1.本发明涉及计算机人工智能设备技术领域,具体是一种用于计算机人工智能设备的隐藏式保护机构。
背景技术:
2.人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等。随着社会的发展,计算机人工智能设备逐渐应用到我们的日常生活中。
3.现有的用于计算机人工智能设备的保护机构普遍较为传统,隐蔽性差,影响计算机人工智能设备的美观,且防护效果差,难以实现对计算机人工智能设备的充分保护。因此,针对以上现状,迫切需要提供一种用于计算机人工智能设备的隐藏式保护机构,以克服当前实际应用中的不足。
技术实现要素:
4.本发明实施例的目的在于提供一种用于计算机人工智能设备的隐藏式保护机构,旨在解决以下问题:现有的用于计算机人工智能设备的保护机构普遍较为传统,隐蔽性差,影响计算机人工智能设备的美观,且防护效果差,难以实现对计算机人工智能设备的充分保护,因此难以得到广泛应用。
5.本发明实施例是这样实现的,一种用于计算机人工智能设备的隐藏式保护机构,该隐藏式保护机构设置于计算机人工智能设备主体上,所述用于计算机人工智能设备的隐藏式保护机构包括:导轨,所述导轨设置于所述计算机人工智能设备主体上;防护组件,所述防护组件设置于所述导轨上;其中所述防护组件包括第一防护块、移动板、第二防护块、第三防护块、防护网以及牵引组件,所述第一防护块安装固定在所述导轨上,所述第二防护块与所述导轨之间滑动配合,所述第三防护块滑动安装在所述导轨上,所述第三防护块与所述第二防护块之间以及所述第一防护块与所述第二防护块之间均通过防护网连接,所述移动板滑动安装在所述导轨上,且移动板一端通过防护网与第三防护块连接,移动板另一端通过牵引组件与所述第一防护块连接,牵引组件的拉拽作用实现移动板在导轨上滑动,防护网的连接作用实现移动板依次拉动第三防护块和第二防护块在导轨上滑动,第二防护块、第三防护块以及第一防护块相互分散运动的方式使得防护网受到拉力并紧绷,分散的第二防护块、第三防护块以及第一防护块的支撑作用配合紧绷防护网实现对计算机人工智能设备主体的保护。
6.与现有技术相比,本发明实施例的有益效果:本发明实施例设置有防护组件,通过防护组件内设置的牵引组件的拉拽作用实现移动板在导轨上滑动,防护网的连接作用实现移动板依次拉动第三防护块和第二防护块在导轨上滑动,第二防护块、第三防护块以及第
一防护块相互分散运动的方式使得防护网受到拉力并紧绷,分散的第二防护块、第三防护块以及第一防护块的支撑作用配合紧绷防护网实现对计算机人工智能设备主体的充分保护,避免了现有保护机构防护效果差,难以实现对计算机人工智能设备充分保护的问题,第一防护块、第二防护块以及第三防护块分散时组合在一起占用空间较小,能够起到隐蔽的效果,同时能够提高计算机人工智能设备主体整体的美观性,避免了现有保护机构隐蔽性差,影响计算机人工智能设备美观的问题。
附图说明
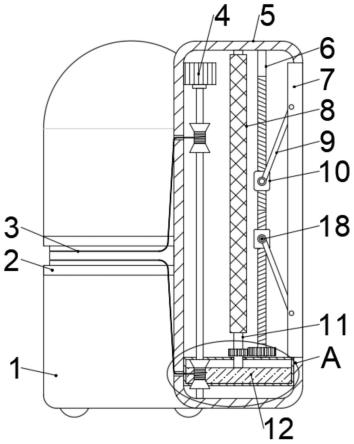
7.图1为本发明实施例提供的一种用于计算机人工智能设备的隐藏式保护机构的主视剖视结构示意图。
8.图2为本发明实施例提供的一种用于计算机人工智能设备的隐藏式保护机构的俯视结构示意图。
9.图3为图1中a处的放大结构示意图。
10.图4为图2中b处的放大结构示意图。
11.图5为本发明实施例提供的一种用于计算机人工智能设备的隐藏式保护机构中防护组件工作时的俯视结构示意图。
12.附图中:1-计算机人工智能设备主体,2-导轨,3-牵引绳,4-驱动电机,5-第一防护块,6-螺纹杆,7-缓冲板,8-防护网,9-支撑杆,10-滑块,11-收卷辊,12-收卷件,13-安装盒,14-牵引辊,15-传动齿轮,16-转轴,17-移动板,18-第二防护块,19-第三防护块。
具体实施方式
13.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
14.以下结合具体实施例对本发明的具体实现进行详细描述。
15.请参阅图1-图5,本发明实施例提供的一种用于计算机人工智能设备的隐藏式保护机构,该隐藏式保护机构设置于计算机人工智能设备主体1上,所述用于计算机人工智能设备的隐藏式保护机构包括:导轨2,所述导轨2设置于所述计算机人工智能设备主体1上;防护组件,所述防护组件设置于所述导轨2上;其中所述防护组件包括第一防护块5、移动板17、第二防护块18、第三防护块19、防护网8以及牵引组件,所述第一防护块5安装固定在所述导轨2上,所述第二防护块18与所述导轨2之间滑动配合,所述第三防护块19滑动安装在所述导轨2上,所述第三防护块19与所述第二防护块18之间以及所述第一防护块5与所述第二防护块18之间均通过防护网8连接,所述移动板17滑动安装在所述导轨2上,且移动板17一端通过防护网8与第三防护块19连接,移动板17另一端通过牵引组件与所述第一防护块5连接,牵引组件的拉拽作用实现移动板17在导轨2上滑动,防护网8的连接作用实现移动板17依次拉动第三防护块19和第二防护块18在导轨2上滑动,第二防护块18、第三防护块19以及第一防护块5相互分散运动的方式使得防护网8受到拉力并紧绷,分散的第二防护块18、第三防护块19以及第一防护块5的支撑作用配合紧绷防护网8实现对计算机人工智
能设备主体1的保护。
16.在本发明的实施例中,该防护机构优先适用于外观为圆柱形的计算机人工智能设备,通过牵引组件工作的方式即可带动移动板17在导轨2上滑动,通过防护网8的连接作用即可实现移动板17依次拉动第三防护块19和第二防护块18在导轨2上滑动,当移动板17移动至与第一防护块5紧贴的位置时,第二防护块18、第三防护块19以及第一防护块5充分散开,从而使得防护网8受到拉力并紧绷,通过分散第二防护块18、第三防护块19以及第一防护块5的独立支撑作用配合紧绷防护网8实现对计算机人工智能设备主体1的充分保护;其中所述防护组件内还可以设置有用于检测计算机人工智能设备主体1摔倒情况的传感器,所述传感器可以采用视觉传感器和加速度传感器,也可以采用其他传感器,且所述传感器的型号以及电性连接方式不作具体限定;相比现有技术,本发明实施例设置有防护组件,通过防护组件内设置的牵引组件的拉拽作用实现移动板17在导轨2上滑动,防护网8的连接作用实现移动板17依次拉动第三防护块19和第二防护块18在导轨2上滑动,第二防护块18、第三防护块19以及第一防护块5相互分散运动的方式使得防护网8受到拉力并紧绷,分散的第二防护块18、第三防护块19以及第一防护块5的支撑作用配合紧绷防护网8实现对计算机人工智能设备主体1的充分保护,避免了现有保护机构防护效果差,难以实现对计算机人工智能设备充分保护的问题,第一防护块5、第二防护块18以及第三防护块19分散时组合在一起占用空间较小,能够起到隐蔽的效果,同时能够提高计算机人工智能设备主体1整体的美观性,避免了现有保护机构隐蔽性差,影响计算机人工智能设备美观的问题。
17.在本发明的一个实施例中,请参阅图1-图3,所述牵引组件包括:转轴16,所述转轴16转动安装在所述第一防护块5内,且第一防护块5内还设置有用于带动转轴16转动的驱动电机;至少一组牵引辊14,所述牵引辊14安装固定在所述转轴16上;以及牵引绳3,所述牵引绳3一端绕制在所述牵引辊14上,牵引绳3另一端与所述移动板17固定连接,且所述牵引绳3的中部贴合所述导轨2安装。
18.在本实施例中,所述导轨2上可以设置有用于固定牵引绳3的开槽,通过将牵引绳3按压在开槽内的方式便于提高牵引绳3的隐蔽性,减小牵引绳3对计算机人工智能设备主体1外观的影响,通过驱动电机4工作的方式即可带动转轴16转动,通过转轴16带动牵引辊14旋转的方式即可实现牵引绳3对移动板17的牵引作用;其中所述驱动电机4采用伺服电机即可。
19.在本发明的一个实施例中,请参阅图1、图3和图4,所述第一防护块5内还设置有收卷组件,所述收卷组件包括:收卷辊11,所述收卷辊11通过安装盒13转动安装在所述第一防护块5内,且收卷辊11与防护网8一端相连接;以及收卷件12,所述收卷件12位于所述安装盒13内,且收卷件12与所述收卷辊11相连接。
20.在本实施例中,所述收卷件12可以采用螺旋弹簧,当需要将第一防护块5、第二防护块18以及第三防护块19集中到一起时,通过牵引组件释放移动板17的方式,配合收卷件12带动收卷辊11转动的方式即可实现对防护网8的收缩处理。
21.在本发明的一个实施例中,所述收卷组件还设置于所述第二防护块18和所述第三
防护块19内。
22.在本发明的一个实施例中,请参阅图1和图2,所述第二防护块18在所述导轨2设置有多组。
23.在本实施例中,通过多组第二防护块18的设置能够提高支撑效果,从而避免计算机人工智能设备主体1出现损伤。
24.在本发明的一个实施例中,请参阅图1、图3和图5,还包括设置于所述第一防护块5内的缓冲组件,所述缓冲组件包括:缓冲板7,所述缓冲板7与所述第一防护块5之间滑动配合;螺纹杆6,所述螺纹杆6转动安装在所述第一防护块5内,且螺纹杆6与收卷辊11之间通过传动齿轮15连接;至少一组滑块10,所述滑块10与所述螺纹杆6之间螺纹连接;以及支撑杆9,所述支撑杆9与所述滑块10和所述缓冲板7之间均通过第二防护块18连接。
25.在本实施例中,所述滑块10在所述螺纹杆6上对称设置有两组,所述螺纹杆6上的螺纹采用对称且旋向相反的结构设置,便于实现两组滑块10同时向内或者向外运动;当第一防护块5、第二防护块18以及第三防护块19相互分散时,通过防护网8即可拉动收卷辊11转动,通过收卷辊11与传动齿轮15之间的配合作用即可实现螺纹杆6转动,通过螺纹杆6带动两组滑块10同时向外运动的方式,通过支撑杆9即可推动缓冲板7向外运动,从而实现缓冲作用,减小冲击对计算机人工智能设备主体1产生的影响,当第一防护块5、第二防护块18以及第三防护块19聚集运动时,通过收卷辊11以相反方向转动的方式即可带动螺纹杆6转动(此处的反方向运动是针对第一防护块5、第二防护块18以及第三防护块19相互分散时收卷辊11的转动方向而言),使得两组滑块10同时向内运动,从而使得缓冲板7重新影藏到内部。
26.在本发明的一个实施例中,请参阅图1,所述缓冲组件还设置于所述第二防护块18和所述第三防护块19内。
27.在本实施例中,通过多组缓冲组件的设置,能够降低摔倒时产生的冲击力对计算机人工智能设备主体1的影响,从而提高保护效果,降低损伤。
28.在本发明的一个实施例中,所述缓冲板7上还设置有橡胶垫。
29.在本实施例中,橡胶垫设置于缓冲板7的表面,通过橡胶垫能够提高缓冲板7的缓冲效果,从而提高机构的保护能力,进而实现对计算机人工智能设备主体1的充分保护。
30.综上所述,本发明的工作原理是:通过牵引组件工作的方式即可带动移动板17在导轨2上滑动,通过防护网8的连接作用即可实现移动板17依次拉动第三防护块19和第二防护块18在导轨2上滑动,当移动板17移动至与第一防护块5紧贴的位置时,第二防护块18、第三防护块19以及第一防护块5充分散开,从而使得防护网8受到拉力并紧绷,通过分散第二防护块18、第三防护块19以及第一防护块5的独立支撑作用配合紧绷防护网8实现对计算机人工智能设备主体1的充分保护;当第一防护块5、第二防护块18以及第三防护块19相互分散时,通过防护网8即可拉动收卷辊11转动,通过收卷辊11与传动齿轮15之间的配合作用即可实现螺纹杆6转动,通过螺纹杆6带动两组滑块10同时向外运动的方式,通过支撑杆9即可推动缓冲板7向外运动,从而实现缓冲作用,减小冲击对计算机人工智能设备主体1产生的
影响,当第一防护块5、第二防护块18以及第三防护块19聚集运动时,通过收卷辊11以相反方向转动的方式即可带动螺纹杆6转动,使得两组滑块10同时向内运动,从而使得缓冲板7重新影藏到内部;当需要将第一防护块5、第二防护块18以及第三防护块19集中到一起时,通过牵引组件释放移动板17的方式,配合收卷件12带动收卷辊11转动的方式即可实现对防护网8的收缩处理。
31.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
