技术特征:
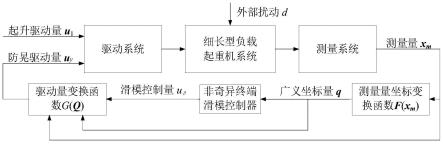
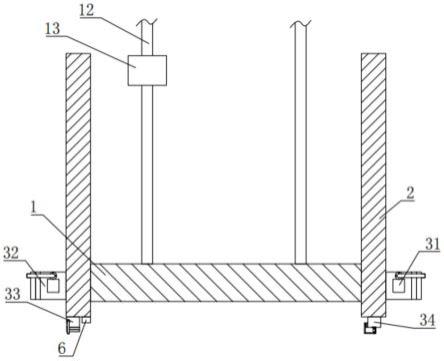
1.一种细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,包括以下步骤:以竖直方向为z轴建立坐标系,并设t点为起吊绳与小车的固定点,n为地面上一点且满足tn垂直于地面,p点为细长型负载与地面的接触点;细长型负载起吊过程中,吊钩晃动的瞬时轨迹看作是绕轴tp的圆轨迹;设该圆轨迹的圆心为c,半径为r,该圆轨迹与平面ptn的交点为d,cd和c与吊钩连线的夹角为晃动角θ,tp与pn的夹角为α,pn与x轴夹角为β;起吊过程中,获取细长型负载垂直起吊过程的测量量x
m
=[x y l
1 γ
x γ
y
]
t
;其中,x和y分别为大车和小车的位移,即t点的横纵坐标;l1为起吊绳长;γ
x
和γ
y
分别为起吊绳在x-z平面和y-z平面的投影与z轴的夹角;基于几何关系,根据实时测量量x
m
=[x y l
1 γ
x γ
y
]
t
计算出广义坐标量q=[α β r θ]
t
;基于动力学分析,利用广义坐标量建立细长型负载垂直起吊的非线性三维动力学模型;再利用等效滑模控制方法,建立基于广义坐标量的非奇异终端滑模控制模型;基于几何关系,将非奇异终端滑模控制模型输出转化为可被利用的驱动系统输入,实现细长型负载垂直起吊的晃动抑制和水平方向稳定。2.根据权利要求1所述的细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,利用测量坐标变换函数f(x
m
)计算广义坐标量q,测量坐标变换函数f(x
m
)如下:f(x
m
)=[f
α
(x,y) f
β
(x,y) f
r
(x,y,l1) f
θ
(x
m
)]
t
其中:其中:其中:其中:其中:其中:
式中,h为tn高度,x
d
和y
d
分别为p点横纵坐标,l2为吊钩与p点的距离,d为外部扰动,r为3.根据权利要求1所述的细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,细长型负载垂直起吊的非线性三维动力学模型如下:其中其中r是d是外部扰动,并假设d存在上界d,即|d|≤d;在f2中,中,中,和在p8的表达式中,m被定义为等效质量比,其表达式为m1为吊钩质量,l2为吊钩与p点的距离,l3和m2分别为细长型负载的长度和质量,ρ为细长型负载线密度,满足4.根据权利要求3所述的细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,利用等效滑模控制方法,建立基于广义坐标量的非奇异终端滑模控制模型包括:选取滑模控制量为u
β
,根据等效滑模控制策略,滑模控制模型由等效控制和切换控制两部分组成,则有:
u
β
=u
eq1
u
eq2
u
sw
定义终端滑模面函数为:其中,c1和c2为正实数,p1,q1,p2和q2为正奇整数,满足1<p1/q1<2,1<p2/q2<2;通过计算和可得等效控制为:基于分层滑模方法,二级滑模面定义为:s=s1 λs2式中,λ为一个小于0的参数;采用切换控制率来满足滑模面的到达条件,有:式中,ε>0;同时,采用饱和函数替换符号函数,即其中,δ描述边界层厚度;可得切换控制模型为:5.根据权利要求4所述的细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,由于切换控制模型中,分母项在实际应用中可能等于0,从而导致奇异问题,因此通过修改切换控制率可得到非奇异终端滑模切换控制率如下:最终可得基于广义坐标量的非奇异终端滑模控制模型为:6.根据权利要求5所述的细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,基于几何关系,将非奇异终端滑模控制模型输出转化为可被利用的驱动系统输入具体为:
非奇异终端滑模控制模型根据广义坐标量计算滑模控制量u
β
,然后驱动坐标变换函数结合测量量、广义坐标量将滑模控制量u
β
转换为防晃驱动量,并配合起升驱动量在细长型负载垂直起吊过程中实现负载晃动抑制和水平方向稳定。7.根据权利要求6所述的细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,其特征在于,驱动坐标变换函数可通过对下式求二阶导数得到:最终,驱动坐标变换函数为:其中,
技术总结
本发明公开了一种细长型负载垂直起吊过程的非奇异终端滑模防晃控制方法,包括以下步骤:基于拉格朗日动力学分析方法,利用广义坐标量建立了细长型负载起吊过程的非线性三维动力学模型;在此基础上,利用等效控制方法,建立了由等效控制和切换控制组成非奇异终端滑模控制模型;同时,提出了一种控制策略,利用两次坐标变换,解决了实际起重机上广义坐标量难以被测量和控制的问题。本发明可解决存在外部干扰的情况下细长型负载起吊晃动的问题,易于工业应用,可以显著提高起重机工作效率和运行稳定性。稳定性。稳定性。
技术研发人员:汪小凯 夏明辉 华林 郑戈飞
受保护的技术使用者:武汉理工大学
技术研发日:2022.02.18
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。