1.本发明涉及用于稳定船只和船舶的技术。更具体地,本发明涉及一种具有可以用于抵制横摇运动的磁性轴承的陀螺仪稳定器。
背景技术:
2.现有技术的船用陀螺仪稳定器根据已建立的稳定船只或船舶的横摇运动的原理、并通过利用来自具有万向节结构的自旋飞轮或转子的陀螺仪稳定器的抵制扭矩来工作。
3.当陀螺仪稳定器布置在船或船只中时,其定位为与飞轮自旋轴线、万向节轴线和船横摇轴线正交,其中,船横摇轴线在船的纵向方向上。自旋的飞轮的角动量是守恒的物理量,当船只摇动时,飞轮将进动(precess),以保持角动量。进动将产生抵制船体上的横摇扭矩的稳定扭矩,从而使陀螺仪稳定器趋于扶正船只。
4.在进动期间,即,当陀螺仪正在进动以抵制横摇时,飞轮角度将相对于船体变化,导致偏航和/或俯仰方向上的扭矩分量。然而,船通常可以抵抗俯仰和偏航旋转,但是随着飞轮角度的增大,横摇稳定效率会降低。
5.这样的陀螺仪横摇稳定器的示例在us20050076726a1和us2005274210a1中提出。稳定器包括飞轮或转子、被构造为使飞轮围绕自旋轴线自旋的飞轮驱动电机、被构造为允许飞轮围绕万向节轴线进动的万向节结构、以及用于向飞轮施加围绕万向节轴线的扭矩的装置。飞轮和万向节结构被构造为使得当安装在船只上时,稳定器抑制船只的横摇运动。连接到旋转轮轴的电动机将转子加速到所需的旋转速度。飞轮可以安装在真空室中,以减少空气阻力。第一个参考指示转子可以以10000rpm或更高的速度旋转。
6.然而,如wo2007095403a2中所获知的,以高旋转速度运行的重型飞轮由承受高轴向和径向载荷的轴承支撑。结果是,这些轴承会产生大量的摩擦生热,必须将其消散,以避免危险的热积聚。
7.cn102381452a示出了一种用于船只的陀螺仪稳定器,其中,当将转子旋转到高速时使用机械齿轮,以减小稳定器的尺寸。
8.结果是,高旋转速度与轴承的高磨损和缩短的寿命有关。因此,其很难进一步提高旋转速度,并且必须使陀螺仪变大,以保持低旋转速度,同时实现足够大的陀螺仪进动。
9.us3888553公开了一种悬浮磁性装置,其中,转子被磁性支撑。然而,这种类型的解决方案不能很好地适应于处理由于船中的横摇运动而产生的大扭矩,并且不能很好地提供相反指向的扭矩来使船只稳定。
技术实现要素:
10.本发明的目的是克服现有技术的问题,并且公开一种改进的陀螺仪稳定器和一种陀螺仪稳定器系统。
11.为了利用更紧凑的陀螺仪稳定器来实现所需的稳定效果,飞轮应该优选地使其大部分质量沿着其圆周或轮缘定位。如果可以提高旋转速度,则可以减小飞轮的重量和尺寸,
但是在现有技术中,例如由于轴承的负荷和磨损,导致这很困难。
12.解决上述问题的本发明是根据独立权利要求的陀螺仪稳定器。
13.根据本发明的实施方式的陀螺仪稳定器可以获得以下技术效果;
14.由于转子的旋转速度可以增大而不增大磨损和减少滚珠轴承的寿命,因此陀螺仪稳定器可以制造得比现有技术的稳定器更紧凑。
15.由于陀螺仪稳定器可以以更高的旋转速度旋转,因此可以减小转子直径,并且使转子开始自旋所需的扭矩更小。
16.陀螺仪稳定器可以具有比现有技术的陀螺仪稳定器更高的可靠性和能量效率。
17.因此,可以降低操作成本。
18.陀螺仪稳定器不含油,因此比具有油底壳的陀螺仪稳定器更清洁且更环保。
19.陀螺仪稳定器可以承受在稳定器系统中常见的高瞬态负载。
20.由于其设计,其可以容易地密封,以在真空或充气空间中操作。
附图说明
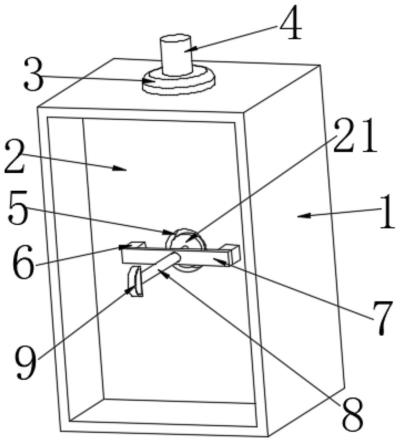
21.图1以透视图示出了根据本发明的陀螺仪稳定器1的一个实施方式。
22.图2以截面图示出了与图1中的陀螺仪稳定器1相同的实施方式,其中,切割平面对应于通过自旋轴线s和万向节轴线g构成的平面。
23.图3a以截面图更详细地示出了图2中的定子组件21和转子组件31。
24.图3b示意性地示出了由定子组件21和转子组件31的构造产生的磁场线。
25.图4a和图4b示出了船只的船体h的截面图,其中,图1中的陀螺仪稳定器布置为具有搁置在船体的中央的支架b或纵梁上的框架6。
26.图5a以截面图示出了陀螺仪稳定器的一个实施方式。
27.图5b以截面图更详细地示出了图5a中的定子组件21和转子组件31。
具体实施方式
28.在以下描述中,阐述了本发明的各种示例和实施方式,以便为技术人员提供对本发明的更透彻的理解。在各种实施方式的上下文中并且参考附图描述的具体细节不意在被解释为限制。相比之下,本发明的范围在所附权利要求中限定。
29.下面描述的实施方式被编号。此外,描述了关于编号的实施方式限定的从属实施方式或相关实施方式。除非另有说明,否则可以与一个或多个编号的实施方式结合的任何实施方式也可以直接与所提及的编号的实施方式的任何从属实施方式结合。
30.在第一实施方式中,本发明是包括布置为围绕自旋轴线s旋转的转子3以及定子2的陀螺仪稳定器1,其中,转子3和定子2分别包括转子组件31和定子组件21。转子组件31相对于如例如图2中所示的自旋轴线s径向地布置在定子组件21的外部。在图2中,转子组件31和/或定子组件21包括例如磁体的磁场产生元件31a、21a,其中,转子组件31和/或定子组件21分别包括转子磁体31a和/或定子磁体21a。
31.在第一从属实施方式中,转子磁体31a和/或定子磁体21a具有在自旋轴线的方向上的磁性轴线。
32.磁性轴线是使磁体的两个磁极接合的线。
33.在可以与第一从属实施方式结合的第二从属实施方式中,转子组件磁体31a和/或定子组件磁体21a在自旋轴线s的方向上以交替的磁场方向堆叠。
34.在可以与第一或第二从属实施方式结合的第三从属实施方式中,转子组件31和/或定子组件21分别包括布置在转子磁体31a和/或定子磁体21a之间的转子中间元件31b和/或定子中间元件21b。
35.在可以与上述任何从属实施方式结合的第四从属实施方式中,其中,转子组件31和定子组件21二者包括磁体,其中,定子组件21中的磁体与转子组件31中的磁体竖直对齐,并且与该转子组件中的具有相反磁场方向的磁体相互面对。
36.在可以与第三和第四从属实施方式结合的第五从属实施方式中,转子组件31和定子组件21二者包括中间元件31b、21b,转子中间元件31b与对应的定子中间元件21b竖直对齐并相互面对。
37.在可以与第三至第五从属实施方式中的任一个结合的第六从属实施方式中,转子中间元件31b布置为比转子磁体31a更靠近定子组件21。
38.在可以与第三至第六从属实施方式中的任一个结合的第七从属实施方式中,定子中间元件21b布置为比定子磁体11a更靠近转子组件31。
39.在可以与第三至第七从属实施方式中的任一个结合的第八从属实施方式中,转子中间元件31b和/或定子中间元件21b中的任一个由铁磁材料制成。
40.定子和/或转子组件31可以是环形的。
41.在可以与第一实施方式结合的第二实施方式中,定子组件21和转子组件31彼此面对并且被构造为提供分层的径向磁场线,该分层的径向磁场线在垂直于径向方向的方向上具有交替的方向。
42.在第一相关实施方式中,转子组件31包括在垂直于径向方向的方向上被转子中间元件31b隔开的转子磁场产生元件31a的分层结构。
43.在可以与第一相关实施方式结合的第二相关实施方式中,随后的转子磁场产生元件31a具有垂直于径向方向的交替的磁场方向。
44.在可以与第一或第二相关实施方式结合的第三相关实施方式中,定子组件21包括在垂直于径向方向的方向上通过定子中间元件21b隔开的定子磁场产生元件21a的分层结构,其中,随后的定子磁场产生元件21a具有垂直于径向方向的交替的磁场方向,并且与定子磁场产生元件21a和转子磁场产生元件31a相互面对,定子磁场产生元件和转子磁场产生元件二者具有垂直于径向方向但方向相反的磁场。
45.转子磁场产生元件31a可以是永磁体。
46.转子中间元件31b可以由钢制成。
47.已经进行了模拟,表明磁性支撑的技术效果可以通过仅在转子组件中、仅在定子组件中或在两个组件中的磁体来实现。当两个组件中都有磁体时,效果要大得多。
48.在第三实施方式中,陀螺仪稳定器1包括转子轮轴36、136和转子框架34、134,其中,转子框架34、134将转子组件31与转子轮轴36、136互相连接并且将转子组件旋转地固定到转子轮轴。
49.在第一从属实施方式中,转子轮轴36、136通过旋转轴承35、135支撑,旋转轴承固定在定子元件2的中央中,将转子轮轴36、136和定子元件2互相连接,并且允许转子元件3围
绕自旋轴线s自旋。如图2和图5a中所示,旋转轴承35、135可以分为上部部分和下部部分,以稳定转子轮轴36、136的每个端。
50.在第二从属实施方式中,转子框架134在关于转子轮轴36、136对称的截面中。
51.在可以与上述第一或第二实施方式结合的第三从属实施方式中,转子框架134在关于垂直于转子轮轴36、136的平面对称的截面中。
52.在可以与上述任何实施方式结合的第四实施方式中,转子框架34包括布置在转子组件31外部的管状环341以及径向元件342,其中,径向元件342连接到管状环341和旋转轴承35。
53.在可以与第三相关实施方式结合的第一相关实施方式中,径向元件342与万向节轴线g成直线地连接到管状环341。
54.在可以与第一相关实施方式结合的第二相关实施方式中,定子组件21和转子组件31被分成对称地布置在万向节轴线g的相对侧上的上部部分和下部部分。
55.转子框架34在可以与第一或第二相关实施方式结合的第三相关实施方式中,至少部分地由非磁性材料或者诸如以黄铜为例的具有低相对磁导率的材料制成。
56.径向元件342可以是盘形的。
57.在可以与上述第一至第三相关实施方式中的任一个结合的第四相关实施方式中,转子3包括径向布置在转子组件31外部的管状支撑元件32,其中,管状支撑元件32被构造为在径向方向上支撑转子组件31。
58.管状支撑元件32可以由诸如以碳纤维为例的复合材料制成。
59.在可以与第三或第四实施方式及其相关实施方式中的任一个结合的第五实施方式中,陀螺仪稳定器1包括在转子轮轴36和转子框架34之间的柔性联接元件343,该柔性联接元件被构造为允许转子磁性组件31相对于转子轮轴36和定子组件21枢转。
60.在第一相关实施方式中,柔性联接元件343被构造为允许转子磁性组件31相对于转子轮轴36和定子组件21以至少0.2度的角度枢转。
61.在可以与第一相关实施方式结合的第二相关实施方式中,柔性联接元件343是柔性爪联接器,其中,一端连接到转子轮轴36并且另一端连接到转子框架34。
62.在可以与上述第一或第二实施方式中的任一个结合的第六实施方式中,陀螺仪稳定器1包括一体式转子框架134,其中,转子框架134包括转子轮轴部分136、径向支撑部分132以及将转子轮轴部分136和径向支撑部分132互相连接的盘部分142。
63.在第一相关实施方式中,转子轮轴部分136通过旋转轴承135支撑,该旋转轴承固定在定子元件2的中央中,将转子轮轴136和定子元件2互相连接,并且允许转子元件3围绕自旋轴线s自旋。如图5a中所示,旋转轴承135可以分为上部部分和下部部分,以稳定转子轮轴136的每个端。轴承136在径向方向上支撑转子轮轴和转子部分。
64.在可以与第一相关实施方式结合的第二相关实施方式中,一体式转子框架134由诸如以钢为例的高强度材料制成。模制或锻造是可以使用的制造技术的示例。
65.在定子元件2内部存在定子组件21和转子组件31,其中,转子组件31布置在定子组件21径向外部。
66.在第三从属实施方式中,径向支撑部分132从盘部分142的周边在垂直于盘部分的方向上延伸,以形成圆筒。
67.在根据第三从属实施方式的第四从属实施方式中,转子组件31布置为固定到圆筒的内壁。
68.在第五从属实施方式中,转子3包括布置在转子组件31与圆筒之间的间隔环137。间隔环可以由非磁性材料或者例如不锈钢304的具有低相对磁导率的材料制成,以减少转子3的径向支撑部分132中的磁通量。
69.在可以与第一至第五实施方式中的任一个结合的第六实施方式中,陀螺仪稳定器包括被构造为固定到船只的框架6,其中,定子元件2被构造为相对于框架6围绕万向节轴线g枢转,其中,万向节轴线g垂直于自旋轴线s。
70.在第一相关实施方式中,陀螺仪稳定器包括将定子元件2和框架6枢转地互相连接的第一万向节枢转轴60a和第二万向节枢转轴60b,其中,第一万向节枢转轴60a和第二万向节枢转轴60b在垂直于自旋轴线s的平面中布置在转子元件3和定子元件2外部。
71.在可以与第一相关实施方式结合的第二相关实施方式中,框架6包括被构造为支撑从定子元件2的外半径径向向外延伸的万向节轴62a、62b的万向节轴承61a、61b,其中,万向节轴62a、62b固定到定子元件2。
72.在可以与上述实施方式中的任一个结合的第七实施方式中,陀螺仪稳定器1包括自旋电机5、105,该自旋电机被构造为使转子元件3相对于定子元件2旋转。自旋电机5、105包括可旋转地固定到定子元件2的电机定子构件50、150以及可旋转地固定到转子元件3的电机转子构件51、151。自旋电机5、105可以包括包围自旋电机5、105并且被构造为将热量从自旋电机5、105传递到周围环境的电机壳体52、152。
73.转子构件51、151可以将热量消散到转子3。
74.在第一从属实施方式中,陀螺仪稳定器1包括将框架6和定子元件2互相连接的制动器7。
75.制动器7可以是包括致动器的主动制动器7。
76.在一个实施方式中,陀螺仪稳定器可以包括将定子磁性组件21和转子磁性组件31包围在填充或抽空气体的空间中的壳体4。自转电机5、105也可以布置在同一壳体内。
77.现在将参照附图说明独立实施方式。
78.图1以透视图示出了根据本发明的陀螺仪稳定器1的实施方式。定子元件2通过框架6支撑,并且不可见的转子元件被构造为在定子元件2内部围绕自旋轴线s旋转,并且定子元件2可以围绕万向节轴线g枢转,以在框架的在由万向节轴线和自旋轴线g、s构成的平面中的运动的相反方向上建立稳定扭矩。此外,图1示出了将定子元件2的一侧与框架6互相连接的万向节枢转轴60a。万向节枢转轴60a包括布置在框架6中的万向节轴承61a以及从定子元件2的外径径向向外延伸的万向节轴62a,其中,万向节轴62a固定到定子元件2并且通过万向节轴承61a支撑。围绕万向节枢转轴60a的上部部分并且可拆卸地固定到框架6的夹具为了说明目的而被有意省略。陀螺仪稳定器1在定子元件2的相对侧上具有相应的万向节枢转轴,其在图中是不可见的。陀螺仪稳定器1还包括在定子元件2和框架6之间的制动器7。
79.图2以截面图示出了与图1中相同的陀螺仪稳定器1,其中,切割平面对应于由自旋轴线s和万向节轴线g构成的平面。如可以看出的,定子元件2为转子元件3提供壳体。在定子元件2的中央中存在旋转轴承35,将转子轮轴36和定子元件2互相连接,并且允许转子元件3围绕自旋轴线s自旋。在该实施方式中,旋转轴承35分为上部部分和下部部分,以稳定转子
轮轴36的每个端。
80.在定子元件2内部存在定子组件21和转子组件31,其中,转子组件31布置在定子组件21径向外部。关于组件的更多细节可以在图3中看到。
81.转子元件3包括转子框架34,该转子框架包括管状支撑元件32,该管状支撑元件布置在转子组件31径向外部,该转子组件被构造为在径向方向上支撑转子组件31。在该实施方式中,支撑元件32由碳纤维材料制成。
82.转子框架34还包括径向布置在转子组件31和管状支撑元件32之间的管状环341,以及实施为将管状环341和转子轮轴36互相连接的盘的径向元件342。在转子轮轴36和盘342之间设置有弹性联接元件343,从而允许转子磁性组件31相对于转子轮轴36和定子组件21轻微枢转。这里,弹性联接元件343是弹性爪式联接器,其中,一端连接到转子轮轴36,另一端连接到盘342。
83.管状环341由黄铜制成,径向元件342由铝制成。
84.陀螺仪稳定器包括被构造为固定到船只的框架6,其中,定子元件2被构造为相对于框架6围绕万向节轴线g枢转,其中,万向节轴线g垂直于自旋轴线g。
85.此外,陀螺仪稳定器包括将定子元件2和框架6枢转地互相连接的第一万向节枢转轴60a和第二万向节枢转轴60b。第一万向节枢转轴60a和第二万向节枢转轴60b在垂直于自旋轴线s的平面中布置在转子元件3和定子元件2外部。
86.框架6包括万向节轴承61a、61b,该万向节轴承被构造为支撑从定子元件2的外径径向向外延伸的万向节轴62a、62b,其中,万向节轴62a、62b固定到定子元件2。
87.旋转电机5位于径向元件342下方并且被构造为使转子元件3围绕自旋轴线s自旋。旋转电机5包括固定到转子轮轴36的电机转子元件51和固定到定子元件2的电机定子元件50。电机壳体52包围旋转电机5并且将热量从电机传递到周围环境。
88.应注意的是,来自旋转转子组件31的离心力主要通过支撑元件32而不是径向元件342吸收。径向元件342的目的主要是将旋转能量从旋转电机50传递到转子组件31以及转子3的径向定位。
89.图3a以截面图更详细地示出了图2中的定子组件21和转子组件31。定子组件21包括定子磁场产生元件21a和定子中间元件21b的分层结构,其中,定子磁场产生元件21a为永磁体,定子中间元件21b由钢制成。
90.转子组件31相应地包括以相同材料制成的转子磁场产生元件31a和转子中间元件31b的分层结构。
91.如从图中可以看出的,定子中间元件21b与转子中间元件31b成直线,并且定子磁场产生元件21a与转子磁场产生元件31a成直线。
92.在附图中,定子磁场产生元件21a和转子磁场产生元件31a的磁场方向已被示出为从南磁极到北磁极的箭头。更具体地,随后的定子磁场产生元件21a具有垂直于径向方向的交替方向。对于转子磁场产生元件31a也是如此。此外,处于同一水平高度的定子磁场产生元件21a和转子磁场产生元件21a、即相互面对的磁性元件,具有相反的磁场。
93.图3b示意性地示出了由定子组件21和转子组件31的构造产生的磁场线。如所见的,在中间元件21b、31b上方和下方的定子磁场产生元件21a和转子磁场产生元件31a都在径向方向上对中间元件21b、31b中的磁场有贡献。
94.如可以看出的,在径向方向上的磁场线的方向对于中间元件21b、31b的随后的层级交替。在该部分中,以及在围绕定子组件21和转子组件31之间的相互面对的周边的其他部分中,建立类似的磁场,并且转子元件3稳定地保持平衡在中央位置。
95.在图5a和图5b中,以截面图示出了本发明的替代实施方式。该实施方式可以在外部类似于图1、图4a和图4b中所示的实施方式。然而,在内部,转子框架和对转子框架的支撑与图2和图3a中所示的不同。
96.如可以看出的,定子元件2为转子元件3提供壳体。在定子元件2的中央中存在旋转轴承135,从而允许转子元件3围绕自旋轴线s自旋。在该实施方式中,旋转轴承135分为上部部分和下部部分。
97.在定子元件2内部存在定子组件21和转子组件31,其中,转子组件31布置在定子组件21径向外部。关于组件的进一步细节可以在图5b和图3b中看到。
98.转子元件3包括一体式转子框架134。一体式转子框架包括通过旋转轴承135支撑的转子轮轴部分136、径向支撑部分132、和将转子轮轴部分136与径向支撑部分132互相连接的柔性盘部分142。径向支撑部分32从盘的外周在垂直于盘的方向上延伸,以形成圆筒,其中,转子组件布置为固定到圆筒的内壁。圆筒关于盘部分对称。
99.仅在转子组件31相对于定子组件21发生位移的情况下才会发生进动。根据该实施方式,一体式转子框架是柔性的,从而允许径向支撑部分132相对于转子轮轴部分136垂直移动。
100.因此,盘部分142的刚度足够大,以保持转子组件132与定子组件121在没有外部扭矩作用于定子组件上时转子处于静止或全速自旋时正确对齐,但是足够低,以允许转子组件在转子自旋且外部扭矩作用在定子组件上时相对于定子组件稍微枢转,该外部扭矩诸如船只中的横摇运动的外部扭。
101.转子组件相对于定子组件的最大相对位移可以被限制,例如通过可用的物理空间或磁场线的分层来限制。
102.在该实施方式中,一体式转子框架由锻钢制造。
103.在该实施方式中,自旋电机105布置为其电机轮轴经由柔性联轴器136连接到转子轮轴136。自旋电机105位于一体式转子框架134下方并且被构造为使转子元件3围绕自旋轴线s自旋。自旋电机105包括固定到转子轮轴136的电机转子元件151和固定到定子元件2的电机定子元件150。电机壳体152包围自旋电机5并且将热量从电机传递到周围环境。
104.本实施方式中的自旋电机可以由其他自旋电机代替,例如,其中电机轮轴与转子轮轴136集成,并且以与图2相同的方式布置在壳体内部。
105.图5a没有具体示出陀螺仪稳定器如何安装在框架中,但是陀螺仪稳定器包括被构造为固定到船只的框架,其中,定子元件2被构造为相对于框架围绕万向节轴线g枢转,其中,万向节轴线g垂直于自旋轴线g。框架和相关部件可以类似于图2中所示的框架6。在这种情况下,自旋电机105可以布置在一体式转子框架134上方或如图2所示集成。
106.在示例性实施方式中,各种特征和细节被组合地示出。针对特定示例描述若干特征不应被解释为暗示这些特征必然必须一起包含在本发明的所有实施方式中。反过来说,参考不同实施方式描述的特征不应被解释为相互排斥。如本领域技术人员将容易理解的,结合本文中描述的特征的任何子集并且不明确相互依赖的实施方式已被发明人设想并且
是意在为公开的一部分。然而,对所有这些实施方式的明确描述不会有助于理解本发明的原理,因此为了简单或简洁起见,省略了一些特征的排列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。