1.本发明涉及一种标签剥离装置、以及标签剥离方法。
背景技术:
2.例如在生化分析等各种血液检查等处理中,作为前处理而获取被检物容器的图像,基于该图像而对检查前的被检物的状态进行检测。被检物容器例如由玻璃等透明的材料构成,在多数被检物容器的外周面粘贴有显示了识别信息等被检物的信息的标签。因此,考虑在对被检物容器进行拍摄之前将标签去除。(日本特开2008-76185号公报)
3.作为将标签剥离的方法,例如使超声波切刀等切刀朝向被检物容器的侧面,在标签形成切口。在这种标签剥离处理中,要求不使被检物容器损伤而仅将标签剥除,但存有位置、动作的调整复杂的问题。
技术实现要素:
4.因此,本发明的目的在于提供能够防止被检物容器的损伤的标签剥离装置以及被检物处理装置。
5.一个方式所涉及的标签剥离装置具有:容器保持部,其对被检物容器进行保持;以及切刀保持件,其将切刀保持为能够拆装,使所述切刀的刀刃部与保持于所述容器保持部且在侧面粘贴有标签的所述被检物容器的侧面接触,使所述刀刃部相对于所述被检物容器沿轴向移动,由此将附着于所述被检物容器的侧面的标签剥除。
6.发明的效果
7.根据本发明所涉及的标签剥离装置,能够防止被检物容器的损伤。
附图说明
8.图1是第1实施方式所涉及的标签剥离装置的主视图。
9.图2是该实施方式所涉及的标签剥离装置的侧视图。
10.图3是表示作为被检物处理装置的检查对象的被检物容器的外观的说明图。
11.图4是表示该实施方式所涉及的标签剥离装置的切刀供给部的结构的斜视图。
12.图5是表示该标签剥离装置的切刀供给部的结构的斜视图。
13.图6是表示该标签剥离装置的剥离部的结构的斜视图。
14.图7是表示该标签剥离装置的剥离部的结构的斜视图。
15.图8是表示该标签剥离装置的剥离部的一部分结构的侧视图。
16.图9是表示该标签剥离装置的剥离部以及切刀回收部的结构的斜视图。
17.图10是表示其他实施方式所涉及的被检物处理单元的结构的俯视图。
具体实施方式
18.[第1实施方式]
[0019]
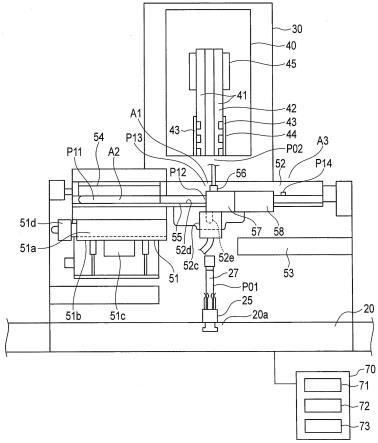
下面,参照附图对本发明所涉及的作为被检物处理装置的标签剥离装置以及作为被检物处理方法的标签剥离方法的实施方式进行说明。图1以及图2是表示本发明的第1实施方式所涉及的被检物处理装置的结构的主视图以及侧视图。图3是表示被检物容器的外观的说明图。图4至图9是表示被检物处理装置以及被检物处理方法的说明图,图4以及图5表示切刀供给部的结构,图6至图8表示剥离部的结构,图9表示切刀回收部的结构。此外,图中的箭头x、y、z分别表示相正交的3个方向,x轴与作为输送路径的输送方向的第1方向对应,y轴与输送路径的宽度方向对应,z轴与上下方向对应。
[0020]
如图1以及图2所示,被检物处理装置10是在被检物的分析处理之前检查被检物的状态的前处理装置。被检物处理装置10具有输送装置20、标签剥离装置30以及控制装置70。
[0021]
输送装置20沿规定的输送路径20a对被检物容器25进行输送,例如由铺设于剥离位置下方的输送机式的保持件输送机构构成。具体而言,输送装置20具有一对导轨21、输送带22以及带进给机构。一对导轨21沿着在图中的x轴方向上延伸的输送路径20a而以恒定宽度设置。
[0022]
输送带22在导轨21之间配置于整个输送路径20a。带进给机构例如是与电机等驱动源连接的输送辊,在输送带22的里侧进行旋转驱动而使输送带22进行进给。
[0023]
输送装置20通过输送带22的进给运动而沿输送路径20a对保持被检物容器25的保持件24进行输送。而且,利用沿输送路径20a设置的标签剥离装置30等各处理装置,对被检物容器25或被检物25a进行各种处理。
[0024]
保持被检物容器25的保持件24以立起状态支撑于一对导轨21之间,随着输送带22的移动而被输送。被检物容器25例如是如图3所示上端开口且下端封闭的透明的圆筒体的试管,在内部对血清等被检物进行收容。被检物容器25例如由玻璃、树脂构成。利用粘接剂或者粘着剂将标签27粘贴于被检物容器25的外周侧面。在标签27,作为被检物25a的识别信息等各种显示信息而对条形码、字符进行显示。显示信息例如为表示被检物的归属的姓名、病房、各种编号等。
[0025]
关于被检物容器25的内部的被检物25a,凝块层、分离剂(硅)层以及血清层这3层分离地从下方起按顺序配置。在凝块层与分离剂层之间形成第1边界面,在分离剂层与血清层之间形成第2边界面,在血清层上形成被检物液面。
[0026]
标签剥离装置30使得粘贴于被检物容器25的外周面的标签27的至少一部分剥离。标签剥离装置30具有作为容器保持部的容器移动装置40以及切刀移动装置50。这里,标签的剥离包含刮除标签。
[0027]
图1、图2、图6以及图8所示的容器移动装置40例如配置于输送路径20a的一侧的侧方。容器移动装置40例如具有:作为具有能够开闭的一对臂41的卡盘装置的卡盘部42;具有能够开闭的1对按压板43的按压部44;以及具有对卡盘部42以及按压部44进行驱动的驱动机构的容器驱动部45。例如容器驱动部45具有通过使按压部44的一对按压板43、卡盘部42的一对臂41在x方向上往返移动而开闭的驱动缸、使卡盘部42在y方向上往返移动的驱动缸、使卡盘部42在z方向上往返移动的驱动缸。容器移动装置40通过控制部71的控制而使卡盘部42的一对臂41开闭而对保持于拾取位置p01的保持件24的被检物容器25的头部进行把持。另外,容器移动装置40通过控制部71的控制而使对被检物容器进行把持的卡盘部42上升,并且使其在y轴方向上前进并配置于剥离位置p02,通过按压部在3个部位对被检物容器
25的侧部进行把持。而且,在进行剥离处理之后使其在y轴方向上后退,再次下降而使被检物容器25返回至输送路径20a的拾取位置p01,使卡盘部42张开。
[0028]
切刀移动装置50例如配置于输送路径20a的另一侧的侧方。切刀移动装置50具有:供给盒51;切刀保持件52,其具有将切刀支撑为能够移动的切刀轨道52a;回收盒53;移载机构54,其对供给盒51的切刀60进行保持并将其移载至切刀轨道52a的供给位置p11;进给部55,其将供给位置p11的切刀向二次侧的等待位置p12进给;移动部56,其使切刀保持件52进行升降动作而在上升位置p13与等待位置p12之间往返移动;进给部57,其将切刀按顺序向下游侧进给并使其从等待位置p12向回收位置p14移动;以及移载机构58,其从回收位置p14移载至回收盒53。切刀移动装置50构成利用供给盒51、移载机构54以及进给部55而供给新的切刀60的供给部。另外,关于切刀移动装置50,由回收盒53、进给部57以及移载机构58构成对使用完毕的切刀60进行回收的回收部。即,切刀移动装置50具有供给新的切刀60的供给部以及对使用完毕的切刀60进行回收的回收部,成为自动地更换切刀60的切刀更换装置。
[0029]
如图1至图4所示,供给盒51例如具有:收容部51a,其构成为上侧开口的筐状;收容部51a的底板51b;以及驱动机构51c,其使底板51b进行升降移动。供给盒51构成为能够对多个、例如50个切刀进行收容。切刀60例如构成为在一个方向上较长的矩形的薄板状。能够将多个、例如50个左右的切刀60进行重叠放置于供给盒51。供给盒51的收容部51a的一个侧壁设置有能够开闭的盖51d,构成为用户能够从侧方将切刀60插入。例如利用dc电机等驱动机构51c使底板51b移动。在规定的定时(timing)使底板51b升起而将切刀60向上部开口进给。在上部开口设置有传感器。如果传感器检测到供给盒51内不存在刀刃、底板51b已移动至最上部,则控制部71使底板51b下降并停止。
[0030]
切刀60能够利用例如市售的切割刀用的替换刀刃。切刀60例如由钢制的具有规定的宽度及长度的板状部件构成,遍及成为剥离时的移动方向的前端侧的一侧的侧缘部、即上侧的前端缘部的全长而具有锐利地形成的切断边。
[0031]
切刀60配置为在剥离处理时相对于被检物容器25的一个方向的周面而相对,保持为长度方向沿着输送路径延伸的姿态。切刀60在剥离处理时被按压而使得前端缘与被检物容器的表面抵接,以相反的下缘部离开的方式设置为以规定角度倾斜的姿态。例如相对于被检物容器的轴向以大于或等于5度而小于或等于30度的角度、优选大于或等于10度而小于或等于20度、更优选15度左右而倾斜配置。切刀60的缘部与标签27抵接而沿上下方向移动,由此将被检物容器25的标签27的一部分刮除,形成具有规定宽度的窗部27b。
[0032]
如图1至图8所示,切刀保持件52具有:切刀轨道52a,其沿x方向延伸,并且具有在x方向的两端以及正面侧开口的槽部52d;轨道驱动部52b,其使切刀轨道52a移动;以及吸引部52c,其对标签的碎屑进行吸引。切刀轨道52a是配置于切刀的升降路与容器通路之间的框架部件,将切刀60支撑为能够滑动。切刀轨道52a具有沿x方向延伸、且对切刀进行收容的槽部52d。在槽部52d以相对于被检物容器的轴向在10度~30度的范围内倾斜的姿态对切刀进行保持。
[0033]
切刀轨道52a在规定的处理位置具有切割而开口的狭缝52e。在该狭缝52e,切刀60朝向被检物容器25侧露出。切刀轨道52a能够将作为市售的切割刀的切刀60以能够移动的方式保持于槽部52d,使得切刀60的一部分从狭缝52e向被检物容器25侧露出、且在狭缝52e
的两侧进行支撑。即,利用切刀轨道52a以两侧保持的方式对切刀60进行支撑。
[0034]
切刀轨道52a的槽部52d构成使得如下区域在第1方向上连通的切刀路径:中央的处理区域a1,其配置有狭缝52e;供给区域a2,其在处理区域a1的一侧连续地形成且配置于供给盒51的上方;以及回收区域a3,其相对于处理区域a1的另一侧连续且配置于回收盒53的上方。这里,切刀路径具有切刀60的长度的约3倍左右的长度。轨道驱动部52b具有作为使切刀轨道52a进行升降移动的升降驱动部的升降缸,以保持有切刀60的状态使切刀轨道52a进行升降动作而进行将标签剥离的剥离动作。处理区域a1配置为与被检物容器25的移动路径相对。在输送方向上,供给区域a2配置于处理区域a1的一次侧,回收区域a3配置于处理区域a1的二次侧。
[0035]
即,切刀保持件52以能够拆装的方式对切刀60进行保持,在使得切刀60的上端缘即刀刃部与所保持的被检物容器25的侧面接触的位置相对于被检物容器25相对移动,由此进行使得附着于被检物容器25的侧面的标签剥离的剥离处理。
[0036]
吸引部52c设置于切刀保持件52,与切刀保持件52一起移动。吸引部52c具有吸引喷嘴,该吸引喷嘴配置为使得吸入口朝向狭缝52e的下端部的附近,对剥离后的标签的碎屑等剥离片进行吸引。吸引部52c在切刀保持件52对剥离后的标签的碎屑进行吸引,将它们收集至经由管道而与二次侧连接的垃圾箱。
[0037]
供给侧移载机构54具有:保持头54b,其具有多个吸附磁体54a;基座54c,其将保持头54b支撑为能够绕x轴中心转动;以及移载驱动部54d,其使基座54c转动并在x轴方向上移动。移载驱动部54d例如具有使保持头54b升降的气缸54e、使基座54c旋转的旋转电机54f。
[0038]
供给侧移载机构54使保持头54b以朝下的状态而下降,对配置于供给盒51的上表面的切刀60进行吸附保持,使保持头54b上升并转动而使其与切刀轨道52a的切刀路径相对,并且使其沿y轴方向移动,由此将切刀60设置于切刀轨道52a的供给区域a2。
[0039]
供给侧进给部55具有:卡合部55a,其与处于供给区域a2的切刀60卡合;以及进给驱动部55b,其使卡合部55a沿x轴移动。进给驱动部55b例如具有无杆气缸,在x轴方向上往返移动,由此使卡合部55a滑动而使供给区域a2的切刀60进给至处理区域a1。
[0040]
如图7至图9所示,回收侧进给部57具有:保持头57b,其具有多个吸附磁体57a;以及进给驱动部57c,其使保持头57b在x轴方向上移动。进给驱动部57c例如具有:保持缸57d,其使保持头57b在y方向上进行前进后退动作,由此进行吸附保持以及保持的解除;以及进给缸57e,其使保持头57b在x方向上进行前进后退动作。回收侧进给部57使保持头57b在y方向上向接近切刀60的方向前进而对切刀60进行保持,使其向x方向的下游侧移动,使保持头57b向从切刀60离开的方向后退而到达避让位置,返回至上游侧,反复进行上述一系列处理而将切刀60按顺序向下游侧进给,并使其从等待位置p12向回收位置p14移动。例如,对于切刀60的移动,每当进行一定次数的剥离处理时,使切刀60向回收侧移动规定距离,由此使得刀刃部中的配置于狭缝52e而进行剥离处理的部分按顺序错开。例如,每当进行200次剥离处理时,错开5mm。例如如果刀刃的长度为100mm,则当进行20次进给处理时,将处理区域a1的切刀60向回收区域a3进给并配置于回收位置p14。
[0041]
回收侧移载机构58具有:保持头58b,其具有多个吸附磁体58a;基座58c,其对保持头58b进行支撑;以及移载驱动部58d,其使基座58c在x轴方向上移动且转动。移载驱动部58d例如具有使保持头58b升降的气缸58e、使基座58c旋转的旋转电机58f。移载驱动部58d
使切刀60从回收位置p14移载至回收盒53。
[0042]
回收盒53例如具有上侧开口的构成为筐状的收容部。
[0043]
控制装置70具有控制部71、存储部72以及用户界面73。控制部(控制器)71例如为计算机等。控制部71具有包含cpu(central processing unit)、asic(application specific integrated circuit)或者fpga(field programmable gate array)等在内的处理器或者集成电路(控制电路)、以及存储器等存储介质。控制部71可以仅具有1个集成电路等,也可以具有多个集成电路等。控制部71通过执行存储介质等中存储的程序等而进行处理。控制部71对各种驱动机构的动作进行控制。例如控制部71使容器移动机构及切刀移动机构在规定的定时工作,由此进行使切刀在与容器接触的位置进行相对移动而将标签剥离的剥离处理。另外,使切刀移动机构执行动作而将切刀在规定的移动路径按顺序向二次侧进给,由此进行将切刀从供给盒按顺序向处理位置供给的供给处理、在处理位置使切刀的接触位置错开的切刀进给处理、以及将切刀回收至回收盒的回收处理。
[0044]
存储部72作为存储介质而具有硬盘或者nand型闪存。
[0045]
界面73具有接收从各种传感器等输出的数据并暂时保存的功能。另外,还具有对驱动机构送出控制信号的功能、送出接通断开控制信号的功能。另外,界面73具有对分析装置、或者个人计算机等信息终端、打印机等外围装置发送各种数据的功能。
[0046]
根据本实施方式所涉及的被检物处理装置,能够对切刀进行拆装,另外,对应用的切刀的形状的限制较少且通用性较高。例如,在上述实施方式所涉及的被检物处理装置中,可以使用市售的切割刀,与利用超声波切刀的情况相比,能够削减成本。另外,利用由切刀轨道形成的切刀移动路径按顺序对切刀进行进给,由此能够使切刀的位置错开而维持切刀的切割趋势,从而维持剥离性能。并且,使切刀构成为能够自动更换,从而能够实现高性能且卫生的处理,并且能够减少人工作业而实现处理的高效化。
[0047]
另外,利用具有狭缝的切刀保持件对切刀的两侧进行支撑,由此能够将切刀相对于被检物容器维持为规定的接触角度,能够高精度地维持按压力、位置关系。例如,利用较薄且细长的矩形的切刀使得长度方向与被检物容器的轴向相正交且沿成为输送方向的第1方向进行配置,在切刀的宽度方向相对于被检物容器的轴向以规定的角度倾斜的状态下,使其沿被检物容器的轴向移动,由此能够将切刀维持为稳定的位置以及姿态,容易控制切刀的动作、针对被检物容器的按压力。即,例如与对刀刃的基端进行支撑、一边将前端按压于被检物容器一边使其移动的结构相比,能够抑制因刀刃的挠曲等引起的前端的位置的变化、按压力不足,能够确保适当的位置以及按压力。因此,在剥离处理时能够适当地维持切口深度,因此例如能够抑制过深地切入,能够抑制在标签剥离时被检物容器损伤,并且能够高速且可靠地实现剥离处理。
[0048]
此外,本发明并不局限于上述实施方式。例如使切刀移动的具体结构,关于检查处理次序以及检查处理内容等,在不脱离本发明的主旨的范围内能够进行各种变形而实施。例如,标签剥离装置30可以在剥离处理部的上游侧、下游侧设置拍摄装置而获取被检物容器的图像。
[0049]
标签27的剥离部分并不局限于遍及全长地使轴向的一部分剥离,例如可以设为仅将轴向上的一部分剥离的结构,也可以设为使得整个标签27剥离的结构。
[0050]
另外,被检物处理装置可以沿着输送装置20的输送路径20a在标签剥离装置30的
上游侧、下游侧进一步具有进行其他处理的处理装置。例如,作为其他实施方式,如图10所示,可以与其他处理装置并列配置。例如图10所示的被检物处理装置10在标签剥离装置30的下游侧具有拍摄装置80、分析装置90。例如输送装置20或输送路径20a配置为接近或相连续,由此能够在沿输送路径20a对被检物容器25进行输送的过程中按顺序进行处理。另外,作为处理装置,在拍摄装置的基础上,还可以具有基于从拍摄的图像获取的信息而进行分类处理、分析处理的处理装置、读取条形码的读取装置、分类分注装置、开栓装置、闭栓装置、分析装置等各种处理装置。在该情况下,也可以与标签剥离装置组合而将各种处理装置配置于输送路径,在输送处理时按顺序进行一系列处理。
[0051]
在上述实施方式中,举例示出了针对每1个被检物容器25而进行被检物处理的情况,但也可以针对多个被检物容器25同时进行处理。
[0052]
此外,本发明并不限定于上述实施方式,在实施阶段可以在不脱离其主旨的范围内进行各种变形。另外,也可以适当地组合实施各实施方式,在该情况下,能够获得组合效果。并且,上述实施方式中包含各种发明,通过从公开的多个技术特征选择的组合而能够提炼出各种发明。例如,即使从实施方式中公开的所有技术特征中删除几个技术特征,也能够解决问题,在能够获得效果的情况下,删除该技术特征的结构也能够提炼为发明。
[0053]
标号的说明
[0054]
10
…
被检物处理装置、20
…
输送装置、20a
…
输送路径、21
…
导轨、22
…
输送带、24
…
保持件、25
…
被检物容器、25a
…
被检物、27
…
标签、27b
…
窗部、30
…
标签剥离装置、40
…
容器移动装置、41
…
臂、42
…
卡盘部、43
…
按压板、44
…
按压部、45
…
容器驱动部、50
…
切刀移动装置、51
…
供给盒、51a
…
收容部、51b
…
底板、51c
…
驱动机构、51d
…
盖、52
…
切刀保持件、52a
…
切刀轨道、52b
…
轨道驱动部、52c
…
吸引部、52d
…
槽部、52e
…
狭缝、53
…
回收盒、54
…
移载机构、54a
…
吸附磁体、54b
…
保持头、54c
…
基座、54d
…
移载驱动部、54e
…
气缸、54f
…
旋转电机、55
…
进给部、55a
…
卡合部、55b
…
进给驱动部、56
…
移动部、57
…
进给部、57a
…
吸附磁体、57b
…
保持头、57c
…
进给驱动部、57d
…
保持缸、57e
…
进给缸、58
…
移载机构、58
…
回收侧移载机构、58a
…
吸附磁体、58b
…
保持头、58c
…
基座、58d
…
移载驱动部、58e
…
气缸、58f
…
旋转电机、60
…
切刀、70
…
控制装置、71
…
控制部、72
…
存储部、73
…
界面、80
…
拍摄装置、90
…
分析装置、91
…
界面部、a1
…
处理区域、a2
…
供给区域、a3
…
回收区域、p01
…
拾取位置、p02
…
剥离位置、p03
…
等待位置、p04
…
回收位置、p11
…
供给位置、p12
…
等待位置、p13
…
上升位置、p14
…
回收位置、p4
…
回收位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。