1.本发明涉及一种材料测试机以及材料测试机的控制方法。
背景技术:
2.在材料测试机中,已知有去除传感器所输出的检测信号中所含的噪声成分的各种技术。
3.例如,专利文献1所记载的材料测试机中记载了:从原始数据中检测断裂点来作为变化点,在断裂点的前后对数据进行分割而获得分割数据,针对每个分割数据来执行低通滤波处理,当所有分割数据的滤波处理结束时,在断裂点的前后分别重构固有振动频率已被去除的时间序列数据,并在断裂点处连接重构数据。
4.[现有技术文献]
[0005]
[专利文献]
[0006]
[专利文献1]日本专利特开2019-56614号公报
技术实现要素:
[0007]
[发明所要解决的问题]
[0008]
但是,专利文献1所记载的材料测试机中,每当测试片的材质及形状、抓持件的种类等发生变化时,作业者必须调整低通滤波器等滤波器的频率特性,从而造成作业者的负担。
[0009]
传感器所输出的检测信号中所含的噪声成分为高频的情况多,因此,例如若降低低通滤波器的截止频率,便能够充分去除噪声成分,但检测信号的响应性有时会下降。相反,若提高低通滤波器的截止频率,则检测信号的响应性将提高,但有时无法充分去除噪声成分。
[0010]
本发明是有鉴于此种情况而完成,其目的在于提供一种能够减轻作业者的负担的材料测试机。
[0011]
[解决问题的技术手段]
[0012]
本发明的第一形态的材料测试机包括:处理滤波器,去除传感器所输出的检测信号中所含的噪声成分;以及调整部,调整所述处理滤波器的频率特性。
[0013]
本发明的第二形态为材料测试机的控制方法,其中所述材料测试机包括处理滤波器,所述处理滤波器去除传感器所输出的检测信号中所含的噪声成分,所述材料测试机的控制方法包括:调整步骤,调整所述处理滤波器的频率特性。
[0014]
[发明的效果]
[0015]
本发明的第一形态的材料测试机以及本发明的第二形态的材料测试机的控制方法分别调整处理滤波器的频率特性,所述处理滤波器去除传感器所输出的检测信号中所含的噪声成分。因此,能够减轻作业者的负担。
附图说明
[0016]
图1是表示本实施方式的拉伸测试机的结构的一例的图。
[0017]
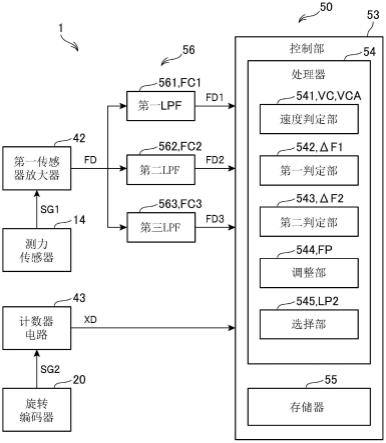
图2是表示本实施方式的控制电路单元的结构的一例的图。
[0018]
图3是表示本实施方式的控制部的处理的一例的流程图。
[0019]
[符号的说明]
[0020]
1:拉伸测试机(材料测试机)
[0021]
2:拉伸测试机本体
[0022]
4:控制单元
[0023]
10:十字头
[0024]
12:负载机构
[0025]
14:测力传感器(传感器)
[0026]
15:位移传感器
[0027]
20:旋转编码器
[0028]
21:上抓持件
[0029]
22:下抓持件
[0030]
26:平台
[0031]
28、29:丝杠
[0032]
30:统括控制装置
[0033]
32:显示装置(显示器)
[0034]
34:测试程序执行装置
[0035]
40:信号输入/输出单元
[0036]
42:第一传感器放大器
[0037]
43:计数器电路
[0038]
44:伺服放大器
[0039]
45:第二传感器放大器
[0040]
50:控制电路单元
[0041]
51:通信部
[0042]
52:反馈控制部
[0043]
53:控制部
[0044]
54:处理器
[0045]
541:速度判定部
[0046]
542:第一判定部
[0047]
543:第二判定部
[0048]
544:调整部
[0049]
545:选择部
[0050]
55:存储器
[0051]
56:低通滤波器
[0052]
561:第一低通滤波器
[0053]
562:第二低通滤波器563:第三低通滤波器
[0054]
fa:响应频率
[0055]
fc:截止频率
[0056]
fc1:第一频率
[0057]
fc2:第二频率
[0058]
fc3:第三频率
[0059]
fd:测试力测量值
[0060]
fd1:第一测试力测量值
[0061]
fd2:第二测试力测量值
[0062]
fd3:第三测试力测量值
[0063]
fp:处理滤波器
[0064]
lp2:两个低通滤波器
[0065]
sg1:测试力测定信号
[0066]
sg2:旋转测定信号
[0067]
sg3:伸展测定信号
[0068]
tp:测试片
[0069]
vc:移动速度
[0070]
vca:阈值
[0071]
xd:位移测量值
[0072]
δf1:第一阈值
[0073]
δf2:第二阈值
具体实施方式
[0074]
以下,参照附图来说明本实施方式。
[0075]
[1.拉伸测试机的结构]
[0076]
图1是表示本实施方式的拉伸测试机1的结构的一例的图。
[0077]
本实施方式的拉伸测试机1对测试片tp给予测试力f,进行对试料的拉伸强度、屈服点、伸展、收缩等机械性质进行测定的拉伸测试。测试力f为拉伸力。
[0078]
拉伸测试机1包括:拉伸测试机本体2,对作为测试对象的材料即测试片tp给予测试力f,以进行拉伸测试;以及控制单元4,控制拉伸测试机本体2所进行的拉伸测试动作。
[0079]
另外,拉伸测试机1对应于“材料测试机”的一例。
[0080]
测试机本体2包括:平台26;一对丝杠28、29,在朝向铅垂方向的状态下可旋转地竖立设置在所述平台26上;十字头10,可沿着这些丝杠28、29移动;负载机构12,使所述十字头10移动而对测试片tp给予负载;以及测力传感器14。测力传感器14是对给予至测试片tp的拉伸载荷即测试力f进行测定,并输出测试力测定信号sg1的传感器。
[0081]
负载机构12包括:蜗杆减速机16、蜗杆减速机17,连结于各丝杠28、29的下端部;伺服马达18,连结于各蜗杆减速机16、17;以及旋转编码器20。旋转编码器20是对伺服马达18的旋转量进行测定,并将与旋转量相应的脉冲数的旋转测定信号sg2输出至控制单元4的传感器。
[0082]
并且,负载机构12经由蜗杆减速机16、蜗杆减速机17而将伺服马达18的旋转传递
至一对丝杠28、29,通过各丝杠28、29同步地旋转,从而十字头10沿着丝杠28、丝杠29而升降。
[0083]
在十字头10,附设有握持测试片tp的上端部的上抓持件21,在平台26,附设有握持测试片tp的下端部的下抓持件22。测试机本体2在拉伸测试时,在通过上抓持件21以及下抓持件22来握持着测试片tp的两端部的状态下,通过控制单元4的控制来使十字头10上升,由此来对测试片tp给予测试力f。
[0084]
在测试片tp配置有位移传感器15。测试片tp例如使用中央变细地形成的哑铃型测试片。位移传感器15是对测试片tp的一对计量标点之间的距离进行测定,由此来测定伸展测量值ed,并输出伸展测定信号sg3的传感器。一对计量标点被配置在测试片tp变细的区域的上部与下部。
[0085]
控制单元4包括统括控制装置30、显示装置32以及测试程序执行装置34。
[0086]
统括控制装置30是对测试机本体2进行中枢控制的装置,与测试机本体2之间可收发信号地连接。从测试机本体2接收的信号是测力传感器14所输出的测试力测定信号sg1、旋转编码器20所输出的旋转测定信号sg2、位移传感器15所输出的伸展测定信号sg3、以及控制或测试所需的适当的信号等。
[0087]
显示装置32包括液晶显示器(liquid crystal display,lcd)等,是基于从统括控制装置30输入的信号来显示各种信息的装置。例如,统括控制装置30在拉伸测试的期间,基于伸展测定信号sg3而将测试片tp的伸展的测定值即伸展测量值ed显示于显示装置32。而且,例如,统括控制装置30在拉伸测试的期间,将表示基于旋转测定信号sg2的十字头10的位移的位移测量值xd显示于显示装置32。
[0088]
显示装置32对应于“显示器”的一例。
[0089]
拉伸测试程序执行装置34是具备受理拉伸测试的测试条件等各种设定参数的设定操作或执行指示操作等的用户操作并输出至统括控制装置30的功能、或对测试力测量值fd的数据进行分析的功能等的装置。
[0090]
接下来,进一步说明本实施方式的统括控制装置30。统括控制装置30包括信号输入/输出单元40与控制电路单元50。
[0091]
信号输入/输出单元40构成与测试机本体2之间收发信号的输入/输出接口电路,本实施方式中,具有第一传感器放大器42、第二传感器放大器45、计数器电路43以及伺服放大器44。
[0092]
第一传感器放大器42是对测力传感器14所输出的测试力测定信号sg1进行放大并输出至控制电路单元50的放大器。
[0093]
第二传感器放大器45是对位移传感器15所输出的伸展测定信号sg3进行放大并输出至控制电路单元50的放大器。
[0094]
计数器电路43对旋转编码器20所输出的旋转测定信号sg2的脉冲数进行计数,并将伺服马达18的旋转量,即,表示通过伺服马达18的旋转而升降的十字头10的位移测量值xd的位移测定信号a3以数字信号输出至控制电路单元50。
[0095]
伺服放大器44是通过控制电路单元50的控制来控制伺服马达18的装置。
[0096]
控制电路单元50包括通信部51、反馈控制部52以及控制部53。
[0097]
控制部53包括处理器54与存储器55。
[0098]
参照图2来说明控制部53、处理器54以及存储器55。
[0099]
控制电路单元50包括计算机,所述计算机包括硬盘驱动器(hard disk drive,hdd)或固态硬盘(solid state drive,ssd)等贮存器装置、与信号输入/输出单元40的接口电路、与拉伸测试程序执行装置34进行通信的通信装置、控制显示装置32的显示控制电路、以及各种电子电路。
[0100]
而且,通过控制电路单元50的控制部53的处理器54执行存储在存储器55或贮存器装置中的控制程序,从而实现图1所示的各功能部。
[0101]
而且,在与信号输入/输出单元40的接口电路中设有模拟/数字(analog/digital,a/d)转换器,作为模拟信号的测试力测定信号sg1以及伸展测定信号sg3通过a/d转换器而转换为数字信号。
[0102]
另外,控制电路单元50并不限于计算机,也可包含集成电路(integrated circuit,ic)芯片或大规模集成电路(large scale integrated circuit,lsi)等集成电路之类的一个或多个适当的电路。
[0103]
通信部51与拉伸测试程序执行装置34之间进行通信,从测试程序执行装置34接收测试条件的设定或各种设定参数的设定值、拉伸测试的执行指示或中断指示等。而且,通信部51在适当的时机将基于伸展测定信号sg3的伸展测量值ed以及基于测试力测定信号sg1的测试力测量值fd发送至拉伸测试程序执行装置34。而且,通信部51在适当的时机将基于旋转测定信号sg2的位移测量值xd发送至拉伸测试程序执行装置34。
[0104]
反馈控制部52对测试机本体2的伺服马达18进行反馈控制而执行拉伸测试。反馈控制部52是执行伺服马达18的反馈控制的电路。
[0105]
在反馈控制部52执行位置控制的情况下,反馈控制部52例如对于测力传感器14所输出的测试力测量值fd执行位置控制。此时,反馈控制部52以使测试力测量值fd与测试力目标值ft一致的方式来运算位移测量值xd的指令值dx,并将表示所述指令值dx的指令信号a4输出至伺服放大器44。另外,测试力目标值ft表示测试力测量值fd的目标值。
[0106]
另外,所谓“位置控制”,是指进行控制,以使由传感器等所测定出的检测值与其目标值一致。
[0107]
另外,对执行位置控制的情况进行说明,但反馈控制部52也可执行速度控制。所谓“速度控制”,是指进行控制,以使由传感器等所测定出的检测值的每单位时间的变化量与其目标值一致。
[0108]
[2.控制电路单元的结构]
[0109]
图2是表示本实施方式的控制电路单元50的结构的一例的图。
[0110]
控制部53例如包含个人计算机,对控制电路单元50的动作进行控制。控制部53包括处理器54与存储器55。
[0111]
处理器54包含中央处理器(central processing unit,cpu)或微处理器(micro processing unit,mpu)等。
[0112]
存储器55包含只读存储器(read only memory,rom)或随机存取存储器(random access memory,ram)等。
[0113]
另外,控制部53并不限于个人计算机,也可包含ic芯片或lsi等集成电路之类的一个或多个适当的电路。而且,控制部53例如也可包含平板终端或智能电话等。
[0114]
而且,控制部53也可包括数字信号处理器(digital signal processor,dsp)或现场可编程门阵列(field programmable gate array,fpga)等经编程的硬件。而且,控制部53也可包括芯片级系统(system-on-a-chip,soc)-fpga。
[0115]
控制电路单元50例如还包括低通滤波器56。
[0116]
低通滤波器56例如是不使测力传感器14的检测信号即测试力测定信号sg1中的、频率比截止频率fc低的成分衰减,而使频率比截止频率fc高的成分衰减的滤波器。
[0117]
具体而言,测力传感器14将其检测信号即测试力测定信号sg1输出至第一传感器放大器42。第一传感器放大器42对测试力测定信号sg1进行放大并将测试力测量值fd输出至低通滤波器56。低通滤波器56不使测试力测量值fd中的、频率比截止频率fc低的成分衰减,而使频率比截止频率fc高的成分衰减。
[0118]
低通滤波器56对应于“处理滤波器”的一例。
[0119]
本实施方式中,对处理滤波器为低通滤波器56的情况进行说明,但只要处理滤波器去除传感器所输出的检测信号中所含的噪声成分即可。例如,处理滤波器也可为带通滤波器。
[0120]
而且,本实施方式中,对低通滤波器56使测力传感器14的检测信号即测试力测定信号sg1中所含的高频成分衰减的情况进行说明,但本发明的实施方式并不限定于此。低通滤波器56只要使配置于拉伸测试机1的传感器的检测信号中所含的高频成分衰减即可。例如,低通滤波器56也可使位移传感器15的检测信号即伸展测定信号sg3中所含的高频成分衰减。
[0121]
即,测力传感器14对应于“传感器”的一例。
[0122]
换言之,本实施方式中,对“传感器”为测力传感器14的情况进行说明,但“传感器”例如也可为位移传感器15。
[0123]
低通滤波器56包括第一低通滤波器561、第二低通滤波器562以及第三低通滤波器563。
[0124]
对于第一低通滤波器561~第三低通滤波器563分别输入测试力测量值fd。换言之,第一低通滤波器561~第三低通滤波器563分别使测力传感器14的检测信号即测试力测定信号sg1中所含的高频成分衰减。
[0125]
第一低通滤波器561与第二低通滤波器562以及第三低通滤波器563各自相比较,响应性良好地构成。
[0126]
第一低通滤波器561的截止频率fc为第一频率fc1。第一频率fc1例如被设定为比拉伸测试机1的控制所需的响应频率fa高。响应频率fa例如为100hz。第一频率fc1例如为300hz。第一低通滤波器561向控制部53输出第一测试力测量值fd1。
[0127]
第一低通滤波器561对应于“两个低通滤波器”的一例。
[0128]
第二低通滤波器562与第一低通滤波器561相比较,高频噪声的去除性能良好地构成,且与第三低通滤波器563相比较,响应性良好地构成。
[0129]
第二低通滤波器562的截止频率fc为第二频率fc2。第二频率fc2被设定为比第一频率fc1低。第二频率fc2例如为3hz。第二低通滤波器562向控制部53输出第二测试力测量值fd2。
[0130]
第二低通滤波器562对应于“两个低通滤波器”的一例。
[0131]
而且,第二低通滤波器562对应于“处理滤波器”的一例。
[0132]
第三低通滤波器563与第一低通滤波器561以及第二低通滤波器562各自相比较,高频噪声的去除性能良好地构成。
[0133]
第三低通滤波器563的截止频率fc为第三频率fc3。第三频率fc3被设定为比第二频率fc2低。第三频率fc3例如为0.3hz。第三低通滤波器563向控制部53输出第三测试力测量值fd3。
[0134]
第三低通滤波器563对应于“两个低通滤波器”的一例。
[0135]
而且,第三低通滤波器563对应于“处理滤波器”的一例。
[0136]
对于控制部53,除了第一测试力测量值fd1~第三测试力测量值fd3以外,还从计数器电路43输入位移测量值xd。位移测量值xd表示十字头10的位移。位移测量值xd是由计数器电路43基于旋转编码器20所输出的旋转测定信号sg2而生成。
[0137]
本实施方式中,低通滤波器56包括三个低通滤波器,即,第一低通滤波器561~第三低通滤波器563,但低通滤波器56也可包含两个低通滤波器。此时,能够简化结构与处理。而且,低通滤波器56也可包括四个以上的低通滤波器。此时,可更适当地调整处理滤波器fp的频率特性。
[0138]
[3.控制部的结构]
[0139]
如图2所示,控制部53包括速度判定部541、第一判定部542、第二判定部543、调整部544以及选择部545。
[0140]
具体而言,控制部53的处理器54通过执行存储在存储器55或贮存器装置中的控制程序,从而作为速度判定部541、第一判定部542、第二判定部543、调整部544以及选择部545发挥功能。
[0141]
速度判定部541算出十字头10的移动速度vc,判定移动速度vc是否为阈值vca以上。
[0142]
速度判定部541基于从计数器电路43输入的位移测量值xd来算出移动速度vc。具体而言,速度判定部541算出每单位时间的位移测量值xd的变化量来作为移动速度vc。
[0143]
第一判定部542判定由选择部545所选择的两个低通滤波器lp2的输出信号之差是否为第一阈值δf1以上。
[0144]
第一阈值δf1是基于测试力测量值fd的满量程(full scale)fs来设定。例如,第一阈值δf1被设定为测试力测量值fd的满量程fs的1/20000的值。
[0145]
在选择部545例如选择了第一低通滤波器561与第二低通滤波器562来作为两个低通滤波器lp2的情况下,第一判定部542判定第一测试力测量值fd1与第二测试力测量值fd2之差的绝对值是否为第一阈值δf1以上。
[0146]
第二判定部543判定由选择部545所选择的两个低通滤波器lp2的输出信号之差是否为第二阈值δf2以下。
[0147]
第二阈值δf2被设定为比第一阈值δf1大的值。例如,第二阈值δf2被设定为第一阈值δf1的两倍的值。
[0148]
在选择部545例如选择了第一低通滤波器561与第三低通滤波器563来作为两个低通滤波器lp2的情况下,第二判定部543判定第一测试力测量值fd1与第三测试力测量值fd3之差的绝对值是否为第二阈值δf2以下。
[0149]
若速度判定部541判定为移动速度vc为阈值vca以上,则调整部544设定第三低通滤波器563来作为处理滤波器fp。阈值vca是基于实验结果等来预先设定。
[0150]
若速度判定部541判定为移动速度vc小于阈值vca,则调整部544调整处理滤波器fp的频率特性。处理滤波器fp去除测力传感器14所输出的测试力测定信号sg1中所含的噪声成分。
[0151]
处理滤波器fp的输出信号是作为显示于显示装置32的显示信号而使用。
[0152]
调整部544输入测力传感器14所输出的测试力测定信号sg1,并基于频率特性互不相同的两个低通滤波器lp2的输出信号之差来调整处理滤波器fp的频率特性。
[0153]
具体而言,处理滤波器fp包含低通滤波器,调整部544根据第一判定部542的判定结果来减少处理滤波器fp的截止频率。
[0154]
更具体而言,调整部544根据第一判定部542的判定结果,将处理滤波器fp由第二低通滤波器562切换为第三低通滤波器563。即,若由选择部545所选择的两个低通滤波器lp2的输出信号之差为第一阈值δf1以上,则调整部544将处理滤波器fp由第二低通滤波器562切换为第三低通滤波器563。
[0155]
例如,在选择部545选择了第一低通滤波器561与第二低通滤波器562来作为两个低通滤波器lp2的情况下,第一判定部542判定第一测试力测量值fd1与第二测试力测量值fd2之差的绝对值是否为第一阈值δf1以上。并且,若第一判定部542判定为第一测试力测量值fd1与第三测试力测量值fd3之差的绝对值为第一阈值δf1以上,则调整部544将处理滤波器fp由第二低通滤波器562切换为第三低通滤波器563。
[0156]
而且,调整部544根据第二判定部543的判定结果来增加处理滤波器fp的截止频率。
[0157]
具体而言,调整部544根据第二判定部543的判定结果,将处理滤波器fp由第三低通滤波器563切换为第二低通滤波器562。即,若由选择部545所选择的两个低通滤波器lp2的输出信号之差为第二阈值δf2以下,则调整部544将处理滤波器fp由第三低通滤波器563切换为第二低通滤波器562。
[0158]
例如,在选择部545选择了第一低通滤波器561与第三低通滤波器563来作为两个低通滤波器lp2的情况下,第二判定部543判定第一测试力测量值fd1与第三测试力测量值fd3之差的绝对值是否为第二阈值δf2以下。并且,若第二判定部543判定为第一测试力测量值fd1与第三测试力测量值fd3之差的绝对值为第二阈值δf2以下,则调整部544将处理滤波器fp由第三低通滤波器563切换为第二低通滤波器562。
[0159]
选择部545从第一低通滤波器561~第三低通滤波器563中选择两个低通滤波器lp2。
[0160]
例如,在设定了第三低通滤波器563来作为处理滤波器fp的情况下,选择部545选择第一低通滤波器561与第三低通滤波器563来作为两个低通滤波器lp2。
[0161]
而且,例如在设定了第二低通滤波器562来作为处理滤波器fp的情况下,选择部545选择第一低通滤波器561与第二低通滤波器562来作为两个低通滤波器lp2。
[0162]
换言之,选择部545选择第一低通滤波器561、与被设定为处理滤波器fp的低通滤波器,来作为两个低通滤波器lp2。
[0163]
选择部545选择第一低通滤波器561、与被设定为处理滤波器fp的低通滤波器,来
作为两个低通滤波器lp2。因此,调整部544能够基于第一判定部542的判定结果以及第二判定部543的判定结果,而在第三低通滤波器563与第二低通滤波器562之间适当地切换处理滤波器fp。
[0164]
即,两个低通滤波器lp2中的其中一者是第一低通滤波器561,因此调整部544能够基于响应性良好的第一测试力测量值fd1来调整处理滤波器fp的频率特性。
[0165]
而且,两个低通滤波器lp2中的另一者是被设定为处理滤波器fp的低通滤波器,因此调整部544能够基于作为显示于显示装置32的显示信号而使用的信号来调整处理滤波器fp的频率特性。
[0166]
在移动速度vc为零的情况下,即,在十字头10已停止的情况下,由于移动速度vc小于阈值vca,因此调整部544调整处理滤波器fp的频率特性。即,在十字头10已停止的情况下,通过调整部544来适当地调整处理滤波器fp的频率特性。
[0167]
另一方面,为了满足决定拉伸测试机1适当与否的检定条件,在十字头10已停止的状态下,噪声成分必须为规定值以下。
[0168]
本实施方式的拉伸测试机1在十字头10已停止的状态下,适当地调整处理滤波器fp的频率特性,因此可提高满足检定条件的可能性。
[0169]
[4.控制部的动作]
[0170]
接下来,参照图3来说明控制部53的处理。
[0171]
图3是表示本实施方式的控制部53的处理的一例的流程图。
[0172]
首先,在步骤s101中,速度判定部541算出十字头10的移动速度vc,并判定移动速度vc是否为阈值vca以上。
[0173]
若速度判定部541判定为移动速度vc为阈值vca以上(步骤s101;是),则处理前进至步骤s103。
[0174]
接下来,在步骤s103中,调整部544将第三低通滤波器563设定为处理滤波器fp。随后,处理返回步骤s101。
[0175]
若速度判定部541判定为移动速度vc并非阈值vca以上(步骤s101;否),则处理前进至步骤s105。
[0176]
接下来,在步骤s105中,调整部544判定是否设定了第二低通滤波器562来作为处理滤波器fp。
[0177]
若调整部544判定为尚未设定第二低通滤波器562来作为处理滤波器fp(步骤s105;否),即,若设定了第三低通滤波器563来作为处理滤波器fp,则处理前进至步骤s117。若调整部544判定为已设定了第二低通滤波器562来作为处理滤波器fp(步骤s105;是),则处理前进至步骤s107。
[0178]
接下来,在步骤s107中,选择部454选择第一低通滤波器561以及第二低通滤波器562来作为两个低通滤波器lp2,第一判定部542获取第一测试力测量值fd1。
[0179]
接下来,在步骤s109中,第一判定部542获取第二测试力测量值fd2。
[0180]
接下来,在步骤s111中,第一判定部542算出第一测试力测量值fd1与第二测试力测量值fd2的差值,即,第一测试力测量值fd1与第二测试力测量值fd2之差的绝对值。
[0181]
接下来,在步骤s113中,第一判定部542判定第一测试力测量值fd1与第二测试力测量值fd2的差值是否为第一阈值δf1以上。
[0182]
若第一判定部542判定为第一测试力测量值fd1与第二测试力测量值fd2的差值并非第一阈值δf1以上(步骤s113;否),则处理返回步骤s101。若第一判定部542判定为第一测试力测量值fd1与第二测试力测量值fd2的差值为第一阈值δf1以上(步骤s113;是),则处理前进至步骤s115。
[0183]
接下来,在步骤s115中,调整部544将处理滤波器fp由第二低通滤波器562切换为第三低通滤波器563。随后,处理返回步骤s101。
[0184]
若调整部544判定为尚未设定第二低通滤波器562来作为处理滤波器fp(步骤s105;否),即,若已设定了第三低通滤波器563来作为处理滤波器fp,则在步骤s117中,选择部454选择第一低通滤波器561以及第三低通滤波器563来作为两个低通滤波器lp2,第二判定部543获取第一测试力测量值fd1。
[0185]
接下来,在步骤s119中,第二判定部543获取第三测试力测量值fd3。
[0186]
接下来,在步骤s121中,第二判定部543算出第一测试力测量值fd1与第三测试力测量值fd3的差值,即,第一测试力测量值fd1与第三测试力测量值fd3之差的绝对值。
[0187]
接下来,在步骤s123中,第二判定部543判定第一测试力测量值fd1与第三测试力测量值fd3的差值是否为第二阈值δf2以下。
[0188]
若第二判定部543判定为第一测试力测量值fd1与第三测试力测量值fd3的差值并非第二阈值δf2以下(步骤s123;否),则处理返回步骤s101。若第二判定部543判定为第一测试力测量值fd1与第三测试力测量值fd3的差值为第二阈值δf2以下(步骤s123;是),则处理前进至步骤s125。
[0189]
接下来,在步骤s125中,调整部544将处理滤波器fp由第三低通滤波器563切换为第二低通滤波器562。随后,处理返回步骤s101。
[0190]
步骤s115以及步骤s125对应于“调整步骤”的一例。
[0191]
这样,调整部544调整处理滤波器fp的频率特性,所述处理滤波器fp去除测力传感器14所输出的测试力测量值fd中所含的噪声成分。因此,能够减轻作业者的负担。
[0192]
具体而言,若第一判定部542判定为第一测试力测量值fd1与第二测试力测量值fd2之差的绝对值为第一阈值δf1以上,则调整部544将处理滤波器fp由第二低通滤波器562切换为第三低通滤波器563。因此,能够适当地去除高频噪声。
[0193]
而且,若第二判定部543判定为第一测试力测量值fd1与第三测试力测量值fd3之差的绝对值为第二阈值δf2以下,则调整部544将处理滤波器fp由第三低通滤波器563切换为第二低通滤波器562。因此,能够适当地提高处理滤波器fp的响应性。
[0194]
而且,若移动速度vc为阈值vca以上,则通过调整部544将处理滤波器fp设定为第三低通滤波器563。若移动速度vc为阈值vca以上,则由于高频噪声的振幅大,因此将处理滤波器fp设定为第三低通滤波器563,由此,能够适当地抑制高频噪声。
[0195]
[5.形态与效果]
[0196]
本领域技术人员当理解,所述的实施方式以及变形例为以下的形态的具体例。
[0197]
(第一项)
[0198]
第一形态的材料测试机包括:处理滤波器,去除传感器所输出的检测信号中所含的噪声成分;以及调整部,调整所述处理滤波器的频率特性。
[0199]
根据第一项所述的材料测试机,包括:处理滤波器,去除传感器所输出的检测信号
中所含的噪声成分;以及调整部,调整所述处理滤波器的频率特性。
[0200]
因而,不需要作业者调整处理滤波器的频率特性。因此,能够减轻作业者的负担。
[0201]
(第二项)
[0202]
第一项所述的材料测试机中,使用所述处理滤波器的输出信号来作为显示于显示器的显示信号。
[0203]
根据第二项所述的材料测试机,使用所述处理滤波器的输出信号来作为显示于显示器的显示信号。
[0204]
因而,能够通过处理滤波器来适当地去除显示信号中所含的噪声成分。因此,能够将适当的显示信号显示于显示器。
[0205]
(第三项)
[0206]
第一项或第二项所述的材料测试机中,所述调整部输入所述传感器所输出的检测信号,并基于频率特性互不相同的两个低通滤波器的输出信号之差来调整所述处理滤波器的频率特性。
[0207]
根据第三项所述的材料测试机,所述调整部输入所述传感器所输出的检测信号,并基于频率特性互不相同的两个低通滤波器的输出信号之差来调整所述处理滤波器的频率特性。
[0208]
因此,调整部能够适当地调整处理滤波器的频率特性。
[0209]
(第四项)
[0210]
第三项所述的材料测试机中,还包括:第一判定部,判定所述两个低通滤波器的输出信号之差是否为第一阈值以上,所述处理滤波器包含低通滤波器,所述调整部根据所述第一判定部的判定结果来减少所述处理滤波器的截止频率。
[0211]
根据第四项所述的材料测试机,当所述两个低通滤波器的输出信号之差为第一阈值以上时,所述调整部减少所述处理滤波器的截止频率。
[0212]
因此,调整部能够适当地去除处理滤波器的输出中所含的高频噪声。
[0213]
(第五项)
[0214]
第四项所述的材料测试机中,包括:第一低通滤波器,截止频率为第一频率;第二低通滤波器,截止频率为低于所述第一频率的第二频率;第三低通滤波器,截止频率为低于所述第二频率的第三频率;以及选择部,从所述第一低通滤波器、所述第二低通滤波器以及所述第三低通滤波器中选择所述两个低通滤波器,在设定了所述第二低通滤波器来作为所述处理滤波器的情况下,所述选择部选择所述第一低通滤波器与所述第二低通滤波器来作为所述两个低通滤波器,所述调整部根据所述第一判定部的判定结果,将所述处理滤波器由所述第二低通滤波器切换为所述第三低通滤波器。
[0215]
根据第五项所述的材料测试机,当所述两个低通滤波器的输出信号之差为第一阈值以上时,所述调整部将所述处理滤波器由所述第二低通滤波器切换为所述第三低通滤波器。
[0216]
因此,能够利用简易的结构来适当地去除处理滤波器的输出中所含的高频噪声。
[0217]
(第六项)
[0218]
第三项所述的材料测试机中,还包括:第二判定部,判定所述两个低通滤波器的输出信号之差是否为第二阈值以下,所述处理滤波器包含低通滤波器,所述调整部根据所述
第二判定部的判定结果来增加所述处理滤波器的截止频率。
[0219]
根据第六项所述的材料测试机,当所述两个低通滤波器的输出信号之差为第二阈值以下时,所述调整部增加所述处理滤波器的截止频率。
[0220]
因此,调整部能够适当地提高处理滤波器的响应性。
[0221]
(第七项)
[0222]
第六项所述的材料测试机中,包括:第一低通滤波器,截止频率为第一频率;第二低通滤波器,截止频率为低于所述第一频率的第二频率;以及第三低通滤波器,截止频率为低于所述第二频率的第三频率,且所述材料测试机包括选择部,所述选择部从所述第一低通滤波器、所述第二低通滤波器以及所述第三低通滤波器中选择所述两个低通滤波器,在设定了所述第三低通滤波器来作为所述处理滤波器的情况下,所述选择部选择所述第一低通滤波器与所述第三低通滤波器来作为所述两个低通滤波器,所述调整部根据所述第二判定部的判定结果,将所述处理滤波器由所述第三低通滤波器切换为所述第二低通滤波器。
[0223]
根据第七项所述的材料测试机,当所述两个低通滤波器的输出信号之差为第二阈值以下时,所述调整部将所述处理滤波器由所述第三低通滤波器切换为所述第二低通滤波器。
[0224]
因此,能够利用简易的结构来适当地提高处理滤波器的响应性。
[0225]
(第八项)
[0226]
第二形态的材料测试机的控制方法中,所述材料测试机包括处理滤波器,所述处理滤波器去除传感器所输出的检测信号中所含的噪声成分,所述材料测试机的控制方法包括:调整步骤,调整所述处理滤波器的频率特性。
[0227]
根据第八项所述的材料测试机的控制方法,起到与第一项所述的材料测试机同样的作用效果。
[0228]
[6.其他实施方式]
[0229]
另外,本实施方式的拉伸测试机1不过是本发明的材料测试机的形态的例示,在不脱离本发明的主旨的范围内可任意地变形以及应用。
[0230]
例如,本实施方式中,对材料测试机为拉伸测试机1的情况进行了说明,但本实施方式并不限定于此。只要材料测试机可对测试片tp赋予测试力,使测试片tp发生变形而进行材料测试即可。例如,材料测试机也可为压缩测试机、弯曲测试机或扭曲测试机。
[0231]
而且,本实施方式中,对“传感器”为测力传感器14的情况进行了说明,但“传感器”例如也可为位移传感器15。
[0232]
而且,本实施方式中,处理滤波器fp包含低通滤波器,但处理滤波器fp只要去除传感器所输出的检测信号中所含的噪声成分即可。处理滤波器fp例如也可包含带通滤波器。
[0233]
而且,本实施方式中,低通滤波器56包括三个低通滤波器,即,第一低通滤波器561~第三低通滤波器563,但低通滤波器56也可包含两个低通滤波器。此时,能够简化结构与处理。而且,低通滤波器56也可包括四个以上的低通滤波器。此时,能够更适当地调整处理滤波器fp的频率特性。
[0234]
而且,图1以及图2所示的各功能部是表示功能结构者,具体的实现形态并无特别限制。即,未必需要安装与各功能部独立地对应的硬件,当然也可采用通过一个处理器执行程序来实现多个功能部的功能的结构。而且,也可利用硬件来实现在所述实施方式中通过
软件而实现的功能的一部分,或者,还可利用软件来实现通过硬件而实现的功能的一部分。
[0235]
而且,为了便于理解控制部53的处理,图3所示的流程图的处理单位是根据主要的处理内容而分割。并不受图3的流程图所示的处理单位的分割方式或名称而限制,也能根据处理内容而分割为更多的处理单位,还能以一个处理单位包含更多的处理的方式来进行分割。而且,所述的流程图的处理顺序也不限于图示的示例。
[0236]
而且,拉伸测试机1的控制方法能够通过使控制部53所包括的处理器54执行与拉伸测试机1的控制方法对应的控制程序来实现。而且,所述控制程序也能预先记录在可由计算机读取地记录的记录介质中。作为记录介质,可使用磁记录介质、光学记录介质或半导体存储器件。具体而言,可列举软盘、hdd、只读光盘(compact disk read only memory,cd-rom)、数字多功能光盘(digital versatile disc,dvd)、蓝光(blu-ray(注册商标))光盘、光磁盘、快闪存储器、卡型记录介质等便携式或固定式的记录介质。而且,记录介质也可为控制部53所包括的内部存储装置即ram、rom、hdd等非易失性存储装置。而且,也可使与拉伸测试机1的控制方法对应的控制程序存储在服务器装置等中,通过从服务器装置将控制程序下载至控制部53,由此来实现拉伸测试机1的控制方法。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
