适用于狭小空间的深井救援机器人的智能救援方法
1.本技术是申请号为:201710194767.6,申请日:2017-03-28,专利名称“一种适用于狭小空间的深井救援机器人及救援方法”的发明专利的分案申请。
技术领域
2.本发明涉及深井救援技术领域,特别涉及适用于狭小空间的深井救援机器人的智能救援方法。
背景技术:
3.在我们的生活环境中存在着大量各种不同用途的孔、洞,如废弃机井、矿井、探井、管道、建筑基桩孔、排污深井等。由于各种原因使人或物意外落入其中的事件时有发生,而目前的救援方式仍需要用绳索吊起施救人员,施救人员深入井下寻找待救人员,由于这一类井、孔大多直径较小空气流通较差甚至含有毒气体使得施救人员的救援危险和难度都很大,甚至会导致施救人员昏迷,而有的孔洞过于狭小,施救人员难以进入。
4.为了克服现有救援方式的不足,已有相应的发明,例如cn201010032458.7中所述的一种小直径深井救援器,该方案包括1个定管,1个动管,1个护板开合调节管,1个托板,2个护板,3个直流电机其中一个为动管升降电机、一个为托板摆动电机、一个为护板开合电机,3个观察摄像头,3个照明灯,1套语音通话器,1根通气软管,1个12v直流便携式气泵(或氧气瓶),1个12v便携式直流电源,1台小型笔记本电脑及相应的电器控制开关和连接电缆线等;该装置可以实现施救人员在地面上通过小直径深井救援器对井下被困对象实施救援,避免了让施救人员直接进入深井,且救援器的尺寸可以适应较狭窄孔洞。但是该发明存在以下问题:
5.1.该救援器下降过程是由现场人员操作,而很多孔、洞并不是垂直设置,而是存在斜度或弧度,且井内无光照,能见度很低,这种情况下为了避免磕碰,救援器下降的速度往往很慢,特别是井内存在井水,机器人需要先悬空下降一段距离再进入水中下潜时,下降及下潜的速度难以掌握,往往导致救援不及时;而当救援器抓住待救人员向上运动时,一般是在井口拉拽绳索将救援器拉起,同样需要注意救援器上方的地理环境,导致救援器上升速度缓慢,而深井救援的一个非常重要的问题就是施救时间短,施救速度决定了施救效果,因此该救援器实际使用过程中的施救效果不甚理想。
6.2.有的废井较深,为了防止救援绳不够的情况,往往需要准备很长的备用救援绳,导致机器人的体积大且难以携带。
7.3.若在深井中遇到沿深井截面横向突出的障碍物,该救援器无法躲避绕行,适用范围有限。
技术实现要素:
8.针对上述问题,本发明目的是提供一种通过能力强、救援及时、便于携带的适用于狭小空间的深井救援机器人的智能救援方法。
9.为实现上述发明目的,本发明所采用的技术方案是:一种适用于狭小空间的深井救援机器人,所述的机器人包括水平设置的椭圆球壳形探路体、多个球壳形救援体,沿竖直方向、探路体与救援体之间、相邻救援体之间通过救援绳相互连接成可拆卸式的串联结构,救援体位于探路体上方,救援绳与探路体、救援体分别连接的端头处设置自动连接/分离机构,自动连接/分离机构包括分别设置在探路体外表面上端凹槽内、救援体外表面上端凹槽内,可沿竖直方向伸缩的第一电动活塞杆,第一电动活塞杆的端头设置挂环;所述的救援体外表面下端与救援绳的一端连接,救援绳的另一端与电动挂钩连接,挂环与电动挂钩的尺寸相适应。
10.所述救援体的球半径尺寸小于或等于探路体的水平面截面上其椭圆短轴尺寸;所述的探路体、救援体各自的上端面相应位置设置四旋翼或六旋翼式飞行机构,飞行机构包括六角星形状的支架,支架上相应位置分别安装飞行旋翼、蓄电池、速度传感器、陀螺仪、旋翼驱动电机;
11.所述探路体的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿,支腿收缩进探路体外侧面上相应位置设置的凹槽内后,不突出探路体的外表面;位于探路体外侧面下方的一排支腿向探路体的下方外侧倾斜设置,位于探路体外侧面上方的一排支腿向探路体的上方外侧倾斜设置;所述支腿的外端设置驱动轮,驱动轮内设置轮毂电机及用于制动驱动轮的制动器,驱动轮表面与井壁接触;所述探路体沿水平面截面中其椭圆形长轴附近的支腿完全伸展后的长度小于其椭圆形短轴附近设置的支腿完全伸展后的长度;
12.所述探路体的底部壳体由透明材料制作而成,其底部壳体内侧分别设置无线路由器、水压压力传感器、探路器、第一处理器,红外热成像仪、海拔高度计、摄像头,探路体底部壳体外侧设置用于固定待救人员的救援机构;
13.所述的救援体内设置无线路由器、第二处理器;所述的第一处理器、第二处理器通过各自的无线路由器通信,所述的第一处理器、第二处理器还可以通过各自的无线路由器与远程监控台上设置的第三处理器进行无线通信。
14.优选的,所述的救援机构包括探路体底部设置的双臂机械手,双臂机械手上相应位置设置颈部固定机械手。
15.优选的,所述的支腿为多个支杆两两首尾相互铰接形成的w式波浪状结构,支腿上设置可使多个支杆收缩成w式波浪结构或展开成一个接近长直杆结构的支腿驱动装置,所述支杆为电动式或电动液压式可伸缩杆,所述的驱动轮与支腿连接处设置压力传感器。
16.优选的,所述的探路体底部壳体外侧还设置有毒气体检测器;所述的救援体的底部壳体外侧设置氧气瓶、有毒气体中和罐。
17.根据上述权任意一种适用于狭小空间的深井救援机器人的救援方法,其特征在于:所述的救援方法依次包括探路定位、现场施救、快速上升;
18.所述的探路定位步骤包括释放探路体、绘制地图、释放救援体、定位;
19.所述的释放探路体步骤为:将探路体放在井口正上方,远程监控台的第三处理器向第一处理器发送启动信号,第一处理器启动飞行机构,使探路体以速度v0下降,下降过程中探路器、摄像头实时采集探路体下方一定距离处的多个深井截面图,所述的深井截面图为与探路体运动方向呈90
°
的井壁截面轮廓形状,第一处理器对比探路器、摄像头各自采集
的深井截面图,将两个深井截面图中井壁截面轮廓更大的一个记为第一类深井截面图,另一个记为第二类深井截面图,即井壁截面轮廓周长更大的一个为第一类深井截面图,另一个为第二类深井截面图;
20.所述的绘制地图步骤为:探路体下降的过程中,探路器、摄像头按照一定频率向第一处理器发送探路体下方一定距离处的多个第一类深井截面图、第二类深井截面图,海拔高度计按照时间顺序、将深度h分别标记在第一类深井截面图、第二类深井截面图中,第一处理器提取出第一类深井截面图、第二类深井截面图的轮廓尺寸,以探路体的椭圆球心的运动轨迹为扫描线,分别以第一类深井截面图、第二类深井截面图的轮廓尺寸为截面,以多截面扫略方式绘制出两个三维模型,与第一类深井截面图对应的三维模型记为第一类深井地图,与第二类深井截面图相对应的三维模型记为第二类深井地图;第一处理器实时通过无线路由器向其上方的多个救援体、远程监控台发送第一类深井地图、第二类深井地图;
21.所述的释放救援体步骤为:探路体下降一定深度后,启动救援体上的飞行机构,向井内间隔投放多个救援体,第二处理器根据探路体的下降速度v0以及第二类深井地图实时调整探路体的下降速度v2,使救援体与探路体之间的距离、相邻救援体之间的距离始终保持在一定范围之内;所述的救援体下降过程中,通过其上设置的无线路由器实时向其上方的多个救援体、远程监控台发送第一类深井地图、第二类深井地图;
22.所述的定位步骤为:当探路体上设置的红外热成像仪探测到下方一定距离处有待救人员时,探路体上的飞行机构减速下降并悬停在空中,探路体减速的同时伸开多个支腿,使支腿与井壁轮廓内侧面接触,当探路体相对的两个侧面上各自至少有两个支腿的压力传感器检测到的压力值大于一定值,且速度传感器发送的探路体的下降速度为0,飞行机构停止运动;压力传感器检测的压力值达到预定值的驱动轮动作,使探路体继续下降到待救人员上方一定距离处后停止运动,然后通过无线路由器发出定位信号;
23.探路体上方的多个救援体收到定位信号后以最大速度v3向下运动至探路体附近并与探路体自动连接成串联结构;所述的v3为救援体根据探路体传递的第二类深井地图计算出的最大下降速度,多个救援体下降过程中第二处理器实时调整v3,使相邻救援体之间的安全距离始终保持在一定范围之内;
24.所述的现场施救步骤为:当探路体下降至待救人员上方一定距离处停止运动后,第一处理器分析红外热成像仪传递的待救人员轮廓参数,识别出待救人员的躯干位置、胳膊位置、头部位置,探路体根据待救人员的躯干位置、胳膊位置控制多轴式双臂机械手呈向下的c形,并环抱在待救人员腋下部位;
25.所述的救援体到达待救人员上方并与探路体构成串联式结构后,打开其上设置的氧气瓶、有毒气体中和罐,使待救人员附近充满氧气;接着探路体、救援体各自的飞行机构启动,带动待救人员缓慢向上运动一定距离,当待救人员双脚离地后,双臂机械手上设置的颈部固定机械手将待救人员的颈部靠紧;然后红外热成像仪采集待救人员站立状态的外轮廓参数并传递给第一处理器;
26.所述的快速上升步骤为:探路体的飞行机构启动,使探路体、救援体共同带动待救人员一起向上飞行,向上飞行过程中救援体对探路体施加一定的拉力,使相邻救援体之间设置的救援绳、探路体与救援体之间设置的救援绳具有一定的拉紧力;所述的探路体、救援体向上飞行时各自的运动轨迹与探路体、救援体下降时各自的运动轨迹相同。
27.优选的,所述的探路定位步骤中,水压压力传感器监测的压力值突然增大且持续一定时间,同时速度传感器监测到探路体下降的速度突然减小,则第一处理器判断此时井中有水存在,将水压压力传感器监测的压力值突然增大时刻的高度h标记为水位线,将水位线分别标记在第一类深井地图、第二类深井地图中,同时关闭探路体的飞行机构;
28.第一处理器分析探路体下方的多个第一类深井截面图计算出多个支腿的伸展距离d及伸展时间t,同时实时控制支腿驱动装置使支腿伸展,当压力传感器检测到驱动轮与井壁接触并达到一定压力后,支腿停止伸展;当第一处理器检测到探路体相对的两个侧面上各自至少有两个支腿的压力传感器发送的压力值达到预期,则控制压力值达到预期的驱动轮上的轮毂电机运动,使探路体以速度v1下降。
29.优选的,所述的探路定位步骤中,第一处理器实时分析探路体下方的多个第二类深井截面图,当第一处理器判断探路体可以保持水平姿势通过多个第二类深井截面图轮廓,则控制探路体继续以速度v0下降,当第一处理器判断探路体无法保持水平姿态通过其下方的多个第二类深井截面图轮廓,则将探路体与多个第二类深井截面图轮廓干涉的区域标示为障碍物,探路体在障碍物上方一定距离处悬停,并伸开多个支腿,使支腿与井壁轮廓内侧面接触,当探路体相对的两个侧面上各自至少有两个支腿的压力传感器检测到的压力值大于一定值,且速度传感器发送的探路体的下降速度为0,则飞行机构停止运动;第一处理器计算探路体依次通过其下方多个障碍物时需要沿竖直平面倾斜的角度,并根据与障碍物同高度且相对应的第一类深井截面图计算出探路体下降过程中,其上多个支腿伸展并与井壁内侧接触的伸展距离d及伸展时间t;
30.然后第一处理器控制多个支腿伸长,使探路体沿竖直平面倾斜一定角度并以速度v1通过障碍物;所述的v1的计算方法为:第一处理器根据与探路体最接近的一个第一类深井截面图计算出多个支腿的伸展距离d及伸展时间t,根据多个伸展时间t中的最大值计算出探路体向下运动至该深第一类井截面图处的最大速度,该最大速度即为v1;当探路体下方没有继续出现障碍物,则探路体恢复水平姿势,并启动飞行机构,收起支腿,使探路体重新以速度v0继续下降;
31.所述的快速上升步骤中,探路体绕过其上方障碍物的方法与探路体下降时绕过其下方同样的障碍物的方法一致。
32.优选的,所述的快速上升步骤中,当探路体、救援体位于水位线以下时,探路体的多个支腿伸展,使探路体、救援体依靠驱动轮上的轮毂电机提供的驱动力上升;当探路体、救援体位于水位线以上时,探路体、救援体各自的飞行机构启动,同时收回支腿,探路体、救援体依靠飞行机构提供的驱动力上升。
33.优选的,所述的探路定位步骤中,有毒气体检测器实时检测深井中的有毒气体成分及含量,第一处理器将有毒气体成分及含量标记在第二类深井地图中,同时将该信息分别传递给救援体、远程监控台;所述的探路定位步骤中,救援体下降至第二类深井地图中标示的有毒气体含量较高的区域时,打开其上设置的有毒气体中和罐进行有毒气体中和;当第一处理器判断深井中存在有毒气体中和罐无法处理的有毒气体,则向远程监控台发送报警信号。
34.本发明的有益效果在于:救援机器人可以依靠飞行机构和支腿在井下实现飞行运动或爬行运动,体积紧凑,且可以满足水下救援,探路体下降时遇到障碍物可以进行躲避,
通过能力强,适合狭小空间救援。探路体下降时绘制第一类深井地图、第二类深井地图有利于提高救援体、探路体的下降速度以及上升速度。
附图说明
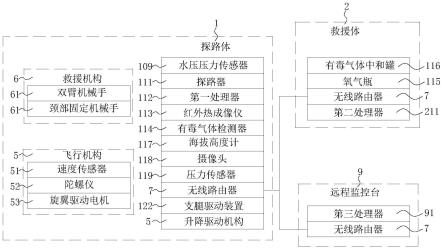
35.图1为机器人电路系统原理图;
36.图2为探路体外侧的支腿与井壁接触正视图;
37.图3为图2中a-a剖视图;
38.图4为探路定位步骤中释放探路体、救援体示意图;
39.图5为探路定位步骤中探路体绕过障碍物示意图;
40.图6为自动连接/分离机构示意图;
41.图7为快速上升步骤中救援机构动作示意图;
42.图8为机器人进行救援的救援方法流程图。
具体实施方式
43.如图1-图6所示的一种适用于狭小空间的深井救援机器人,包括水平设置的椭圆球壳形探路体1、多个球壳形救援体2,沿竖直方向、探路体1与救援体2之间、相邻救援体2之间通过救援绳3相互连接成可拆卸式的串联结构,救援体2位于探路体1上方,救援绳3与探路体1、救援绳3与救援体2连接的端头处设置自动连接/分离机构,自动连接/分离机构包括分别设置在探路体1外表面上端凹槽内、救援体2外表面上端凹槽内,可沿竖直方向伸缩的第一电动活塞杆101,第一电动活塞杆101的端头设置挂环102;所述的救援体2外表面下端与救援绳3的一端连接,救援绳3的另一端与电动挂钩104连接,挂环102与电动挂钩104的尺寸相适应。
44.探路体1的外形为椭圆球形,可以有效减小其横截面尺寸,且保证其有足够的容纳空间;遇到障碍物时,探路体1可以旋转一定角度绕过障碍物,提高其通过性能;为了保证探路体1顺利下降,其水平面内的椭圆球截面轮廓小于我国第5百分位成年女子肩膀处横截面轮廓,为了保证救援体2顺利下降,救援体2的球半径尺寸小于或等于探路体1沿水平面其椭圆截面轮廓的短轴尺寸;
45.所述的探路体1、救援体2各自的上端面相应位置设置四旋翼或六旋翼式飞行机构5,飞行机构5包括水平设置在探路体1、救援体2上部的六角星形状的支架,支架上相应位置分别安装飞行旋翼、蓄电池、速度传感器51、陀螺仪52、旋翼驱动电机53;
46.所述探路体1的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿12,支腿12收缩进探路体1外侧面上相应位置设置的凹槽内后,不突出探路体1的外表面;位于探路体1外侧面下方的一排支腿12向探路体1的下方外侧倾斜设置,位于探路体1外侧面上方的一排支腿12向探路体1的上方外侧倾斜设置;所述支腿12的外端设置驱动轮,驱动轮内设置轮毂电机及用于制动驱动轮的制动器,驱动轮表面与井壁接触;
47.由于深井的截面类似于圆形,而为了提高探路体1的通过能力,其形状为椭圆球壳形,因此更好的实施方式是:沿水平截面,所述探路体1椭圆形长轴附近的支腿12完全伸展后的长度小于其椭圆形短轴附近设置的支腿12完全伸展后的长度,这样可以有效减小探路
体1的重量。
48.所述探路体1的底部壳体由透明材料制作而成,可以是透明树脂复合材料,也可以是透明pvc塑料材料,也可以是其他具有一定强度的透明复合材料,探路体1底部壳体内侧分别设置无线路由器7、水压压力传感器109、探路器111、第一处理器112,红外热成像仪113、海拔高度计117、摄像头118,探路体1底部壳体外侧设置用于固定待救人员的救援机构6;救援机构6可以伸缩进探路体1的壳体内,这样可以使探路体1具有防水功能;所述的探路器111可以是超声波式探路器,也可以是激光式探路器,也可以是其他方式的探路器。
49.所述的救援体2内设置无线路由器7、第二处理器211;所述的第一处理器112、第二处理器211通过各自的无线路由器7通信,所述的第一处理器112、第二处理器211还可以通过各自的无线路由器7与远程监控台9上设置的第三处理器91进行无线通信,远程监控台9内设置无线路由器7。
50.所述的救援机构6包括探路体1底部壳体外侧设置的双臂机械手61,双臂机械手61上相应位置设置颈部固定机械手62。
51.所述的支腿12为多个支杆121两两首尾相互铰接形成的w式波浪状结构,支腿12上设置可使多个支杆121收缩成w式波浪结构或展开成一个接近长直杆结构的支腿驱动装置122,支腿驱动装置122可以是一个液压泵,支杆121作为一个液压活塞杆,在支杆121内设置液压管道,支杆121相互铰接处设置一个液压旋转阀件,液压泵工作时即可实现多个支腿12的收缩或伸展;支腿驱动装置122也可以是多个支杆121相互铰接的铰接点处设置驱动电机,使支腿12成为电动式多轴机械手,铰接点处设置的驱动电机动作实现多个支腿12的收缩或伸展。所述支杆121为电动式或电动液压式可伸缩杆,当支腿12由w式的波浪形状展开成长直杆形状后,支杆121本身的长度变化,可以进一步延长多个支腿12展开后的长度。所述的驱动轮与支腿12连接处设置压力传感器119。
52.更好的实施方式是:所述的探路体1底部壳体外侧还设置有毒气体检测器114;所述的救援体2的底部壳体外侧设置氧气瓶115、有毒气体中和罐116。
53.如图7-图8所示的,根据上述的任意一种适用于狭小空间的深井救援机器人的智能救援方法,所述的救援方法依次包括探路定位、现场施救、快速上升;
54.所述的探路定位步骤包括释放探路体、绘制地图、释放救援体、定位;
55.所述的释放探路体步骤为:将探路体1放在井口正上方,远程监控台9的第三处理器91向第一处理器112发送启动信号,第一处理器112启动飞行机构5,使探路体1以速度v0飞行下降,下降过程中探路器111、摄像头118实时采集探路体1下方一定距离处的多个深井截面图,所述的深井截面图为与探路体1运动方向呈90
°
的井壁截面轮廓形状,第一处理器112对比探路器111、摄像头118各自采集的深井截面图,将两个深井截面图中井壁截面轮廓更大的一个记为第一类深井截面图,另一个记为第二类深井截面图,即井壁截面轮廓周长更大的一个为第一类深井截面图,另一个为第二类深井截面图;
56.所述的绘制地图步骤为:探路体1下降的过程中,探路器111、摄像头118按照一定频率向第一处理器112发送探路体1下方一定距离处的多个第一类深井截面图、第二类深井截面图,海拔高度计117按照时间顺序、将深度h分别标记在第一类深井截面图、第二类深井截面图中,第一处理器112提取出第一类深井截面图、第二类深井截面图的轮廓尺寸,以探路体1的椭圆球心的运动轨迹为扫描线,分别以第一类深井截面图、第二类深井截面图的轮
廓尺寸为截面,以多截面扫略方式绘制出两个三维模型,与第一类深井截面图对应的三维模型记为第一类深井地图,与第二类深井截面图相对应的三维模型记为第二类深井地图;第一处理器112实时通过无线路由器7向其上方的多个救援体2、远程监控台9发送v0、第一类深井地图、第二类深井地图;
57.所述的释放救援体步骤为:探路体1下降一定深度后,启动救援体2上的飞行机构5,向井内间隔投放多个救援体2,第二处理器211根据探路体1的下降速度v0以及第二类深井地图实时调整探路体2的下降速度v2,使救援体2与探路体1之间的距离、相邻救援体2之间的距离始终保持在一定范围之内;所述的救援体2下降过程中,通过其上设置的无线路由器7实时向其上方的多个救援体2、远程监控台9发送v0、v2、第一类深井地图、第二类深井地图;
58.所述的定位步骤为:当探路体1上设置的红外热成像仪113探测到下方一定距离处有待救人员时,探路体1上的飞行机构5减速下降并悬停在空中,探路体1减速的同时伸开多个支腿12,使支腿12与井壁轮廓内侧面接触,当探路体1相对的两个侧面上各自至少有两个支腿12的压力传感器119检测到的压力值大于一定值,且速度传感器51发送的探路体1的下降速度为0时,飞行机构5停止运动;压力传感器119检测的压力值达到预定值的驱动轮动作,使探路体1继续下降到待救人员上方一定距离处后停止运动,然后通过无线路由器7发出定位信号;
59.探路体1上方的多个救援体2收到定位信号后以最大速度v3向下运动至探路体1附近并与探路体1自动连接成串联结构后悬停在空中;所述的v3为救援体2根据探路体1传递的第二类深井地图计算出的最大下降速度,多个救援体2下降过程中第二处理器211实时调整v3,使相邻救援体2之间的安全距离始终保持在一定范围之内;
60.所述的现场施救步骤为:当探路体1下降至待救人员上方一定距离处停止运动后,第一处理器112分析红外热成像仪113传递的待救人员轮廓参数,识别出待救人员的躯干位置、胳膊位置、头部位置,探路体1根据待救人员的躯干位置、胳膊位置控制多轴式双臂机械手61呈向下的c形,并环抱在待救人员腋下部位;
61.所述的救援体2到达待救人员上方并与探路体1构成串联式结构后,打开其上设置的氧气瓶115、有毒气体中和罐116,使待救人员附近充满氧气;接着探路体1、救援体2各自的飞行机构5启动,带动待救人员缓慢向上运动一定距离,当待救人员双脚离地后,双臂机械手61上设置的颈部固定机械手62根据待救人员头部位置参数将待救人员的颈部靠紧;然后红外热成像仪113采集待救人员站立状态的外轮廓参数并传递给第一处理器112;
62.所述的快速上升步骤为:探路体1的飞行机构5启动,使探路体1、救援体2共同带动待救人员一起向上飞行,向上飞行过程中救援体2对探路体1施加一定的拉力,使相邻救援体2之间设置的救援绳3、探路体1与救援体2之间设置的救援绳3具有一定的拉紧力;所述的探路体1、救援体2向上飞行时各自的飞行轨迹与探路体1、救援体2下降时各自的运动轨迹相同。
63.更好的实施方式是:所述的探路定位步骤中,第一处理器112实时分析探路体1下方的多个第二类深井截面图,当第一处理器112判断探路体1可以保持水平姿势通过多个第二类深井截面图轮廓,则控制探路体1继续以速度v0下降,当第一处理器112判断探路体1无法保持水平姿态通过其下方的多个第二类深井截面图轮廓,则将探路体1与多个第二类深
井截面图轮廓干涉的区域标示为障碍物,探路体1在障碍物上方一定距离处悬停,并伸开多个支腿12,使支腿12与井壁轮廓内侧面接触,当探路体1相对的两个侧面上各自至少有两个支腿12的压力传感器119检测到的压力值大于一定值,且速度传感器51发送的探路体1的下降速度为0,则飞行机构5停止运动;第一处理器112计算探路体1依次通过其下方多个障碍物时需要沿竖直平面倾斜的角度,并根据与障碍物同高度且相对应的第一类深井截面图计算出探路体1下降过程中,其上多个支腿12伸展并与井壁内侧接触的伸展距离d及伸展时间t;
64.然后第一处理器112控制多个支腿12伸长,使探路体1沿竖直平面倾斜一定角度并以速度v1爬行通过障碍物;所述的v1的计算方法为:第一处理器112根据与探路体1最接近的一个第一类深井截面图计算出多个支腿12的伸展距离d及伸展时间t,根据多个伸展时间t中的最大值计算出探路体1向下运动至该深第一类井截面图处的最大速度,该最大速度即为v1;当探路体1下方没有继续出现障碍物,则探路体1恢复水平姿势,并启动飞行机构5,收起支腿12,使探路体1重新以速度v0继续飞行下降;
65.所述的快速上升步骤中,探路体1绕过其上方障碍物的方法与探路体1下降时绕过其下方同样的障碍物的方法一致。
66.更好的实施方式是:所述的探路定位步骤中,水压压力传感器109监测的压力值突然增大且持续一定时间,同时速度传感器51监测到探路体1下降的速度突然减小,则第一处理器112判断此时井中有水存在,将水压压力传感器109监测的压力值突然增大时刻的高度h标记为水位线,将水位线分别标记在第一类深井地图、第二类深井地图中,同时关闭探路体1的飞行机构5;
67.第一处理器112分析探路体1下方的多个第一类深井截面图计算出多个支腿12的伸展距离d及伸展时间t,同时实时控制支腿驱动装置122使支腿12伸展,当压力传感器119检测到驱动轮与井壁接触并达到一定压力后,支腿12停止伸展;当第一处理器112检测到探路体1相对的两个侧面上各自至少有两个支腿12的压力传感器119发送的压力值达到预期,则控制压力值达到预期的驱动轮上的轮毂电机运动,使探路体1以速度v1爬行下降。
68.所述的快速上升步骤中,当探路体1、救援体2位于水位线以下时,探路体1的多个支腿12伸展,使探路体1、救援体2依靠驱动轮上的轮毂电机提供的驱动力爬行上升;当探路体1、救援体2位于水位线以上时,探路体1、救援体2各自的飞行机构5启动,同时收回支腿12,探路体1、救援体2依靠飞行机构5提供的驱动力飞行上升。
69.更好的实施方式是:所述的探路定位步骤中,有毒气体检测器114实时检测深井中的有毒气体成分及含量,第一处理器112将有毒气体成分及含量标记在第二类深井地图中,同时将该信息分别传递给救援体2、远程监控台9;所述的探路定位步骤中,救援体2下降至第二类深井地图中标示的有毒气体含量较高的区域时,打开其上设置的有毒气体中和罐进行有毒气体中和;当第一处理器112判断深井中存在有毒气体中和罐116无法处理的有毒气体,则向远程监控台9发送报警信号。此时位于井口附近的救援人员可以将一个携带有相应中和气体的救援体2再次投放入井内,再次投放的救援体2可以在相应位置对未中和的有毒气体进行再次中和,以保证待救人员在上升的过程中不会因有毒气体受到二次伤害。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。