取每个计数器的导数并在区间开始时评估以确定要计算的起始值和常数来将这些分解为子计数器。对于更高次多项式,可以使用上一节中描述的计数器,但是对于该线性示例,只需要两个初始化常数和两个导数:
[0101]
begin0:=-(δ
′
0-θ
′0)-ε,
[0102][0103]
end0:=-(δ
′0 θ
′0),
[0104][0105]
和以前一样,将其重写为使用带计数器和位移位的实数字逻辑意味着将区间[0,1)中的t替换为k,其表示自区间开始以来传递的离散ticks。将每个区间的ticks数定义为2
p
,然后生成初始计数器值(假设输入是在区间[0,1),而不是已经是2
p
的分数,这将在区间[0,2
p-1]中):
[0106]
begin0:=-2
2p
(δ
′
0-2θ
′0)-1,
[0107][0108]
end0:=-2
2p
(δ
′0 2θ
′0),
[0109][0110]
其中ε已替换为数字1,即表示中的最小非零值。
[0111]
然后,这些给定的分配是“开始”和“结束”计数器的初始值以及它们各自的增量,这些增量应用于每个数字tick的开始,因为所需的评估是:
[0112][0113][0114]
如前所述,然后将逻辑位运算符应用于“开始”和“结束”的符号位,用于生成脉冲
输出的最终状态。
[0115]
iv.未加权抖动
[0116]
如前所述,由于离散化引入了数字ticks,因此有必要将抖动添加到系统中以改善信号量化的影响。
[0117]
为了减轻量化效应,减少边带并因此减少输出失真,每个脉冲边沿都添加了一个概率抖动。但是由于参数确定边沿位置的方式,当每个区间(或高阶多项式的每个tick)的频率可能随时间不同时,很难添加使边沿位置变化单个tick的抖动。
[0118]
为t中的每个边沿(其交叉和边沿位置由参数确定)添加抖动将需要大量的额外操作(至少是乘法,这将是昂贵的)。这将决定如何在t中以规定的数量移动边沿,可能是通过向可以被视为主要在θ中移动的参数定义的边沿计数器添加加权抖动因子。
[0119]
另一种方法是不对抖动进行加权并将其直接应用于计数器(即使用“未加权”抖动),从而在“相位角”空间θ中进行抖动,而不是直接在时间t中进行抖动。这可以被视为通过在“相位角”轴θ上移动或抖动图1、2、3和4中的曲线之一而不是沿时间轴t移动或抖动曲线来进行抖动。这意味着抖动会通过边沿位置的参数定义进行投影。实际上,这仅意味着当瞬时载波处于较低频率时应用更多抖动,而当瞬时载波处于较高频率时应用较少抖动,因为在这些情况下,θ的移动分别在t中产生更大或更小的移动。
[0120]
为了将此方法添加到方法中的两条边沿上,会产生两个抖动值:一个用于“开始”计数器begin(t),一个用于“结束”计数器end(t)。这些被定义为整数值:
[0121]
begin
δ
:=2(2
p
×
uniformrandom([0,1))),
[0122]
end
δ
:=2(2
p
×
uniformraudom([0,1))),
[0123]
理想情况下,每种情况下的结果是区间[0,2
p 1-1]内均匀分布的随机整数值(但如果实现为线性反馈移位寄存器(lfsr)可以合理地为[1,2
p 1-1])。
[0124]
现在的评价是:
[0125][0126][0127]
其中抖动以相反的符号应用于每个抖动,以免使设备的最终输出偏置。
[0128]
扩展这些begind(t)和endd(t),我们得到:
[0129][0130][0131]
首先,这有效地将相位在每条边沿上移动最多一个tick。其次,由于区间[0,1)上均匀分布的期望值为一半,因此预计这会导致每个脉冲边沿的相位偏置半个样本,但不会偏置占空比。因此,幅度总体上没有被修改。将每个脉冲偏置半个样本,因为系统中的每个元件都由相同的电子设备驱动,因此不会产生影响,因此可以忽略不计。
[0132]
实现这种方法的最后一个复杂之处在于,由于在一个基频周期内可能会出现多个上升或下降边沿,而这些边沿可能会出现在时间线的任何地方。因此,必须仔细选择随机抖动值begin
δ
和end
δ
变化的时间。有必要找到一种方法来重新初始化每个随机抖动值begin
δ
和end
δ
,并且在可以保证边沿不会下降的时间。这确保了如果抖动量在与修改边沿下降位置相同的时钟周期内修改,则不会出现可能导致杂散脉冲的竞争条件。不允许将相同的抖动值应用于多个边沿也是不可取的,因为它会使这些边沿相关联。
[0133]
实现这一点的系统可以保证抖动值begin
δ
和end
δ
的跳跃并且不会影响最终的脉冲形状。这发生在计数器周期的部分期间,其中每个计数器的最高有效位将它们置于其符号可能影响边沿位置的任何区域之外。假设begin(t)和end(t)计数器的值被解释为在有符号区间[-1/2, 1/2)内,或者可以忽略高位以将其置于此范围内。为了确保它不接近符号变化,最简单的方法是当,且仅当计数器位于区间[ 1/8, 3/8)或[-3/8,-1/8)内时测试并重新初始化抖动值,以确保有足够的时间重新初始化随机值。这些区间尤其可以通过检查符号位并断言接下来的两个最高有效位必须异或(xor)到布尔真值来确定。
[0134]
实现此目的的一个简单方法是创建一个包含begin
δ
和end
δ
值的线性反馈移位寄存器(lfsr)。在上述条件为真时,只允许寄存器按一位计时,只要该值的比特数远远短于区间中tick的四分之一,就可以有效地为每个上升沿和下降沿随机选择抖动。
[0135]
转到图5a、5b、5c和5d,显示了用于在输出信号上产生抖动或抖动效应的方法的25%占空比线性相位和占空比实现的关键参数的可视化。
[0136]
图5a显示了θ=θ
′
(t)和θ=t的图100,以显示关键距离参数(δ
′
(t))/2和它的投影如何在最终脉冲信号中产生边沿。x轴104示出了再次归一化的时间(以基频周期计)t,而y轴102示出了归一化的相位角(以转数计)θ。信号105现在显示25%的占空比,以说明计数器机制如何在相位和频率变化时保持占空比百分比。垂直虚线130显示θ=θ
′
(t)和θ=t之间的差小于(δ
′
(t))/2(在图示中为1/8)的距离测试如何映射到占空比为25%的信号上。水平波浪线111是来自(在该实施例中)每个基频tick的线性内插的θ值,θ=θ
′
(t),该函数表示相位的正弦变化,其引起最终输出脉冲宽度(幅度)、相位和频率调制信号的频率的正弦变化。如前所述的对角线110表示线θ=t。顶点125示出了θ=θ
′
(t)和θ=t之间的差为零的位置,对应于输出信号的高区的中心点。垂直箭头127示出了描绘θ=θ
′
(t)和θ=t的线之间的差异程度,其中该差异的幅度为(δ
′
(t))/2,表示输出信号的边沿。
[0137]
图5b显示了计数器“begin(t)”和“end(t)”的图200,以显示当应用逻辑and时,具有环绕的计数器的符号位是如何产生相同的数字信号的(作为交叉点并且在两条短划线232和234之间但同时也在点虚线231和233之间的区域是描述最终信号的高部分的区域)。x轴202示出了再次归一化的时间(以基频周期计)t,但是在该图中,y轴204现在示出了t,其可以被解释为输出信号的周期的分数。虚对角线209示出了函数“begin(t)”,其为θ
′
(t)-t移位(δ
′
(t))/2,以在零(t=0)处产生输出信号的上升沿。点虚线对角线211表示函数“end(t)”,其为θ
′
(t)-t在相反方向上移动(δ
′
(t))/2,以在零(t=0)处产生另一个边沿,相应地,输出信号的下降沿。垂直短划线232对应于短划线对角线209与t=0相交的点,即x轴,其向下投影到输出信号的上升沿上。垂直点虚线233对应于点虚线对角线211与t=0相交的点,即x轴。垂直短划线220对应于短划线对角线与t=( /-)1/2相交的点,它是上升沿的对映点,也是在时间上的一个位置,在这里对“begin(t)”计数器施加概率抖动(不连续)不会
影响输出信号,因此不会产生欠幅(runt)脉冲或其他信号伪影。(如本文所用,“对映”是指与数字信号中感兴趣的点相位相差180度的点)。垂直点虚线222对应于点虚线对角线与t=( /-)1/2相交的点,它是下降沿的对映点和时间位置,其中将概率抖动(不连续性)应用于“end(t)”计数器不会影响输出信号,因此不会产生欠幅脉冲或其他信号伪影。信号207显示输出脉冲宽度(幅度)、相位和频率调制信号。
[0138]
图5c显示了“begin(t)”(短划线)和“end(t)”(点虚线)的图300,其中未加权抖动的夸大程度显示为较淡的短划线(“begin(t)”)和较淡的点虚线(“end(t)”)以及这如何通过在边沿位置引入不确定性来修改显示的输出信号。x轴304示出了再次归一化的时间(以基频周期计)t。y轴302显示t,其可以被解释为输出信号的周期的分数。较暗的虚对角线310示出了函数“begin(t)”,其为θ
′
(t)-t移位δ
′
(t))/2,以在零(t=0)处产生输出信号的上升沿。较浅的短划线对角线320显示函数“begin(t)”,但这次移动了最大抖动量,以在对角线310和320之间定义表示函数“begin(t)”的抖动对角线的可能位置范围。较暗的点虚线对角线340表示函数“end(t)”,其为θ
′
(t)-t在相反方向上移动(δ
′
(t))/2,以在零(t=0)处产生另一个边沿,相应地,输出信号的下降沿。较浅的点虚线对角线330显示函数“end(t)”,但这次移动了最大抖动量,以在对角线340和330之间定义表示函数“end(t)”的抖动对角线的可能位置范围。较暗的垂直短划线370对应于较暗的短划线对角线310与t=0相交的点,即x轴,其向下投影到输出信号的最新可能上升沿。较浅的垂直短划线365对应于较浅的短划线对角线320与t=0相交的点,即x轴,其向下投影到输出信号的最早可能上升沿。较暗的垂直点虚线382对应于较暗的点虚线对角线340与t=0相交的点,即x轴,其向下投影到输出信号的最新可能下降沿。较浅的垂直点虚线381对应于较浅的点虚线对角线330与t=0相交的点,即x轴,其向下投影到输出信号的最早可能下降沿。较暗的垂直点虚线384对应于最近的时间点,而较浅的垂直短划线383对应于短划线对角线与t=( /-)1/2相交的最早时间点,它是上升沿的对映点,并定义了一个时间位置,在该位置对“begin(t)”计数器应用概率抖动(不连续性)不会影响输出信号,因此不会产生欠幅脉冲或其他信号伪影,即使尽管这取决于应用抖动的计数器。较暗的垂直点虚线355对应于最近的时间点,而较浅的垂直点虚线350对应于点虚线对角线与t=( /-)1/2相交的最早时间点,它是下降沿的对映点,并定义了一个时间位置,在该位置对“end(t)”计数器应用概率抖动(不连续性)不会影响输出信号,因此不会产生欠幅脉冲或其他信号伪影,即使这取决于应用抖动的计数器。作为参考,信号362是由最新的可能的(未抖动的)计数器产生的输出信号,表明存在一致的系统概率偏差,是抖动宽度的一半,可以忽略不计。
[0139]
图5d显示了抖动值〖“begin”〗_δ和〖“end”〗_δ的重新初始化时间(阴影框)的图1400,请注意,“begin(t)”的阴影框不能出现在边沿,其位置可能会因〖“begin”〗_δ的不同值而改变,反之亦然。x轴1402示出了再次归一化的时间(以基频周期计)t。y轴1405显示t,其可以被解释为输出信号的周期的分数。短划线对角线1440示出函数“begin(t)”,其是θ
′
(t)-t偏移(δ
′
(t))/2,以在零(t=0)处产生输出信号的上升沿,但在t的其他值(例如水平短划线t= 1/81498和t= 3/81492之间)可用于确定一个适当的窗口,在该窗口中以概率抖动的形式将不连续性应用于计数器“begin(t)”,从而应用于上升沿。点虚线对角线1430示出函数“end(t)”,其是θ
′
(t)-t偏移(δ
′
(t))/2,以在零(t=0)处产生输出信号的下降沿,但在t的其他值(例如水平点虚线t=-3/81493和t=-1/81499之间)可用于确定一个适
当的窗口,在该窗口中以概率抖动的形式将不连续性应用于计数器“end(t)”,从而应用于下降沿。垂直短划线1475和位于同一位置的点划线1480表示由t的投影生成的时间区域的开始和结束,其中安全地不连续地修改函数“begin(t)”的抖动是有效的,如左侧线框1490所示。位于同一位置的点划线1480和垂直点虚线1470表示由t的投影生成的时间区域的开始和结束,其中安全地不连续地修改函数“end(t)”的抖动是有效的,如右侧线框1415所示。
[0140]
转向图6a、6b、6c和6d,显示了该方法的75%占空比线性相位和占空比实现的关键参数的可视化。
[0141]
图6a显示了θ=θ
′
(t)和θ=t的图1500,以显示关键距离参数(δ
′
(t))/2和它的投影如何在最终脉冲信号中产生边沿。x轴1520示出了再次归一化的时间(以基频周期计)t,而y轴1510示出了归一化的相位角(以转数计)θ。信号1540现在显示75%的占空比,以说明计数器机制如何在相位和频率变化时保持占空比百分比。垂直虚线1575显示θ=θ
′
(t)和θ=t之间的差小于(δ
′
(t))/2(在图示中为3/8)的距离测试如何映射到占空比为75%的信号上。水平波浪线1535是来自(在该实施例中)每个基频tick的线性内插的θ值,θ=θ
′
(t),该函数表示相位的正弦变化,其引起最终输出脉冲宽度(幅度)、相位和频率调制的频率的正弦变化。如前所述的对角线1525表示线θ=t。顶点1576示出了θ=θ
′
(t)和θ=t之间的差为零的位置,对应于输出信号的高区的中心点。垂直箭头1550示出了描绘θ=θ
′
(t)和θ=t的线之间的差异程度,其中该差异的幅度为(δ
′
(t))/2,表示输出信号的边沿。
[0142]
图6b显示了计数器“begin(t)”和“end(t)”的图1600,以显示当应用逻辑or时,具有环绕的计数器的符号位是如何产生相同的数字信号的(由短划线251和253之间以及同时点虚线252和254之间的间隔共同形成的联合区域是描述最终信号的高部分的区域)。x轴1610示出了再次归一化的时间(以基频周期计)t,但是在该图中,y轴204现在示出了t,其可以被解释为输出信号的周期的分数。虚对角线1640示出了函数“begin(t)”,其为θ
′
(t)-t移位(δ
′
(t))/2,以在零(t=0)处产生输出信号的上升沿。点虚线对角线1630表示函数“end(t)”,其为θ
′
(t)-t在相反方向上移动(δ
′
(t))/2,以在零(t=0)处产生另一个边沿,相应地,输出信号的下降沿。垂直短划线1660对应于短划线对角线1640与t=0相交的点,即x轴,其向下投影到输出信号的上升沿上。垂直点虚线1650对应于点虚线对角线1630与t=0相交的点,即x轴。垂直短划线1663对应于短划线对角线与t=( /-)1/2相交的点,它是上升沿的对映点,也是在时间上的一个位置,在这里对“begin(t)”计数器施加概率抖动(不连续)不会影响输出信号,因此不会产生欠幅(runt)脉冲或其他信号伪影。垂直点虚线1665对应于点虚线对角线与t=( /-)1/2相交的点,它是下降沿的对映点和时间位置,其中将概率抖动(不连续性)应用于“end(t)”计数器不会影响输出信号,因此不会产生欠幅脉冲或其他信号伪影。信号1670显示输出脉冲宽度(幅度)、相位和频率调制信号。
[0143]
图6c显示了“begin(t)”(短划线)和“end(t)”(点虚线)的图1700,其中未加权抖动的夸大程度显示为较淡的短划线(“begin(t)”)和较淡的点虚线(“end(t)”)以及这如何通过在边沿位置引入不确定性来修改显示的输出信号。x轴1710示出了再次归一化的时间(以基频周期计)t。y轴1720显示t,其可以被解释为输出信号的周期的分数。较暗的虚对角线1728示出了函数“begin(t)”,其为θ
′
(t)-t移位(δ
′
(t))/2,以在零(t=0)处产生输出信号的上升沿。较浅的短划线对角线1729显示函数“begin(t)”,但这次移动了最大抖动量,以在对角线1729和1728之间定义表示函数“begin(t)”的抖动对角线的可能位置范围。较暗的点
虚线对角线1724表示函数“end(t)”,其为θ’(t)-t在相反方向上移动(δ
′
(t))/2,以在零(t=0)处产生另一个边沿,相应地,输出信号的下降沿。较浅的点虚线对角线1722显示函数“end(t)”,但这次移动了最大抖动量,以在对角线1722和1724之间定义表示函数“end(t)”的抖动对角线的可能位置范围。较暗的垂直短划线1776对应于较暗的短划线对角线1728与t=0相交的点,即x轴,其向下投影到输出信号的最新可能上升沿。较浅的垂直短划线1774对应于较浅的短划线对角线1729与t=0相交的点,即x轴,其向下投影到输出信号的最早可能上升沿。较暗的垂直点虚线1732对应于较暗的点虚线对角线1724与t=0相交的点,即x轴,其向下投影到输出信号的最新可能下降沿。较浅的垂直点虚线1734对应于较浅的点虚线对角线1722与t=0相交的点,即x轴,其向下投影到输出信号的最早可能下降沿。较暗的垂直点虚线1738对应于最近的时间点,而较浅的垂直短划线1736对应于短划线对角线1728、1729与t=(-/-)1/2相交的最早时间点,它是上升沿的对映点,并定义了一个时间位置,在该位置对“begin(t)”计数器应用概率抖动(不连续性)不会影响输出信号,因此不会产生欠幅脉冲或其他信号伪影,即使尽管这取决于应用抖动的计数器。较暗的垂直点虚线1756对应于最近的时间点,而较浅的垂直点虚线1754对应于点虚线对角线1722、1724与t=( /-)1/2相交的最早时间点,它是下降沿的对映点,并定义了一个时间位置,在该位置对“end(t)”计数器应用概率抖动(不连续性)不会影响输出信号,因此不会产生欠幅脉冲或其他信号伪影,即使这取决于应用抖动的计数器。作为参考,信号1730是由最新的可能的(未抖动的)计数器产生的输出信号,表明存在一致的系统概率偏差,是抖动宽度的一半,可以忽略不计。
[0144]
图6d显示了抖动值〖“begin”〗_δ和〖“end”〗_δ的重新初始化时间(阴影框)的图800,请注意,“begin(t)”的阴影框不能出现在边沿,其位置可能会因〖“begin”〗_δ的不同值而改变,反之亦然。x轴802示出了再次归一化的时间(以基频周期计)t。y轴804显示t,其可以被解释为输出信号的周期的分数。短划线对角线830示出函数“begin(t)”,其是θ
′
(t)-t偏移(δ
′
(t))/2,以在零(t=0)处产生输出信号的上升沿,但在t的其他值(例如水平短划线t= 1/8898和t= 3/8890之间)可用于确定一个适当的窗口,在该窗口中以概率抖动的形式将不连续性应用于计数器“begin(t)”,从而应用于上升沿。点虚线对角线840示出函数“end(t)”,其是θ
′
(t)-t偏移(δ
′
(t))/2,以在零(t=0)处产生输出信号的下降沿,但在t的其他值(例如水平点虚线t=-3/8892和t=-1/8899之间)可用于确定一个适当的窗口,在该窗口中以概率抖动的形式将不连续性应用于计数器“end(t)”,从而应用于下降沿。位于同一位置的点划线844和垂直短划线846表示由t的投影生成的时间区域的开始和结束,其中安全地不连续地修改函数“begin(t)”的抖动是有效的,如左侧线框820所示。垂直点虚线842和位于同一位置的点划线844表示由t的投影生成的时间区域的开始和结束,其中安全地不连续地修改函数“end(t)”的抖动是有效的,如右侧线框810所示。应当注意,框810和820现在以与图5d相反的顺序出现。
[0145]
iii.结论
[0146]
尽管前述描述公开了特定值,但任何其他特定值可用于实现类似结果。此外,可以选择和组合前述实施例的各种特征以产生改进的触觉系统的多种变体。
[0147]
在前述说明书中,已经描述了具体实施例。然而,本领域的普通技术人员可以领会到在不背离本发明范围的情况下可以做出多种修改和改变,本发明的范围如以下权利要求
中所示。相应地,说明书和附图应被视为说明性的而不是限制性的理解,并且所有这样的改进都应确定为在本教导的范围内。
[0148]
此外,在本文档中,诸如第一和第二、顶部和底部等关系术语可以仅用于将一个实体或动作与另一个实体或动作区分开来,而不必要求或暗示此类实体之间的任何实际此类关系或顺序或动作。术语“包含”、“具有”、“包括”、“含有”或其任何其他变体旨在涵盖非排他性包含,例如包含、具有、包括、含有一系列元素的过程、方法、物品或装置不仅包括那些元素,还可以包括未明确列出或此类过程、方法、物品或装置固有的其他元素。以“包含
……”
、“具有
……”
、“包括
……”
、“含有
……”
开头的元素在没有更多限制的情况下不排除在包含、具有、包括或含有该元素的过程、方法、物品或装置中存在额外的相同元素。除非本文另有明确说明,否则术语“a”和“an”被定义为一个或多个。术语“实质上”、“基本上”、“大概”、“大约”或其任何其他形式,被定义为接近本领域普通技术人员所理解的。此处使用的术语“耦合”定义为连接,但不一定是直接的,也不一定是机械的。以某种方式“配置”的设备或结构至少以这种方式配置,但也可以以未列出的方式配置。
[0149]
提供公开的摘要是为了让读者能够快速确定技术公开的性质。提交该摘要的前提是,它不会被用来解释或限制权利要求的范围或含义。此外,在前述详细描述中,为了简化本公开的目的,在各种实施例中将各种特征组合在一起。这种披露方法不应被解释为反映出一种意图,即所要求的实施例需要比每项权利要求中明确叙述的更多的特征。相反,如以下权利要求所反映的,发明主题在于少于单个公开实施例的所有特征。因此,以下权利要求在此并入详细说明中,每个权利要求作为单独要求保护的主题独立存在。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。