1.本发明涉及光缆外表面检测领域,尤其涉及一种自主光缆巡检机器人控制方法及机器人。
背景技术:
2.光缆是实现和保障通信的重要组成部分。由于其经常通过人迹少见但动物活动频繁的山林地区,经常发生因被啮齿动物啃咬而造成光缆损坏或者完全断裂的情况。以安吉公司为例,每年的光缆故障事件中,动物啃咬占到了总数一半左右。其中,大部分啃咬发生于山川、河流、林区等植被茂密的区域,传统的人力排查方式存在时效性低,排查光缆损坏并定位损坏位置成本高等问题,因此亟需一种高效率自动化排查装备。
3.公开号cn211627410u,公告日2020年10月02日,公开了一种架空光缆线路检测装置,包括把手(1)、和位于把手(1)上部的伸缩杆(2),其特征在于:所述伸缩杆(2)的上部设置有u形架(3),所述u形架(3)的下侧设置有观察摄像头(4),所述u形架(3)顶端的两侧通过转轴(501)连接有挂钩(5),所述u形架(3)的侧端面平面与挂钩(5)的侧端面呈垂直关系。所述挂钩(5)的顶部设置有反光架(7),所述反光架(7)的下端面固定有反光镜(701)。通过挂钩挂住架空的光缆,再通过摄像头观察光缆的表皮是否有破损,观察结果更清晰,光缆表皮破损的辨识度得到提高,设置的放光镜可以辅助摄像头对光缆表皮多角度的观察。
技术实现要素:
4.本发明是为了克服现有技术的光缆线路检测存在采用人工排查光缆是否损坏定位损坏位置,操作效率低,操作困难的问题,提供一种自动排查光缆并定位光缆故障并报警的自主光缆巡检机器人控制方法及机器人。
5.为实现上述目的,本发明采用以下技术方案:一种自主光缆巡检机器人控制方法,包括:获取当前巡检机器人检测到的光缆破损信号;根据所述光缆破损信号控制所述巡检机器人停止移动;根据所述光缆破损信号提取机器人运行数据;根据所述运行数据确定机器人所处位置;机器人发出声光报警信号,并实时发送当前机器人所处位置信息及光缆破损信号数据。当机器人检测到光缆存在损坏时,会控制机器人停止在检测到损坏的位置,将当前位置光缆的数据通过无线传输方式传输到控制台,并发出声光报警提醒操作人员检测到光缆异常,便于工作人员进行后续工作准备。
6.作为优选,所述获取当前巡检机器人检测到的光缆破损信号包括:三个或者三个以上的摄像头通过环形视角拍摄光缆缆身,若干摄像头拍摄视角的总和≥360
°
;将若干摄像头拍摄的图像平铺形成目标图像;
对目标图像进行分割处理,对分割所得的图像单元与破损信息库中的数据进行对比分析,若相似度大于设定阈值,则确定该单元区域内光缆存在损坏点;若存在损坏点时,获取该损坏点对应的损坏级别;图像单元根据损害级别显示对应的颜色。
7.控制器中的图像处理单元对摄像头拍摄图像进行处理,损害特征提取,损害级别判定,并根据判定的故障级别选择对应故障级别颜色,在图像单元数据与对应故障级别颜色数据绑定;红色代表最高级别故障,绿色代表无故障,其余等级故障用黄色代表。
8.作为优选,所述根据所述光缆破损信号提取机器人运行数据包括通过编码器计算机器人的运行距离。控制中心可同时获取故障点位于光缆的位置,故障图像和故障等级,便于工作人员做维修规划和准备。
9.一种自主光缆巡检机器人,所述机器人包括机器人主体、主控单元、电源管理单元、通讯单元、采集单元和运动控制单元,所述主电源管理单元、通讯单元、采集单元和运动控制单元均与主控单元电连接。所述电源管理单元、通讯单元和主控单元设置在主体内。机器人主体可以套在光缆外表面在光缆表面前进,代替巡检人员完成光缆的巡检任务。
10.作为优选,所述机器人主体呈环形,机器人主体包括第一环臂和第二环臂,所述第一环臂的一端与第二环臂的一端铰轴连接,所述第一环臂另一端与第二环臂另一端通过螺纹连接结构连接。环形机器人主体可通过拧开螺纹连接结构打开第一环臂和第二环臂连接处,将机器人套装到线缆外表面,然后拧上螺纹连接结构,使机器人整体悬挂在线缆上,从而进行线缆巡查,同时机器人的环形结构轻便,方便巡查人员携带安装。
11.作为优选,所述螺纹连接结构包括设置在第一环臂另一端端面的螺栓、设置在第二环臂另一端端面的螺母结构,所述螺母结构包括环形基座和螺母,所述环形基座与第二环臂另一端端面固定连接,所述螺母与环形基座旋转连接,所述螺母内设有内螺纹,所述螺栓表面设有与内螺纹相匹配的外螺纹。螺母外表面设有凸起防滑条纹,第二环臂端部设有凹槽,所述凹槽与基座环形中空部分相通,通过调节螺栓旋入凹槽的深度调节第一环臂与第二环臂连接端面的距离。
12.作为优选,所述摄像采集单元包括在机器人主体侧面上等弧分布的至少三个摄像头,所述摄像头视角朝向环形主体轴向设置。摄像头通过环形视角拍摄光缆缆身,若干摄像头拍摄视角的总和≥360
°
;作为优选,所述运动控制单元,包括驱动电机、行进轮和行进轮支架,所述行进轮支架与所述环形机器人主体一侧面连接,所述行进轮转动安装在行进轮支架上,所述驱动电机与行进轮支架固定安装,所述驱动电机与行进轮连接。在机器人收到工作指令时,控制器控制驱动电机工作,驱动电机带动行进轮沿光缆向前移动,机器人开始工作,将收集到的光缆信息通过通信单元传输给控制中心。
13.因此,本发明机器人检测方法具有如下有益效果:机器人检测到光缆存在损坏时,会控制机器人停止在检测到损坏的位置,将当前位置光缆的数据通过无线传输方式传输到控制台,并发出声光报警提醒操作人员检测到光缆异常,便于工作人员进行后续工作准备。
14.本发明还公开了一种自主光缆巡检机器人,环形结构机器人主体可以悬挂在光缆上,配合运动控制单元在光缆上稳定移动采集光缆数据。
附图说明
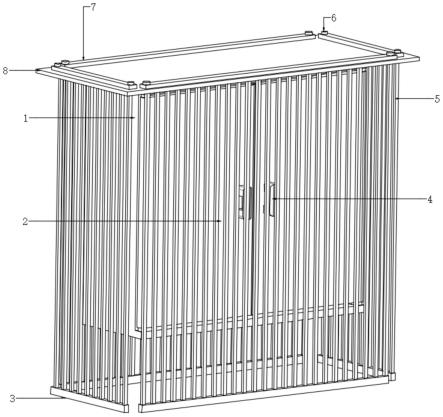
15.图1是本发明一实施例机器人侧面结构示意图。
16.图2是本发明一实施例机器人结构示意图。
17.图中:1、主体 2、摄像头 3、驱动电机 4、行进轮 5、行进轮支架 6、第一环臂 7、第二环臂 8、铰轴 9、螺栓 10、螺母 11、基座。
具体实施方式
18.下面结合附图与具体实施方式对本发明做进一步的描述。
19.实施例:一种自主光缆巡检机器人控制方法,包括:获取当前巡检机器人检测到的光缆破损信号;三个或者三个以上的摄像头通过环形视角拍摄光缆缆身,若干摄像头拍摄视角的总和≥360
°
;将若干摄像头拍摄的图像平铺形成目标图像;对目标图像进行分割处理,对分割所得的图像单元与破损信息库中的数据进行对比分析,若相似度大于设定阈值,则确定该单元区域内光缆存在损坏点;若存在损坏点时,获取该损坏点对应的损坏级别;图像单元根据损害级别显示对应的颜色。
20.控制器中的图像处理单元对摄像头拍摄图像进行处理,损害特征提取,损害级别判定,并根据判定的故障级别选择对应故障级别颜色,在图像单元数据与对应故障级别颜色数据绑定;红色代表最高级别故障,绿色代表无故障,其余等级故障用黄色代表。
21.根据所述光缆破损信号控制所述巡检机器人停止移动;根据所述光缆破损信号提取机器人运行数据;根据所述运行数据确定机器人所处位置;通过编码器计算机器人的运行距离;机器人发出声光报警信号,并实时发送当前机器人所处位置信息及光缆破损信号数据。当机器人检测到光缆存在损坏时,会控制机器人停止在检测到损坏的位置,将当前位置光缆的数据通过无线传输方式传输到控制台,并发出声光报警提醒操作人员检测到光缆异常,便于工作人员进行后续工作准备。
22.本发明还公开了一种自主光缆巡检机器人,包括环形机器人主体1、驱动电机3、行进轮4、行进轮支架5、通信单元、摄像单元、语音单元、报警指示灯、控制器和电池,主体1包括第一环臂6和第二环臂7,所述第一环臂6的一端与第二环臂7的一端铰轴8连接,铰轴8内部设有连接第一环臂6和第二环臂7的电连接部,所述第一环臂6另一端与第二环臂7另一端通过螺纹连接结构连接。螺纹连接结构包括设置在第一环臂6另一端端面的螺栓9、设置在第二环臂7另一端端面的螺母10结构,所述螺母10结构包括环形基座11和螺母10,所述环形基座11与第二环臂7另一端端面固定连接,所述螺母10与环形基座11旋转连接,所述螺母10内设有内螺纹,所述螺栓9表面设有与内螺纹相匹配的外螺纹;主体1外环直径为15cm~20cm。环形机器人主体1可通过拧开螺纹连接结构打开第一环臂6和第二环臂7连接处,将机器人套装到线缆外表面,然后拧上螺纹连接结构,使机器人整体悬挂在线缆上,从而进行线缆巡查,同时机器人的环形结构轻便,方便巡查人员携带安装。
23.所述行进轮支架5与所述环形机器人主体1一侧面连接,所述行进轮4转动安装在行进轮支架5上,所述驱动电机3与行进轮支架5固定安装,所述驱动电机3与行进轮4连接,行进轮4的轮面上设有点状凸起;所述通信单元和控制器均设置在机器人主体1内部,所述摄像单元包括若干设置在机器人主体1与行进轮4相对的另一侧面上的三个摄像头2,三个摄像头2两两分隔120 度等弧分布。
24.所述通信单元、语音单元、指示灯、驱动电机3以及摄像单元均与控制器连接,所述电池安装在主体1内部为机器人供电。
25.该悬挂式自主光缆巡检机器人可以套在光缆外表面在光缆表面前进,代替巡检人员完成光缆的巡检任务,在机器人收到工作指令时,控制器控制驱动电机3工作,驱动电机3带动行进轮4沿光缆向前移动,机器人开始工作,将收集到的光缆信息通过通信单元传输给控制中心。
26.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
27.尽管本文较多地使用了光缆破损信号、行进轮、拍摄视角等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。