一种基于弹性bp随机森林融合的压力工况识别方法
技术领域
1.本发明属于工况识别领域,具体的说是一种基于弹性bp随机森林融合的压力工况识别方法。
背景技术:
2.随着工业的迅速发展,压力设备是许多工业生产中不可或缺的设备。因此,为提高生产效率,大多数工业生产场景将压力设备作为研究对象,对其进行优化。比如锅炉设备能够通过对主汽压力的工况识别来判断其燃烧状态,输油泵设备可以根据出口压力的变化趋势来判断其运行状态的好坏等。由于工业场景普遍存在非线性、强耦合和大滞后等特点,关键参数无法通过常规方式获取,从而无法对当前工业场景做出及时并准确的判断。
3.对于燃煤电站,锅炉设备运行状况的好坏在很大程度上决定了整台机组的安全性和经济性。因此,传统方法选取火检信号、主汽压力和炉膛压力等参数作为特征,将工况分为主汽压力下降、主汽压力平稳和主汽压力上升这三种工况,这种方法提高了对识别锅炉的燃烧状态稳定性,但是存在机组负荷的频繁变动以及入炉煤质变差等原因,传统的工况识别方法不能完全反应实际锅炉的燃烧状态。
4.就油气输送系统而言,输油泵在石油输送过程中起到十分重要的作用,保证其平稳和安全的运行。随着技术的不断更新与发展,油气输送系统的自动化程度得到提升,但对设备进行工况识别时,仍局限于传统方法,将工况分为出口压力下降、出口压力平稳和出口压力上升这三种工况。由于油气输送系统存在音波信号等外界扰动,传统方法无法彻底去除噪声,并且传统方法对未知工况也会产生误判,因此,传统方法无法准确地识别输油泵的工况。
5.对于大多数的工业场景,都与上述情况类似。针对压力设备的工况识别,大多基于压力设备的典型工况方法识别压力工况,将工况分为压力下降工况、压力平稳工况和压力上升工况。这种工况识别方法,虽然能够识别压力设备的大部分工况,减少人为误判情况发生的概率,但对于实际生产较为复杂的工业场景,传统压力工况识别的结果,无法准确地描述压力设备的工况,从而导致压力设备的实际控制效果不够理想。
技术实现要素:
6.本发明是为了解决上述现有技术存在的不足之处,提出一种基于弹性bp随机森林融合算法的压力工况识别方法,以期能准确并快速的识别压力设备的工况,解决压力设备在传统工况识别方法中无法准确描述设备压力工况的问题,从而能满足实际工业场景的需求。
7.本发明为达到上述发明目的,采用如下技术方案:
8.本发明一种基于弹性bp随机森林融合的压力工况识别方法的特点是按如下步骤进行:
9.步骤1、对原始数据集di进行预处理;
10.步骤1.1、按照采样周期f采集压力设备在第i个段时间ti内的m类特征构成非压力特征数据集d
′i,且d
′i={d
i,1
,...,d
i,m
,...,d
i,m
},其中,d
i,m
表示第i个段时间ti内的第m类特征,且d
i,m
={x
i,1,m
,...,x
i,t,m
,...,x
i,t,m
},x
i,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻的特征值;
11.按照所述采样周期f采集压力设备在第i-1个段时间t
i-1
内的压力特征且其中,表示第i-1个段时间t
i-1
内第t时刻的压力值;
12.按照所述采样周期f采集压力设备在第i个段时间ti内的压力特征且其中,表示第i个段时间ti内第t时刻的压力值;
13.由所述非压力特征数据集di′
、第i-1个段时间t
i-1
内的压力特征和第i个段时间ti内的压力特征组成第i个段时间ti内的原始数据集di;
14.步骤1.2、定义第i个段时间ti内第m类特征d
i,m
中每个特征值的趋势标签的种类包括:下降趋势为w1,平稳趋势为w2,上升趋势为w3,从而利用式(1)对所述原始数据集di中所有的特征值进行趋势识别,得到所有特征值的趋势标签:
[0015][0016]
式(1)中,x
i,t-1,m
表示第i个段时间ti内第m类特征d
i,m
中第t-1时刻的特征值,w
1,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻的特征值x
i,t-1,m
的趋势标签为下降趋势w1,w
2,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻特征值x
i,t-1,m
的趋势标签为平稳趋势w2,w
3,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻特征值x
i,t-1,m
的趋势标签为上升趋势w3;
[0017]
步骤1.3、设定典型工况标签的种类包括:压力下降的典型工况标签c1,非典型工况标签c2,压力上升的典型工况标签c3;根据压力设备的典型工况以及第i个段时间ti内m类特征在第t时刻特征值的趋势标签,得到第i个段时间ti内第t时刻的典型工况标签;
[0018]
将第m类特征d
i,m
中第t时刻特征值x
i,t,m
的趋势标签及其对应的典型工况标签作为一个典型工况样本,从而得到第i个段时间ti内t
′
个典型工况样本组成的典型工况数据集d
i,1
,其中,t
′
=ti/f;
[0019]
步骤1.4、将所述原始数据集di中的所有数据进行归一化处理,分别得到第i个段时间ti内归一化的非压力特征数据集d
′
i,2
={d
′
i,1
,...,d
′
i,m
,...,d
′
i,m
}、第i-1个段时间t
i-1
内归一化的压力特征以及第i个段时间ti内归一化后的压力特征中其中,d
′
i,m
表示第i个段时间ti内归一化的第m类特征;
[0020]
由第i个段时间ti内归一化的m类特征中所有第t时刻的特征值、压力特征中第t时刻的压力值以及压力特征中第t时刻的压力值构成第t时刻的一个回归样本,从而得到第i个段时间ti内t
′
个回归样本组成的压力数据集d
i,2
;
[0021]
步骤2、通过随机森林算法建立分类模型;
[0022]
步骤2.1、定义抽样次数为k,并初始化k=1,将所述典型工况数据集d
i,1
按一定比例划分成典型工况训练集d
i,1train
与典型工况测试集d
i,1test
,从而得到含有n1个典型工况样本的压力训练集d
i,1train
和含有n2个典型工况样本的压力测试集d
i,1test
,0<n2<n1<t
′
;
[0023]
定义并初始化所述典型工况训练集d
i,1train
的oob误差估计,定义最大抽样次数为k
max
,即决策树的最大数量;
[0024]
步骤2.2、通过bootstrap抽样方法,从所述典型工况训练集d
i,1train
的m类特征中第k次随机选取l类特征并进行训练,得到第k棵决策树,0<l≤m;
[0025]
步骤2.3、将k 1赋值给k后,判断抽样次数k≥k
max
是否成立,若成立,则获得k
max
棵决策树,并组成随机森林;否则,返回步骤2.2执行;
[0026]
步骤2.4、将典型工况测试集d
i,1test
中的m类特征作为所述随机森林的输入向量,将对应的典型工况标签作为所述随机森林的输出向量;从而由随机森林得到k
max
棵决策树的分类预测结果p={p1,p2,...,pk,...,p
kmax
},其中,pk表示第k棵决策树的典型工况预测结果;
[0027]
对所述分类预测结果p进行投票,并统计k
max
棵决策树的投票结果,获得典型工况标签集合其中,表示典型工况测试集d
i,1test
中第n2个典型工况样本依据投票结果得到的典型工况标签;
[0028]
步骤3、基于弹性bp神经网络建立回归模型;
[0029]
步骤3.1、将所述压力数据集d
i,2
按一定比例划分成压力训练集d
i,2train
与压力测试集d
i,2test
,从而得到含有n1个回归样本的压力训练集d
i,2train
和含有n2个回归样本的压力测试集d
i,2test
;
[0030]
将压力训练集d
i,2train
中的m类特征以及第i-1个段时间t
i-1
内归一化的压力特征作为弹性bp神经网络的输入向量,以第i个段时间ti内归一化的压力特征作为弹性bp神经网络的输出向量,从而训练所述弹性bp神经网络,并通过正向传播得到输出层的输出向量为再根据梯度下降法将输出层的输出向量与期望输出向量进行对比,得到输出误差,同时在反向传播时,调整输入层与隐含层之间以及隐含层与输出层之间的权值,从而得到弹性bp神经网络回归模型;其中,表示压力训练集d
i,2train
中第n1个回归样本经正向传播后得到的中间值,表示压力训练集d
i,2train
中第n1个回归样本在第i个段时间ti内的压力值;
[0031]
步骤3.2、将压力测试集d
i,2test
中的m类特征以及第i-1个段时间t
i-1
内归一化的压力特征作为弹性bp神经网络回归模型的输入向量,从而由所述弹性bp神经网络回归模型获得压力预测值集合其中,表示压力测试集d
i,2test
中第n2个回归样本经过回归模型后得到的压力预测值;
[0032]
步骤4、建立融合算法的压力工况识别模型;
[0033]
步骤4.1、定义融合算法的工况标签分别为:l1为压力下降工况标签,l2为压力平稳工况标签,l3为压力上升工况标签,l4为压力波动工况标签,l5为非典型工况标签;
[0034]
步骤4.2、通过式(2)计算压力预测值的变化量
[0035][0036]
式(2)中,表示压力测试集d
i,2test
中第n
2-1个回归样本经过回归模型后得到的压力预测值;
[0037]
步骤4.3、定义压力趋势标签的种类包括:压力下降标签r1、压力平稳标签r2和压力上升标签r3,通过式(3)对压力预测值集合y进行趋势识别,从而获得压力趋势对应的压力趋势标签集合其中,表示第n2个回归样本对应的压力趋势标签:
[0038][0039]
式(3)中,表示压力测试集d
i,2test
中第n2个回归样本的压力趋势标签为压力下降标签r1,表示压力测试集d
i,2test
中第n2个回归样本的压力趋势标签为压力平稳标签r2,表示压力测试集d
i,2test
中第n2个回归样本的压力趋势标签为压力上升标签r3;
[0040]
步骤4.4、设定阈值σ,则阈值范围为[-σ,σ],根据压力工况评价规则,将典型工况标签与压力趋势标签进行对比,得到融合算法的第n2个工况标签
[0041]
(1)若且且变化量则获得第n2个回归样本的压力下降工况标签l1;
[0042]
(2)若且或者且或者且或者且并且变化量或者则获得第n2个回归样本的压力平稳工况标签l2;
[0043]
(3)若且且变化量则获得第n2个回归样本的压力上升工况标签l3;
[0044]
(4)若且或者且且变化量则获得第n2个回归样本的压力波动工况标签l4;
[0045]
(5)若则获得第n2个回归样本的非典型工况标签l5。
[0046]
与现有技术相比,本发明的有益效果在于:
[0047]
1、本发明相比传统的工况识别方法,采用准确度较高的分类模型与收敛速度较快的回归模型,并使用压力工况评价规则,解决了传统工况识别方法无法准确描述该设备压力工况的问题,减少了工况识别所需的时间,而且具有较强的鲁棒性,能够满足实际工业场景的需求。
[0048]
2、本发明采用趋势识别的方法,将数据预处理分别得到特征值趋势标签和压力趋势标签,与直接使用样本数据作为特征相比,从样本的趋势变化中提取出特征,不仅大幅减
小了工况识别所需的计算量,而且该方案非常贴合实际工业中的压力工况识别场景。
[0049]
3、本发明提出了一种压力工况评价规则,对压力设备的典型工况做进一步划分,从而更准确地描述压力设备的工况,并且通过压力工况评价规则获得的结果,充分参考了两种模型的结果,防止单一算法发生误识别的概率,从而提高了工况识别模型的运行效率。
[0050]
4、本发明采用融合工况模型对压力设备工况进行识别的方法,相比传统工况识别方法,解决了传统工况识别方法中使用单一模型描述压力设备工况的局限性,本发明能够在原有压力典型工况的基础上,划分出压力平稳工况和压力波动工况,从而更加准确地描述压力设备运行状态。
附图说明
[0051]
图1为本发明oob误差估计图;
[0052]
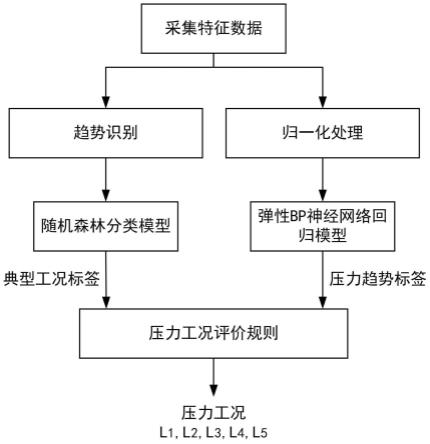
图2为本发明融合模型的压力工况识别流程图;
[0053]
图3a为本发明传统典型压力工况识别结果图;
[0054]
图3b为本发明融合算法压力工况识别结果图。
具体实施方式
[0055]
本实施例中,一种基于弹性bp随机森林融合的压力工况识别方法,是按如下步骤进行:
[0056]
步骤1、对原始数据集di进行预处理;
[0057]
步骤1.1、按照采样周期f采集压力设备在第i个段时间ti内的m类特征构成非压力特征数据集d
′i,且d
′i={d
i,1
,...,d
i,m
,...,d
i,m
},其中,d
i,m
表示第i个段时间ti内的第m类特征,且d
i,m
={x
i,1,m
,...,x
i,t,m
,...,x
i,t,m
},x
i,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻的特征值;
[0058]
按照采样周期f采集压力设备在第i-1个段时间t
i-1
内的压力特征且其中,表示第i-1个段时间t
i-1
内第t时刻的压力值;
[0059]
按照采样周期f采集压力设备在第i个段时间ti内的压力特征且其中,表示第i个段时间ti内第t时刻的压力值;
[0060]
由非压力特征数据集d
′i、第i-1个段时间t
i-1
内的压力特征和第i个段时间ti内的压力特征组成第i个段时间ti内的原始数据集di,本实施例中,压力设备为水泥烧成系统中的篦冷机,压力特征是篦压,第一段时间t1为2500分钟,采样周期f为5s,采集该时间段的篦压第二段时间t2也为2500分钟,采样周期f为5s,但时间段t2比t1滞后一个采样周期,采集该时间段的特征分别为篦速、窑电流、生料喂料量和篦压因此由这5类特征共同构成原始数据集d2;
[0061]
步骤1.2、定义第i个段时间ti内第m类特征d
i,m
中每个特征值的趋势标签的种类包括:下降趋势为w1,平稳趋势为w2,上升趋势为w3,从而利用式(1)对原始数据集di中所有的特征值进行趋势识别,得到所有特征值的趋势标签:
[0062][0063]
式(1)中,x
i,t-1,m
表示第i个段时间ti内第m类特征d
i,m
中第t-1时刻的特征值,w
1,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻的特征值x
i,t-1,m
的趋势标签为下降趋势w1,w
2,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻特征值x
i,t-1,m
的趋势标签为平稳趋势w2,w
3,t,m
表示第i个段时间ti内第m类特征d
i,m
中第t时刻特征值x
i,t-1,m
的趋势标签为上升趋势w3;
[0064]
步骤1.3、设定典型工况标签的种类包括:压力下降的典型工况标签c1,非典型工况标签c2,压力上升的典型工况标签c3;根据压力设备的典型工况以及第i个段时间ti内m类特征在第t时刻特征值的趋势标签,得到第i个段时间ti内第t时刻的典型工况标签,本实施例中,典型工况选取篦冷机典型工况,如表1所示:
[0065]
表1
[0066][0067]
将第m类特征d
i,m
中第t时刻特征值x
i,t,m
的趋势标签及其对应的典型工况标签作为一个典型工况样本,从而得到第i个段时间ti内t
′
个典型工况样本组成的典型工况数据集d
i,1
,其中,t
′
=ti/f,本实施例中,典型工况数据集d
2,1
中的一个典型工况样本由篦速、窑电流和生料喂料量的趋势标签以及对应的典型工况标签构成,一共30000个典型工况样本;
[0068]
步骤1.4、将原始数据集di中的所有数据进行归一化处理,分别得到第i个段时间ti内归一化的非压力特征数据集d
′
i,2
={d
′
i,1
,...,d
′
i,m
,...,d
′
i,m
}、第i-1个段时间t
i-1
内归一化的压力特征以及第i个段时间ti内归一化后的压力特征中其中,d
′
i,m
表示第i个段时间ti内归一化的第m类特征;
[0069]
由第i个段时间ti内归一化的m类特征中所有第t时刻的特征值、压力特征中第t时刻的压力值以及压力特征中第t时刻的压力值构成第t时刻的一个回归样本,从而得到第i个段时间ti内t
′
个回归样本组成的压力数据集d
i,2
,本实施例中,由于每个特征的量纲不同,为避免样本丢失数据的特征对其进行归一化,因此压力数据集d
2,2
中一个回归样本
由篦速、窑电流、生料喂料量、两个时间段的篦压和构成,一共30000组回归样本;
[0070]
步骤2、通过随机森林算法建立分类模型;
[0071]
步骤2.1、定义抽样次数为k,并初始化k=1,将典型工况数据集d
i,1
按一定比例划分成典型工况训练集d
i,1train
与典型工况测试集d
i,1test
,从而得到含有n1个典型工况样本的压力训练集d
i,1train
和含有n2个典型工况样本的压力测试集d
i,1test
,0<n2<n1<t
′
;定义并初始化典型工况训练集d
i,1train
的oob误差估计,定义最大抽样次数为k
max
,即决策树的最大数量,本实施例中,将典型工况数据集按7:3的比例划分成训练集和测试集,所以测试集含有9000个典型工况样本,通过oob误差估计曲线,设定随机森林中决策树的最大数量,这样能够在不影响算法准确性的前提下,提高算法的运行效率,本实施例中,oob误差估计曲线如图1所示,当决策树数量为25时,oob分类误差趋于稳定,因此设定最大抽样次数为25;
[0072]
步骤2.2、通过bootstrap抽样方法,从典型工况训练集d
i,1train
的m类特征中第k次随机选取l类特征并进行训练,得到第k棵决策树,0<l≤m;
[0073]
步骤2.3、将k 1赋值给k后,判断抽样次数k≥k
max
是否成立,若成立,则获得k
max
棵决策树,并组成随机森林;否则,返回步骤2.2执行;
[0074]
步骤2.4、将典型工况测试集d
i,1test
中的m类特征作为随机森林的输入向量,将对应的典型工况标签作为随机森林的输出向量;从而由随机森林得到k
max
棵决策树的分类预测结果p={p1,p2,...,pk,...,p
kmax
},其中,pk表示第k棵决策树的典型工况预测结果;
[0075]
对分类预测结果p进行投票,并统计k
max
棵决策树的投票结果,获得典型工况标签集合其中,表示典型工况测试集d
i,1test
中第n2个典型工况样本依据投票结果得到的典型工况标签;
[0076]
步骤3、基于弹性bp神经网络建立回归模型,本实例中,将压力数据集按7:3的比例划分成训练集和测试集,所以测试集含有9000个回归样本,设定神经网络参数:隐含层层数为15,训练目标精度为0.0001,最大训练次数为5000,其余为默认参数;
[0077]
步骤3.1、将压力数据集d
i,2
按一定比例划分成压力训练集d
i,2train
与压力测试集d
i,2test
,从而得到含有n1个回归样本的压力训练集d
i,2train
和含有n2个回归样本的压力测试集d
i,2test
;
[0078]
将压力训练集d
i,2train
中的m类特征以及第i-1个段时间t
i-1
内归一化的压力特征作为弹性bp神经网络的输入向量,以第i个段时间ti内归一化的压力特征作为弹性bp神经网络的输出向量,从而训练弹性bp神经网络,通过正向传播得到输出层的输出向量为再根据梯度下降法将输出层的输出向量与期望输出向量进行对比,得到输出误差,同时在反向传播时,调整输入层与隐含层之间以及隐含层与输出层之间的权值,从而得到弹性bp神经网络回归模型;其中,表示压力训练集d
i,2train
中第n1个回归样本经正向传播后得到的中间值,表示压力训练集d
i,2train
中第n1个回归样本在第i个段时间ti内的压力值;
[0079]
步骤3.2、将压力测试集d
i,2test
中的m类特征以及第i-1个段时间t
i-1
内归一化的压力特征作为弹性bp神经网络回归模型的输入向量,从而由弹性bp神经网络回归模型获
得压力预测值集合其中,表示压力测试集d
i,2test
中第n2个回归样本经过回归模型后得到的压力预测值;
[0080]
步骤4、建立融合算法的压力工况识别模型,其流程图如图2所示;
[0081]
步骤4.1、定义融合算法的工况标签分别为:l1为压力下降工况标签,l2为压力平稳工况标签,l3为压力上升工况标签,l4为压力波动工况标签,l5为非典型工况标签,压力下降工况是在一段时间内,压力持续下降;压力平稳工况是在一段时间内,压力趋势的变化较小的工况;压力上升工况是在一段时间内,压力持续上升;压力波动工况是压力变化幅度介于工况l2与工况l1l3之间的工况;
[0082]
步骤4.2、通过式(2)计算压力预测值的变化量
[0083][0084]
式(2)中,表示压力测试集d
i,2test
中第n
2-1个回归样本经过回归模型后得到的压力预测值;
[0085]
步骤4.3、定义压力趋势标签的种类包括:压力下降标签r1、压力平稳标签r2和压力上升标签r3,通过式(3)对压力预测值集合y进行趋势识别,从而获得压力趋势对应的压力趋势标签集合其中,表示第n2个回归样本对应的压力趋势标签:
[0086][0087]
式(3)中,r
1,n2
表示压力测试集d
i,2test
中第n2个回归样本的压力趋势标签为压力下降标签r1,表示压力测试集d
i,2test
中第n2个回归样本的压力趋势标签为压力平稳标签r2,表示压力测试集d
i,2test
中第n2个回归样本的压力趋势标签为压力上升标签r3;
[0088]
步骤4.4、设定阈值σ,则阈值范围为[-σ,σ],应取介于压力上升下降与压力平稳之间的压力值作为阈值,本实施例中,根据篦压趋势的变化规律,设定σ为30pa,所以阈值范围为-30pa~30pa,根据压力工况评价规则,首先,两种模型的计算结果不会完全相同,需要一些规则对结果进行整合,其次实际工业场景也存在各种扰动影响这两种模型的预测结果,因此提出了压力工况评价规则,既能减少模型本身对工况的误判,也能减少外界扰动对最终结果的影响,根据压力工况评价规则,将典型工况标签与压力趋势标签进行对比,得到融合算法的第n2个工况标签
[0089]
(1)若且且变化量则获得第n2个回归样本的压力下降工况标签l1;
[0090]
(2)若且或者且或者且或者
且并且变化量或者则获得第n2个回归样本的压力平稳工况标签l2;
[0091]
(3)若且且变化量则获得第n2个回归样本的压力上升工况标签l3;
[0092]
(4)若且或者且且变化量则获得第n2个回归样本的压力波动工况标签l4;
[0093]
(5)若则获得第n2个回归样本的非典型工况标签l5。
[0094]
本实施例中,分别使用随机森林算法构建传统典型工况识别模型,使用弹性bp随机森林融合算法构建融合算法工况识别模型,两种模型的工况识别结果分别如图3a和图3b所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。