1.本发明属于永磁同步风力发电机三相变流器的控制技术领域,具体涉及一种永磁同步发电机变流器无传感倍频转速和相位的确定方法,该方法特定针对无转速传感器工况下转速和相位的确定。
背景技术:
2.风力发电机是将风能转化为电能的装置,主要由叶片,发电机,机械部件和电气部件组成。风力发电的原理是利用风力带动风车叶片旋转,来促使发电机发电。因为风力发电没有燃料问题,也不会产生辐射或空气污染,因而风力发电正在世界上形成一股热潮。
3.目前国家针对风电变流器的性能指标及发电质量有严格的要求,特别是转速和相位的实时性和准确性对变流器的控制及性能极其重要。在永磁同步风力发电机系统中,当发电机转速较低时,在没有转速传感器的情况下,发电机的转速只能通过反电动势计算,但这将导致计算出的发电机转速有一定的时间延迟,实时性不够。而发电机的相位只能通过相位差计算,但计算结果波动会较大。若要减少波动,则需要进行滤波,但滤波又同样会影响实时性。因此,有必要研发新技术对现有技术中存在的技术问题进行改进。
技术实现要素:
4.本发明的目的在于克服现有技术中存在的上述技术问题,提供了一种永磁同步发电机变流器无传感倍频转速和相位的确定方法,采用该方法能够更快更准确地得到变流器的转速和相位,进而为变流器的精准控制提供支撑。
5.为实现上述目的,本发明采用的技术方案如下:
6.一种永磁同步发电机变流器无传感倍频转速和相位的确定方法,其特征在于:该方法基于无转速传感器条件下实现转速和相位的确定,其包括如下步骤:
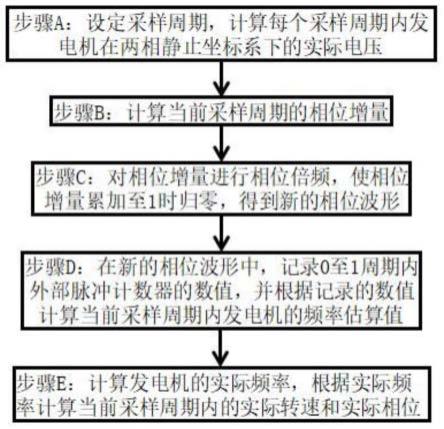
7.步骤a:设定采样周期,先根据采样周期间隔采集发电机的三相电压和三相电流,再通过零漂自适应计算校准后的三相电压和三相电流,然后根据校准后的三相电压和三相电流计算每个采样周期内发电机在两相静止坐标系下的实际电压;
8.步骤b:根据步骤a的结果分别获取每个采样周期内发电机的相位角标幺化估算值,根据发电机的相位角标幺化估算值计算当前采样周期的相位增量;
9.步骤c:对步骤b的结果进行相位倍频,使相位增量累加至1时归零,得到新的相位波形;
10.步骤d:在新的相位波形中,预设虚拟脉冲计数器记录0至1周期内外部脉冲计数器的数值,并根据记录的数值计算当前采样周期内发电机的频率估算值;
11.步骤e:对发电机在两相静止坐标系下的实际电压进行积分,将积分值转换到两相旋转坐标系下并计算d轴相对于d轴和q轴模量和的变化量,然后由pid控制器根据频率估算值和变化量计算发电机的实际频率,并根据实际频率计算当前采样周期内的实际转速和实际相位。
12.步骤a中,实际电压的计算方法为:先将每次采集的三相电压和三相电流进行零漂自适应计算,得出校准后的三相电压和三相电流,再将校准后的三相电压和三相电流转换为两相静止坐标系下的瞬时电压向量和瞬时电流向量,然后根据瞬时电压向量和瞬时电流向量计算发电机在两相静止坐标系下的实际电压。
13.步骤a中,设定采集的三相电压分别为三相电流分别为则经过零漂自适应后得到校准后的三相电压和三相电流分别为:
[0014][0015][0016][0017][0018][0019][0020]
式中,u1(t)、u2(t)和u3(t)分别为校准后的三相电压,i1(t)、i2(t)和i3(t)分别为校准后的三相电流。
[0021]
步骤a中,发电机在两相静止坐标系下的实际电压的计算方法为:
[0022][0023][0024]
其中,校准后的三相电压与两相静止坐标系下瞬时电压向量的转换关系为:
[0025][0026]
校准后的三相电流与两相静止坐标系下瞬时电流向量的转换关系为:
[0027][0028]
式中,u
α
(t)和u
β
(t)分别为发电机在两相静止坐标系下的实际电压,l为发电机绕组感抗,r为发电机阻抗,t为时间;和分别为瞬时电压向量,i
α
(t)和i
β
(t)分别为瞬时电流向量。
[0029]
步骤b中,当前采样周期的相位增量的计算方法为:先对发电机在两相静止坐标系下的实际电压进行反正切得到相位角,再对相位角进行0到1标幺化得到相位角标幺化估算
值,然后根据上一采样周期的相位角标幺化估算值和当前采样周期的相位角标幺化估算值计算当前采样周期的相位增量,其计算公式为:
[0030][0031]
式中,为上一采样周期的相位角标幺化估算值,θ0为当前采样周期的相位角标幺化估算值,dθ为当前采样周期的相位增量。
[0032]
步骤c中,相位倍频是指放大相位增量的倍数。
[0033]
步骤d中,频率估算值的计算方法为:
[0034][0035]
其中,
[0036]
t0=δt
×nsum
[0037]nsum
=n n-1
n-2
... n-m
[0038]
式中,f0为发电机的频率估算值,t0为发电机的转动周期估算值,n为虚拟脉冲计数器记录的数值,n
sum
为虚拟脉冲计数器记录的数值之和,n-m
为虚拟脉冲计数器上一次记录的数值,m为放大倍数,δt为采样周期。
[0039]
步骤e中,发电机的实际频率的计算方法为:以频率估算值为pid控制器的基值,以0位参考,以d轴相对于d轴和q轴模量和的变化量为反馈,通过pid控制器计算得出发电机的实际频率;其中,电压变化量的计算公式为:
[0040]u变
=ud(t)/(|ud(t)| |uq(t)|)
[0041][0042]
式中,u
变
为d轴相对于d轴和q轴模量和的变化量,和为对发电机在两相静止坐标系下的实际电压进行积分后得到的积分值,ud(t)和uq(t)分别为积分值和转换到两相旋转坐标系下的电压。
[0043]
步骤e中,实际转速和实际相位的计算方法为:
[0044][0045]
θ=θ-1
f
×
δt
[0046]
式中,ω为当前采样周期的实际转速,θ为当前采样周期的实际相位,p为极对数,f为实际频率,θ-1
为上一采样周期的实际相位,当θ》1时归零。
[0047]
采用上述技术方案,本发明的有益技术效果是:
[0048]
本发明在确定转速和相位的过程中,采用零漂自适应方法,有效减少了温度对数据采样的影响,实现电压和电流的三相均衡。后续计算均在两相静止(α,β)坐标系下进行,通过将3组电压电流数据转换为2组电流电压数据,再进行数据滤波和相关的计算,减少了三分一的运算量。采用相位倍频,优点是得到固定倍数的高速频率相位变化,将低频运算转化为高频运算,提高了实时性。通过计算发电机两相静止坐标系下电压的积分值,可以实现数据的滤波降噪,并且方便后续的功率计算。再将电压积分值转换两相旋转(d,q)坐标系
下,通过锁相环计算发电机转速和相位。因而相对于现有技术来说能够更快更准确地得到变流器的转速和相位。从而为后续的电流环控制计算提供实时性更好的发电机相位角,以及为变流器的精准控制提供了有力支撑。
附图说明
[0049]
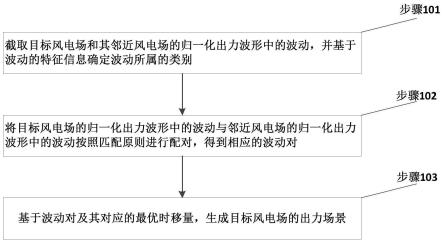
图1为本发明的流程图。
[0050]
图2为三相转两相静止坐标系的示意图。
[0051]
图3为两相静止坐标系转两相旋转坐标系的示意图。
具体实施方式
[0052]
实施例1
[0053]
本实施例公开了一种永磁同步发电机变流器无传感倍频转速和相位的确定方法,该方法基于无转速传感器条件下实现转速和相位的确定,如图1所示,其包括如下步骤:
[0054]
步骤a:设定采样周期,该采样周期一般不超过0.5ms,具体根据实际需求确定。设定好采样周期后,先根据采样周期间隔采集发电机的三相电压和三相电流,再通过零漂自适应计算校准后的三相电压和三相电流,然后根据校准后的三相电压和三相电流计算每个采样周期内发电机在两相静止坐标系下的实际电压。
[0055]
其中,所述实际电压的计算方法为:先将每次采集的三相电压和三相电流进行零漂自适应计算,得出校准后的三相电压和三相电流,再将校准后的三相电压和三相电流转换为两相静止坐标系下的瞬时电压向量和瞬时电流向量,然后根据瞬时电压向量和瞬时电流向量计算发电机在两相静止坐标系下的实际电压。
[0056]
进一步的,本步骤的具体实现方法为:设定采集的三相电压分别为进一步的,本步骤的具体实现方法为:设定采集的三相电压分别为三相电流分别为则经过零漂自适应后得到校准后的三相电压和三相电流分别为:
[0057][0058][0059][0060][0061][0062][0063]
式中,u1(t)、u2(t)和u3(t)分别为校准后的三相电压,i1(t)、i2(t)和i3(t)分别为校准后的三相电流。
[0064]
更进一步的,发电机在两相静止坐标系下的实际电压的计算方法为:
[0065][0066][0067]
其中,如图2所示,
[0068]
校准后的三相电压与两相静止坐标系下瞬时电压向量的转换关系为:
[0069][0070]
校准后的三相电流与两相静止坐标系下瞬时电流向量的转换关系为:
[0071][0072]
式中,u
α
(t)和u
β
(t)分别为发电机在两相静止坐标系下的实际电压,l为发电机绕组感抗,r为发电机阻抗,t为时间;和分别为瞬时电压向量,i
α
(t)和i
β
(t)分别为瞬时电流向量。
[0073]
步骤b:根据步骤a的结果分别获取每个采样周期内发电机的相位角标幺化估算值,根据发电机的相位角标幺化估算值计算当前采样周期的相位增量。
[0074]
其中,所述的当前采样周期的相位增量的计算方法为:先对发电机在两相静止坐标系下的实际电压进行反正切得到相位角,再对相位角进行0到1标幺化得到相位角标幺化估算值,然后根据上一采样周期的相位角标幺化估算值和当前采样周期的相位角标幺化估算值计算当前采样周期的相位增量,其计算公式为:
[0075][0076]
式中,为上一采样周期的相位角标幺化估算值,θ0为当前采样周期的相位角标幺化估算值,dθ为当前采样周期的相位增量。
[0077]
步骤c:对步骤b的结果进行相位倍频,使相位增量累加至1时归零,得到新的相位波形。所述相位倍频是指放大相位增量的倍数,该放大位数通常可根据实际需求确定,例如32倍、64倍、128倍等。
[0078]
步骤d:在新的相位波形中,预设虚拟脉冲计数器记录0至1周期内外部脉冲计数器的数值,并根据记录的数值计算当前采样周期内发电机的频率估算值。
[0079]
所述频率估算值的计算方法为:
[0080][0081]
其中,
[0082]
t0=δt
×nsum
[0083]nsum
=n n-1
n-2
... n-m
[0084]
式中,f0为发电机的频率估算值,t0为发电机的转动周期估算值,n为虚拟脉冲计数器记录的数值,n
sum
为虚拟脉冲计数器记录的数值之和,n-m
为虚拟脉冲计数器上一次记录的数值,m为放大倍数,δt为采样周期。
[0085]
步骤e:对发电机在两相静止坐标系下的实际电压进行积分,将积分值转换到两相旋转坐标系下并计算d轴相对于d轴和q轴模量和的变化量,然后由pid控制器根据频率估算值和变化量计算发电机的实际频率,并根据实际频率计算当前采样周期内的实际转速和实际相位。再重复上述步骤,即可得出其它采样周期内的实际转速和实际相位。
[0086]
其中,所述发电机的实际频率的计算方法为:以频率估算值为pid控制器的基值,以0位参考,以d轴电压相对变化量为反馈,通过pid控制器计算得出发电机的实际频率;其中,电压变化量的计算公式为:
[0087]u变
=ud(t)/(|ud(t)| |uq(t)|)
[0088][0089]
式中,u
变
为d轴相对于d轴和q轴模量和的变化量,和为对发电机在两相静止坐标系下的实际电压进行积分后得到的积分值,ud(t)和uq(t)分别为积分值和转换到两相旋转坐标系下的电压,转换关系如图3所示。
[0090]
进一步的,所述实际转速和实际相位的计算方法为:
[0091][0092]
θ=θ-1
f
×
δt
[0093]
式中,ω为当前采样周期的实际转速,θ为当前采样周期的实际相位,p为极对数,f为实际频率,θ-1
为上一采样周期的实际相位,当θ》1时归零。
[0094]
实施例2
[0095]
本实施例对实施例1所述方法进行了验证,如下:
[0096]
设定发电机的额定转速为8.4赫兹,采样周期为0.5ms,相位倍频为32倍,则验证方法如下:
[0097]
步骤1:三相电压采样经过零漂自适应校准后的三相电压u1(t)、u2(t)和u3(t)是随时间变化的正弦波和开关波的混合波形数据。三相电流采样经过零漂自适应校准后的电流i1(t)、i2(t)和i3(t)是随时间变化的类正弦波数据。校准后的三相电压和三相电流分别经过三相转两相静止(α,β)坐标系,得到的瞬时电压向量和是随时间变化的正弦波和开关波的混合波形数据,得到的瞬时电流向量i
α
(t)和i
β
(t)是随时间变化的类正弦波数据。
[0098]
根据反电动势计算发电机实际电压的三相转两相静止(α,β)坐标系计算值u
α
(t)和u
β
(t),其中发电机感抗和阻抗均为常数,u
α
(t)和u
β
(t)是随时间变化的类正弦波数据。
[0099]
[0100][0101]
步骤2:计算此刻发电机相位角是随时间变化幅值范围0~1的类三角波数据。
[0102]
计算相位角增量dθ=θ0(0)-θ0(-1),其中,θ0(0)为本采样周期的发电机相位角,θ0(-1)为上一采样周期的发电机相位角。
[0103]
相位增量倍频32
×
dθ,累加32
×
dθ,当超过1时归零,得到32倍频的相位角θ
32
(t)是随时间变化幅值范围0~1的类三角波数据,频率约为发电机频率的32倍。
[0104]
通过外部计时脉冲变量计算θ
32
(t)一个三角波的周期t
32
,放大32倍,得到发电机的转动周期估算值t0,频率估算值
[0105]
计算两相静止坐标系下实际电压u
α
(t)和u
β
(t)的积分值和
[0106][0107]
为上一采样周期的积分值,u
α
(0)为本采样周期u
α
(t)的值。
[0108]
计算同理。
[0109]
通过两相静止坐标系转两相旋转坐标系,计算出ud(t)和uq(t)。
[0110]
锁相环pid的前馈为频率估算值f0,参考值为0,反馈值为两相旋转坐标系(d,q)下ud(t)和uq(t)中ud(t)的变量,得到发电机的实际频率f。
[0111]
对比方式:若不经过倍频,通过计算θ0(t)一个三角波的周期t0',得到发电机频率估算值f0',再同样经过锁相环pid,得到发电机的实际频率f'。
[0112]
通过上述对比测试可当,当发电机转速阶跃变化时,f'比f延迟当前发电机真实周期的一半以上,这也证明了本发明采用上述特定步骤后能够更快更准确地得到变流器的转速和相位。
[0113]
以上所述,仅为本发明的具体实施方式,本说明书中所公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的替代特征加以替换;所公开的所有特征、或所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以任何方式组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。