技术特征:
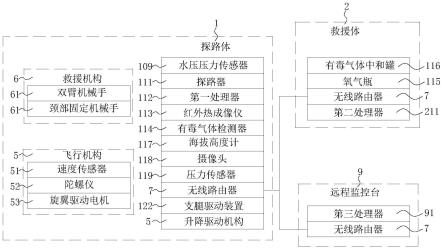
1.适用于狭小空间的深井救援机器人的智能救援方法,其特征在于:所述的救援方法对应的机器人包括水平设置的椭圆球壳形探路体(1),多个球壳形救援体(2),沿竖直方向、探路体(1)与救援体(2)之间、相邻救援体(2)之间通过救援绳(3)相互连接成可拆卸式的串联结构,救援体(2)位于探路体(1)上方,救援绳(3)与探路体(1)、救援体(2)连接的端头处设置自动连接/分离机构,自动连接/分离机构包括分别设置在探路体(1)外表面上端凹槽内、救援体(2)外表面上端凹槽内,可沿竖直方向伸缩的第一电动活塞杆(101),第一电动活塞杆(101)的端头设置挂环(102);所述的救援体(2)外表面下端与救援绳(3)的一端连接,救援绳(3)的另一端与电动挂钩(104)连接,挂环(102)与电动挂钩(104)的尺寸相适应;所述救援体(2)的球半径尺寸小于或等于探路体(1)的水平面截面上其椭圆短轴尺寸;所述的探路体(1)、救援体(2)各自的上端面相应位置设置四旋翼或六旋翼式飞行机构(5),飞行机构(5)包括六角星形状的支架,支架上相应位置分别安装飞行旋翼、蓄电池、速度传感器(51)、陀螺仪(52)、旋翼驱动电机(53);所述探路体(1)的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿(12),支腿(12)收缩进探路体(1)外侧面上相应位置设置的凹槽内后,不突出探路体(1)的外表面;位于探路体(1)外侧面下方的一排支腿(12)向探路体(1)的下方外侧倾斜设置,位于探路体(1)外侧面上方的一排支腿(12)向探路体(1)的上方外侧倾斜设置;所述支腿(12)的外端设置驱动轮,驱动轮内设置轮毂电机及用于制动驱动轮的制动器,驱动轮表面与井壁接触;所述探路体(1)沿水平面截面中其椭圆形长轴附近的支腿(12)完全伸展后的长度小于其椭圆形短轴附近设置的支腿(12)完全伸展后的长度;所述探路体(1)的底部壳体由透明材料制作而成,其底部壳体内侧分别设置无线路由器(7)、水压压力传感器(109)、探路器(111)、第一处理器(112),红外热成像仪(113)、海拔高度计(117)、摄像头(118),探路体(1)底部壳体外侧设置用于固定待救人员的救援机构(6);所述的救援体(2)内设置无线路由器(7)、第二处理器(211);所述的第一处理器(112)、第二处理器(211)通过各自的无线路由器(7)通信,所述的第一处理器(112)、第二处理器(211)还可以通过各自的无线路由器(7)与远程监控台(9)上设置的第三处理器(91)进行无线通信;所述的救援机构(6)包括探路体(1)底部设置的双臂机械手(61),双臂机械手(61)上相应位置设置颈部固定机械手(62);所述的探路体(1)底部壳体外侧还设置有毒气体检测器(114);所述的救援体(2)的底部壳体外侧设置氧气瓶(115)、有毒气体中和罐(116);所述的救援方法依次包括探路定位、现场施救、快速上升;所述的探路定位步骤包括释放探路体、绘制地图、释放救援体、定位;所述的释放探路体步骤为:将探路体(1)放在井口正上方,远程监控台(9)的第三处理器(91)向第一处理器(112)发送启动信号,第一处理器(112)启动飞行机构(5),使探路体(1)以速度v0下降,下降过程中探路器(111)、摄像头(118)实时采集探路体(1)下方一定距离处的多个深井截面图,所述的深井截面图为与探路体(1)运动方向呈90
°
的井壁截面轮廓形状,第一处理器(112)对比探路器(111)、摄像头(118)各自采集的深井截面图,将两个深
井截面图中井壁截面轮廓更大的一个记为第一类深井截面图,另一个记为第二类深井截面图,即井壁截面轮廓周长更大的一个为第一类深井截面图,另一个为第二类深井截面图;所述的绘制地图步骤为:探路体(1)下降的过程中,探路器(111)、摄像头(118)按照一定频率向第一处理器(112)发送探路体(1)下方一定距离处的多个第一类深井截面图、第二类深井截面图,海拔高度计(117)按照时间顺序、将深度h分别标记在第一类深井截面图、第二类深井截面图中,第一处理器(112)提取出第一类深井截面图、第二类深井截面图的轮廓尺寸,以探路体(1)的椭圆球心的运动轨迹为扫描线,分别以第一类深井截面图、第二类深井截面图的轮廓尺寸为截面,以多截面扫略方式绘制出两个三维模型,与第一类深井截面图对应的三维模型记为第一类深井地图,与第二类深井截面图相对应的三维模型记为第二类深井地图;第一处理器(112)实时通过无线路由器(7)向其上方的多个救援体(2)、远程监控台(9)发送第一类深井地图、第二类深井地图;所述的释放救援体步骤为:探路体(1)下降一定深度后,启动救援体(2)上的飞行机构(5),向井内间隔投放多个救援体(2),第二处理器(211)根据探路体(1)的下降速度v0以及第二类深井地图实时调整探路体(2)的下降速度v2,使救援体(2)与探路体(1)之间的距离、相邻救援体(2)之间的距离始终保持在一定范围之内;所述的救援体(2)下降过程中,通过其上设置的无线路由器(7)实时向其上方的多个救援体(2)、远程监控台(9)发送第一类深井地图、第二类深井地图;所述的定位步骤为:当探路体(1)上设置的红外热成像仪(113)探测到下方一定距离处有待救人员时,探路体(1)上的飞行机构(5)减速下降并悬停在空中,探路体(1)减速的同时伸开多个支腿(12),使支腿(12)与井壁轮廓内侧面接触,当探路体(1)相对的两个侧面上各自至少有两个支腿(12)的压力传感器(119)检测到的压力值大于一定值,且速度传感器(51)发送的探路体(1)的下降速度为0,飞行机构(5)停止运动;压力传感器(119)检测的压力值达到预定值的驱动轮动作,使探路体(1)继续下降到待救人员上方一定距离处后停止运动,然后通过无线路由器(7)发出定位信号;探路体(1)上方的多个救援体(2)收到定位信号后以最大速度v3向下运动至探路体(1)附近并与探路体(1)自动连接成串联结构;所述的v3为救援体(2)根据探路体(1)传递的第二类深井地图计算出的最大下降速度,多个救援体(2)下降过程中第二处理器(211)实时调整v3,使相邻救援体(2)之间的安全距离始终保持在一定范围之内;所述的现场施救步骤为:当探路体(1)下降至待救人员上方一定距离处停止运动后,第一处理器(112)分析红外热成像仪(113)传递的待救人员轮廓参数,识别出待救人员的躯干位置、胳膊位置、头部位置,探路体(1)根据待救人员的躯干位置、胳膊位置控制多轴式双臂机械手(61)呈向下的c形,并环抱在待救人员腋下部位;所述的救援体(2)到达待救人员上方并与探路体(1)构成串联式结构后,打开其上设置的氧气瓶(115)、有毒气体中和罐(116),使待救人员附近充满氧气;接着探路体(1)、救援体(2)各自的飞行机构(5)启动,带动待救人员缓慢向上运动一定距离,当待救人员双脚离地后,双臂机械手(61)上设置的颈部固定机械手(62)将待救人员的颈部靠紧;然后红外热成像仪(113)采集待救人员站立状态的外轮廓参数并传递给第一处理器(112);所述的快速上升步骤为:探路体(1)的飞行机构(5)启动,使探路体(1)、救援体(2)共同带动待救人员一起向上飞行,向上飞行过程中救援体(2)对探路体(1)施加一定的拉力,使
相邻救援体(2)之间设置的救援绳(3)、探路体(1)与救援体(2)之间设置的救援绳(3)具有一定的拉紧力;所述的探路体(1)、救援体(2)向上飞行时各自的运动轨迹与探路体(1)、救援体(2)下降时各自的运动轨迹相同;所述的探路定位步骤中,第一处理器(112)实时分析探路体(1)下方的多个第二类深井截面图,当第一处理器(112)判断探路体(1)可以保持水平姿势通过多个第二类深井截面图轮廓,则控制探路体(1)继续以速度v0下降,当第一处理器(112)判断探路体(1)无法保持水平姿态通过其下方的多个第二类深井截面图轮廓,则将探路体(1)与多个第二类深井截面图轮廓干涉的区域标示为障碍物,探路体(1)在障碍物上方一定距离处悬停,并伸开多个支腿(12),使支腿(12)与井壁轮廓内侧面接触,当探路体(1)相对的两个侧面上各自至少有两个支腿(12)的压力传感器(119)检测到的压力值大于一定值,且速度传感器(51)发送的探路体(1)的下降速度为0,则飞行机构(5)停止运动;第一处理器(112)计算探路体(1)依次通过其下方多个障碍物时需要沿竖直平面倾斜的角度,并根据与障碍物同高度且相对应的第一类深井截面图计算出探路体(1)下降过程中,其上多个支腿(12)伸展并与井壁内侧接触的伸展距离d及伸展时间t;然后第一处理器(112)控制多个支腿(12)伸长,使探路体(1)沿竖直平面倾斜一定角度并以速度v1通过障碍物;所述的v1的计算方法为:第一处理器(112)根据与探路体(1)最接近的一个第一类深井截面图计算出多个支腿(12)的伸展距离d及伸展时间t,根据多个伸展时间t中的最大值计算出探路体(1)向下运动至该第一类深井截面图处的最大速度,该最大速度即为v1;当探路体(1)下方没有继续出现障碍物,则探路体(1)恢复水平姿势,并启动飞行机构(5),收起支腿(12),使探路体(1)重新以速度v0继续下降;所述的快速上升步骤中,探路体(1)绕过其上方障碍物的方法与探路体(1)下降时绕过其下方同样的障碍物的方法一致。2.根据权利要求1所述的适用于狭小空间的深井救援机器人的智能救援方法,其特征在于:所述的快速上升步骤中,当探路体(1)、救援体(2)位于水位线以下时,探路体(1)的多个支腿(12)伸展,使探路体(1)、救援体(2)依靠驱动轮上的轮毂电机提供的驱动力上升;当探路体(1)、救援体(2)位于水位线以上时,探路体(1)、救援体(2)各自的飞行机构(5)启动,同时收回支腿(12),探路体(1)、救援体(2)依靠飞行机构(5)提供的驱动力上升。
技术总结
本发明具体涉及一种通过能力强、救援及时、便于携带的适用于狭小空间的深井救援机器人的智能救援方法。所述的机器人包括椭圆球壳形探路体、多个球壳形救援体;探路体、救援体各自的上端面相应位置设置四旋翼或六旋翼式飞行机构,探路体的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿;救援机器人可以依靠飞行机构或支腿在井下实现飞行运动或爬行运动,体积紧凑且可以满足水下救援,探路体下降时遇到障碍物可以进行躲避,通过能力强,适合狭小空间救援。探路体下降时绘制第一类深井地图、第二类深井地图有利于提高救援体、探路体的下降速度以及上升速度。的下降速度以及上升速度。的下降速度以及上升速度。
技术研发人员:陈子龙
受保护的技术使用者:西华大学
技术研发日:2017.03.28
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。