1.本发明属于核安全管道振动监测技术领域,具体涉及一种用于核电站系统的基于管道振动监测的控制系统。
背景技术:
2.核电站是我国电力发展中的重要组成部分,核电站在常规岛以及电站配套设施方面的压力管道管理中,必须要做好压力管道的普查以及信息的收集。对压力管道的数量以及具体分布情况进行明确,同时对管道的安全管理情况进行掌握和分析,并建立管道排查和检修的信息文档,同时对检查管理制度进行完善,保证压力静态和动态的参数欠款进行监督以及时预防管道问题,使核电站能够安全、长期运行。
3.现有技术如wo2013157989a1、jp2010133832a、cn103247358b和cn103016958b,现有技术的具体涉及一种用于核电站高能管道介质泄漏的温湿度监测方法和监测系统,该方法在沿高能管壁与保温层之间的传播通道上加装若干个温湿度探头,湿度探头测量介质泄漏后通道内的绝对湿度变化,利用不同探头接收到湿度增加信号的不同时间的相对关系,辨识出泄漏位置;湿度探头记录下湿度增加后,换算出整个通道内总体介质增量,并除以累计所用时间得到泄漏率;通过热工计算,将实际泄漏处的体积泄漏率除以泄漏速率,估算出泄漏源的尺寸;温度探头通过温度升高对管道泄漏情况和泄漏位置进行辅助性判断。但是现有技术的监测不能有效解决核电站的液体运输管道内的堵塞故障进行解决,同时现有技术的监测系统监测效率低不能实现管道内多区域的同步监测进而对核电站的安全性提高的实用性低。本发明将通过对管道在不同状态下进行监测有效监控管道对应区域的故障并通过相应区域的释放对应的单元机器进行所述管道内的清理和疏通并对相应区域管道进行图像将监控获得相应管道故障情况。
4.为了解决本领域普遍存在的监测效率低进而对核电站安全性提高效果不明显;管道内机器设备控制存在缺陷不能有效提高管道故障解决的效率;控制系统智能度低,控制系统各内各工作模块协调度低等等问题,作出了本发明。
技术实现要素:
5.为了克服上述现有技术存在的问题,本发明的目的在于提供一种用于核电站系统的基于管道振动监测的控制系统,具有监测效率高、对核电站安全性提高效果明显、能够有效提高管道故障解决效率的特点。
6.为了实现上述目的,本发明采用的技术方案是:
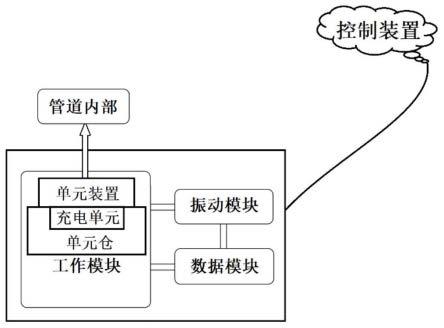
7.一种用于核电站系统的基于管道振动监测的控制系统,包括对管道进行流量监测和对管道内的定向疏通工作的工作模块、对管道的振动进行监测并进一步根据管道内的工作情况进行管道内部异常监测的振动模块、基于物联网进行所述工作模块内的工作反馈的数据收集和处理的数据模块、和对控制系统内的各用电元件分别通过电气连接进一步实现工作控制的控制装置。
8.所述工作模块包括对预定区域的管道进行工作的单元装置、均匀间隔分布于所述管道内并对单元装置进行配合放置的单元仓和实现单元仓对单元装置进行无线匹配式充电的充电单元。
9.所述单元装置包括机体、均匀设置于机体上的移动臂、设置于移动臂上且与管道的内壁的相对设置的移动件1、驱动移动件1相对管道的内壁进行滑动位移的驱动机构、设置于机体上进行管道内流量监控的流量传感器、设置于机体上对管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个移动臂内并进一步驱动移动臂的伸缩运动进而实现移动件1与管道内壁相抵接移动的伸缩驱动单元2和设置于机体内的第一电磁机构。
10.所述单元仓包括均匀分布设置于所述管道上的空腔仓、设置于空腔仓且与管道连通端的第一电磁阀门和均匀分布设置于空腔仓内壁的第二电磁机构。
11.所述充电单元包括设置于单元仓上且与外界连通的供电机构、设置于单元机器的机体上且与所述供电机构进行适配进一步进行单元装置充电工作的无线充电接收端和感应接收端与供电机构适配情况进一步确保有效安全的充电工作的定位装置。
12.所述伸缩驱动单元2包括均匀敷设于每个移动件1并在移动臂的收缩状态下与管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿开口道往管道内壁靠近的电动缸。
13.所述振动模块包括均匀敷设于管道的外管壁进行管道相应区域的振动信号的监测的振动传感器和预先设置于控制系统的储存模块内的管道工作所对应的异常振动范围所对应的第一异常信号和所述管道不进行液体运输过程中所对应管道异常振动所对应的第二异常信号。
14.所述数据模块包括分别设置于每个单元机器和单元仓内具有相应身份编号的信号发送器和设置于核电站服务端内对信号发送器进行信号识别接收的接收器。
15.本发明的有益效果:
16.1.本发明对单元机器进行管道区域的均匀分布设置和对每个单元机器进行相应充电仓的设置实现所述单元机器的高效便捷管理,提高控制系统的控制效率。
17.2.本发明通过管道内相应位置进行单元机器分布进而有效提高核电站内不同管道区域的监控的准确性。
18.3.本发明通过各模块之间的数据信息的反馈接收有效减少本系统的复杂度并进一步实现控制系统的高协调度,为核电站系统的安全控制提供实用性。
19.4.根据单元机器的移动臂在核电站不同型号管道内的自适应伸长进一步实现所述单元机器在不同结构内的管道的适应性移动工作。
附图说明
20.图1为本发明的控制系统的模块化示意图。
21.图2为本发明的单元装置的结构示意图。
22.图3为本发明的处理模块的流程示意图。
23.图4为本发明的单元仓的模块化示意图。
24.图5为本发明的单元装置的实验示意图。
25.附图标号说明:1-移动件;2-伸缩驱动单元;3-移动轨道。
具体实施方式
26.下面结合附图对本发明作进一步详细说明。
27.实施例一:
28.本实施例构造了一种具有对核电站管道进行异物监控和疏通处理的单元装置的控制系统;
29.一种用于核电站系统的基于管道振动监测的控制系统,所述控制系统包括对所述管道进行流量监测和对所述管道内的定向疏通工作的工作模块、对所述管道的振动进行监测并进一步根据所述管道内的工作情况进行所述管道内部异常监测的振动模块、基于物联网进行所述工作模块内的工作反馈的数据收集和处理的数据模块、和对所述控制系统内的各用电元件分别通过电气连接进一步实现工作控制的控制装置,所述工作模块包括对预定区域的所述管道进行工作的单元装置、均匀间隔分布于所述管道内并对所述单元装置进行配合放置的单元仓和实现所述单元仓对所述单元装置进行无线匹配式充电的充电单元,所述单元装置包括机体、均匀设置于所述机体上的移动臂、设置于所述移动臂上且与所述管道的内壁的相对设置的移动件1、驱动所述移动件1相对所述管道的内壁进行滑动位移的驱动机构、设置于所述机体上进行所述管道内流量监控的流量传感器、设置于所述机体上对所述管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个所述移动臂内并进一步驱动所述移动臂的伸缩运动进而实现所述移动件1与所述管道内壁相抵接移动的伸缩驱动单元2和设置于所述机体内的第一电磁机构,所述单元仓包括均匀分布设置于所述管道上的空腔仓、设置于所述空腔仓且与所述管道连通端的第一电磁阀门和均匀分布设置于所述空腔仓内壁的第二电磁机构,所述充电单元包括设置于所述单元仓上且与外界连通的供电机构、设置于所述单元机器的所述机体上且与所述供电机构进行适配进一步进行所述单元装置充电工作的无线充电接收端和感应所述接收端与所述供电机构适配情况进一步确保有效安全的充电工作的定位装置,所述伸缩驱动单元2包括均匀敷设于每个所述移动件1并在所述移动臂的收缩状态下与所述管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于所述机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿所述开口道往管道内壁靠近的电动缸,所述数据模块包括分别设置于每个所述单元机器和单元仓内具有相应身份编号的信号发送器和设置于核电站服务端内对所述信号发送器进行信号识别接收的接收器;
30.所述单元装置包括机体、均匀设置于所述机体上的移动臂、设置于所述移动臂上且与所述管道的内壁的相对设置的移动件1、驱动所述移动件1相对所述管道的内壁进行滑动位移的驱动机构、设置于所述机体上进行所述管道内流量监控的流量传感器、设置于所述机体上对所述管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个所述移动臂内并进一步驱动所述移动臂的伸缩运动进而实现所述移动件1与所述管道内壁相抵接移动的伸缩驱动单元2和设置于所述机体内的第一电磁机构;
31.其中所述伸缩驱动单元2包括均匀敷设于每个所述移动件1并在所述移动臂的收缩状态下与所述管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开
口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于所述机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿所述开口道往管道内壁靠近的电动缸,当移动臂被收缩时,所述移动臂紧贴收缩于所述机体表面进而通过所述机体的移动臂伸缩实现适用于核电站相应的小口径的管道内,进而所述单元装置能能够根据所述移动臂的相应伸缩适用于多种管径形状的管道,适合核电站液体运输管道的特性;
32.每个所述移动件1包括闭合式安装壳和若干滚轮,所述安装壳被设置为其长度方向与所述管道长度方向平行设置,所述滚轮圆心通过转轴活动固定于所述安装壳内,其中每个所述滚轮设置为部分延伸出所述安装壳外且所述滚轮外圆相切于一条直线,所述安装壳内设置驱动所述滚轮同步转动的驱动机构,所述驱动机构包括主动齿轮、被动齿轮、通过固定轴同圆心固定于所述滚轮圆心处的第三齿轮、至少驱动所述主动齿轮进行转动的至少一个驱动电机、张紧配合于所述驱动机构所有所述齿轮上的闭合式齿纹传动带,在相应控制模块控制所述驱动电机驱动所述主动齿轮转动时,所述齿纹传动带对应带动所述第三齿轮进一步带动所述滚轮进行旋转,所述主动齿轮和被动齿轮分别设置于所述传动带两侧的回型端,其中每个所述移动件1包括围绕所述闭合式安装壳外壁以及所述若干滚轮延伸出所述安装壳的滚轮顶端设置的闭合式移动轨道3和配合设置于所述移动轨道3的侧面且封闭所述移动轨道3的内部空间的配合盖体,所述移动轨道3由弹性材料构成,所述移动轨道3与所述安装壳和滚轮围裹接触一端为锯齿,所述滚轮外表设置有与所述锯齿传动配合的纹路,所述安装壳上分布设置有可转动辊轴,所述移动轨道3同时也围裹于所述辊轴上进而在所述滚轮驱动所述移动轨道3进行位移转动时,所述辊轴有效减少所述移动轨道3转动时摩擦阻力,其中所述移动轨道3侧面延伸设置有延伸片,所述配合盖体侧面设置有供所述延伸片滑动配合的凹槽,所述凹槽开口处设置密闭胶层,所述密闭胶层密闭抵接于延伸片和移动轨道3上进而将所述移动件1内部为密封防水结构,且所述移动轨道3与所述管道内壁相对一端均匀设置有金属凸起结构进而有效提高所述移动轨道3与所述管道内壁的摩檫力并且有效提高所述移动轨道3的在液体环境中的防滑度,所述机体内部固定设置有固定架,所述固定架上均匀围绕设置有安装固定所述电动缸其中一端的固定座,所述电动缸另一端固定连接于所述移动臂,所述开口道内设置有橡胶层,所述橡胶层与所述移动臂配合设置,所述移动臂为扁状连接杆,且所述连接杆的扁状面与管道内水流方向平行设置进而减少所述单元机器在管道内的移动阻力,通过伸缩所述电动缸来调节所述移动臂相对所述机体的伸长长度进一步将所述移动件1紧贴到管道内部,所述移动臂与所述机体之间还可转动连接设置有若干铰链轴,进而在所述电动缸驱动所述移动臂时,所述铰链轴提高所述移动臂在所述管道内溶液流动过程中伸长的稳定性,所述机体内可根据实际需求设置作业人员直接观察管道内部情况的同时用于直观地观察所述管道内工作具体情况的相机,所述相机通过密闭设置于所述机体内的玻璃可视窗进行对所述机体所在管道的情况进行拍摄监测,所述机体表面嵌设有若干为所述相机提供光照亮度的led灯,所述led灯的安装数量和安装位置可以根据实际需求由本领域技术人员进行选择,在此不再赘述,其中每个所述移动臂相应连接设置一个所述电动缸,所述机体至少两个不同横截面区域均匀围绕设置有所述电动缸和与所述电动缸另一端连接固定的移动臂;
33.所述机体可进一步包括对所述管道内的沉积异物进行分散处理的旋转机构,所述
旋转机构通过对沉淀物的旋转分散进一步刮掉所述管道内堵塞异物,及时有效解决所述核电站的冷凝管的堵塞造成核反应对的温度过高,所述旋转机构包括分别设置于所述机体移动方向的至少一端的旋转单元,其中每个所述旋转单元包括设置于所述机体内部的旋转电机、嵌设于所述机体表面的密封轴承、旋转轴、通过焊接围绕固定于所述旋转轴上的蛟龙叶片、和均匀围绕设置于所述密封轴承附近的分散片,所述分散片长度方向其中一端通过螺栓和/或焊接固定于所述机体上且所述分散片边沿为尖状结构的金属片,进而在所述蛟龙叶片对沉淀物进行预先搅拌分散处理进一步所述分散片对流动的所述沉淀物进阻拦分散成不易沉积的小颗粒,避免所述沉积物由所述蛟龙叶片初步旋转分散不充分形成较大颗粒沉积物并随所述溶液流动后进一步形成沉积,其中所述分散片的具体数量由本领域技术人员根据实际需求进行选择,在此不再赘述。
34.实施例二:
35.本实施例构造了一种实现对单元装置进行电量监控和及时电源补充实现自动化蓄电的控制系统;
36.一种用于核电站系统的基于管道振动监测的控制系统,所述控制系统包括对所述管道进行流量监测和对所述管道内的定向疏通工作的工作模块、对所述管道的振动进行监测并进一步根据所述管道内的工作情况进行所述管道内部异常监测的振动模块、基于物联网进行所述工作模块内的工作反馈的数据收集和处理的数据模块、和对所述控制系统内的各用电元件分别通过电气连接进一步实现工作控制的控制装置,所述工作模块包括对预定区域的所述管道进行工作的单元装置、均匀间隔分布于所述管道内并对所述单元装置进行配合放置的单元仓和实现所述单元仓对所述单元装置进行无线匹配式充电的充电单元,所述单元装置包括机体、均匀设置于所述机体上的移动臂、设置于所述移动臂上且与所述管道的内壁的相对设置的移动件1、驱动所述移动件1相对所述管道的内壁进行滑动位移的驱动机构、设置于所述机体上进行所述管道内流量监控的流量传感器、设置于所述机体上对所述管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个所述移动臂内并进一步驱动所述移动臂的伸缩运动进而实现所述移动件1与所述管道内壁相抵接移动的伸缩驱动单元2和设置于所述机体内的第一电磁机构,所述单元仓包括均匀分布设置于所述管道上的空腔仓、设置于所述空腔仓且与所述管道连通端的第一电磁阀门和均匀分布设置于所述空腔仓内壁的第二电磁机构,所述充电单元包括设置于所述单元仓上且与外界连通的供电机构、设置于所述单元机器的所述机体上且与所述供电机构进行适配进一步进行所述单元装置充电工作的无线充电接收端和感应所述接收端与所述供电机构适配情况进一步确保有效安全的充电工作的定位装置,所述伸缩驱动单元2包括均匀敷设于每个所述移动件1并在所述移动臂的收缩状态下与所述管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于所述机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿所述开口道往管道内壁靠近的电动缸,所述数据模块包括分别设置于每个所述单元机器和单元仓内具有相应身份编号的信号发送器和设置于核电站服务端内对所述信号发送器进行信号识别接收的接收器;
37.所述单元装置包括机体、均匀设置于所述机体上的移动臂、设置于所述移动臂上且与所述管道的内壁的相对设置的移动件1、驱动所述移动件1相对所述管道的内壁进行滑
动位移的驱动机构、设置于所述机体上进行所述管道内流量监控的流量传感器、设置于所述机体上对所述管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个所述移动臂内并进一步驱动所述移动臂的伸缩运动进而实现所述移动件1与所述管道内壁相抵接移动的伸缩驱动单元2和设置于所述机体内的第一电磁机构;
38.其中所述伸缩驱动单元2包括均匀敷设于每个所述移动件1并在所述移动臂的收缩状态下与所述管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于所述机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿所述开口道往管道内壁靠近的电动缸,当移动臂被收缩时,所述移动臂紧贴收缩于所述机体表面进而通过所述机体的移动臂伸缩实现适用于核电站相应的小口径的管道内,进而所述单元装置能能够根据所述移动臂的相应伸缩适用于多种管径形状的管道,适合核电站液体运输管道的特性;
39.每个所述移动件1包括闭合式安装壳和若干滚轮,所述安装壳被设置为其长度方向与所述管道长度方向平行设置,所述滚轮圆心通过转轴活动固定于所述安装壳内,其中每个所述滚轮设置为部分延伸出所述安装壳外且所述滚轮外圆相切于一条直线,所述安装壳内设置驱动所述滚轮同步转动的驱动机构,所述驱动机构包括主动齿轮、被动齿轮、通过固定轴同圆心固定于所述滚轮圆心处的第三齿轮、至少驱动所述主动齿轮进行转动的至少一个驱动电机、张紧配合于所述驱动机构所有所述齿轮上的闭合式齿纹传动带,在相应控制模块控制所述驱动电机驱动所述主动齿轮转动时,所述齿纹传动带对应带动所述第三齿轮进一步带动所述滚轮进行旋转,所述主动齿轮和被动齿轮分别设置于所述传动带两侧的回型端,其中每个所述移动件1包括围绕所述闭合式安装壳外壁以及所述若干滚轮延伸出所述安装壳的滚轮顶端设置的闭合式移动轨道3和配合设置于所述移动轨道3的侧面且封闭所述移动轨道3的内部空间的配合盖体,所述移动轨道3由弹性材料构成,所述移动轨道3与所述安装壳和滚轮围裹接触一端为锯齿,所述滚轮外表设置有与所述锯齿传动配合的纹路,所述安装壳上分布设置有可转动辊轴,所述移动轨道3同时也围裹于所述辊轴上进而在所述滚轮驱动所述移动轨道3进行位移转动时,所述辊轴有效减少所述移动轨道3转动时摩擦阻力,其中所述移动轨道3侧面延伸设置有延伸片,所述配合盖体侧面设置有供所述延伸片滑动配合的凹槽,所述凹槽开口处设置密闭胶层,所述密闭胶层密闭抵接于延伸片和移动轨道3上进而将所述移动件1内部为密封防水结构,且所述移动轨道3与所述管道内壁相对一端均匀设置有金属凸起结构进而有效提高所述移动轨道3与所述管道内壁的摩檫力并且有效提高所述移动轨道3的在液体环境中的防滑度,所述机体内部固定设置有固定架,所述固定架上均匀围绕设置有安装固定所述电动缸其中一端的固定座,所述电动缸另一端固定连接于所述移动臂,所述开口道内设置有橡胶层,所述橡胶层与所述移动臂配合设置,所述移动臂为扁状连接杆,且所述连接杆的扁状面与管道内水流方向平行设置进而减少所述单元机器在管道内的移动阻力,通过伸缩所述电动缸来调节所述移动臂相对所述机体的伸长长度进一步将所述移动件1紧贴到管道内部,所述移动臂与所述机体之间还可转动连接设置有若干铰链轴,进而在所述电动缸驱动所述移动臂时,所述铰链轴提高所述移动臂在所述管道内溶液流动过程中伸长的稳定性,所述机体内可根据实际需求设置作业人员直接观察管道内部情况的同时用于直观地观察所述管道内工作具体情况的相机,所述相机通过
密闭设置于所述机体内的玻璃可视窗进行对所述机体所在管道的情况进行拍摄监测,所述机体表面嵌设有若干为所述相机提供光照亮度的led灯,所述led灯的安装数量和安装位置可以根据实际需求由本领域技术人员进行选择,在此不再赘述,其中每个所述移动臂相应连接设置一个所述电动缸,所述机体至少两个不同横截面区域均匀围绕设置有所述电动缸和与所述电动缸另一端连接固定的移动臂;
40.所述机体可进一步包括对所述管道内的沉积异物进行分散处理的旋转机构,所述旋转机构通过对沉淀物的旋转分散进一步刮掉所述管道内堵塞异物,及时有效解决所述核电站的冷凝管的堵塞造成核反应对的温度过高,所述旋转机构包括分别设置于所述机体移动方向的至少一端的旋转单元,其中每个所述旋转单元包括设置于所述机体内部的旋转电机、嵌设于所述机体表面的密封轴承、旋转轴、通过焊接围绕固定于所述旋转轴上的蛟龙叶片、和均匀围绕设置于所述密封轴承附近的分散片,所述分散片长度方向其中一端通过螺栓和/或焊接固定于所述机体上且所述分散片边沿为尖状结构的金属片,进而在所述蛟龙叶片对沉淀物进行预先搅拌分散处理进一步所述分散片对流动的所述沉淀物进阻拦分散成不易沉积的小颗粒,避免所述沉积物由所述蛟龙叶片初步旋转分散不充分形成较大颗粒沉积物并随所述溶液流动后进一步形成沉积,其中所述分散片的具体数量由本领域技术人员根据实际需求进行选择,在此不再赘述;
41.所述机体包括电源装置、定位模块和控制模块,其中所述电源装置和定位模块分别与所述控制模块相连接,所述控制模块接收所述机体内相应装置的数据信息并进一步进行分析处理,所述单元装置的所述机体上的电源装置可以对所述机体进行供电处理,所述数据模块使得所述机体能够跟供电机构进行通信处理,所述定位模块可以定位所述机体所处的位置进而使得所述机体能够根据当前所处的位置进一步规划返回所述单元仓进行储放和充电的路线,所述驱动机构为所述机体在所述管道内部的行动提供动力,所述控制模块可以根据实际需求由本领域技术人员选择微处理器、微控制器、传感器、模拟集成电路等等,在此不作限制,所述单元仓内设置有红外传感器、电磁传感器、充电机构和主控模块,所述红外传感器和电磁传感器分别与主控模块相连接,所述驱动机构的控制输入端与所述控制模块相连接,所述电磁传感器用于所述充电机构与所述机体上的电源装置的对准,所述机体完全进入所述单元仓进一步遮挡所述红外传感器发出的红外线,所述主控模块就会控制所述第一电磁阀门进行关闭进而将所述机体相应储放于所述单元仓内,所述电磁传感器设置于所述充电机构上用于将所述充电机构与所述机体上的无线充电线接收端的对准识别,所述主控模块为现有技术的微控制器,其中所述第一电磁阀门为现有技术的电控制活动闭合门装置,在此不再赘述;
42.所述单元装置和所述单元仓之间通过所述数据模块通讯连接,当所述单元装置的控制模块接收到所述电源装置电量过低的信号时,所述主控模块接收定位模块当前的数据信息,再将所述数据信息与供电机构的位置进行分析进一步生成相应位移驱动信号至所述驱动机构使得所述机体移动至所述空腔仓的第一电磁阀门附近并进一步由所述第一电磁机构和第二电磁机构进行配合工作实现将所述单元装置吸附至所述单元仓内,进一步所述控制模块根据所述定位模块的信息驱动所述驱动机构到达所述单元仓相对的所述管道区域,在所述单元装置的驱动机构完成位移驱动时,与所述机体匹配充电所对应的单元仓所对应的第一电磁阀门开启,进一步通过所述机体上的第一电磁机构和所述单元仓的第二电
磁机构的相互配合下实现所述单元装置转移至所述单元仓内,进一步所述机体到达供电机构所处的区域的预定距离处而遮挡红外传感器发出的红外线,并在所述充电机构上的电磁传感器进一步检测到所述机体上的无线充电线接收端对准时,所述充电机构与无线充电线接收端对接并且所述主控模块控制所述充电机构与外界电源电路连通实现所述单元仓对所述单元装置的对接充电,当充电完成后,所述主控模块控制所述充电机构与外接电源断开,所述单元装置根据所述振动模块检测的信号进一步转移至所述管道内进行疏通,在所述单元仓的所述主控模块和所述单元机构的控制模块接收所述控制装置发送的工作信号,所述第一电磁阀门被所述主控模块控制开启,进一步所述第一电磁机构和第二电磁机构被对应驱动为相对端产生相同电极,进一步实现将所述机体转移至所述管道内进行工作,通过这样的方式实现了所述单元装置的充电过程的自动化;
43.所述充电单元包括设置于所述单元仓上且与外界连通的供电机构、设置于所述单元机器的所述机体上且与所述供电机构进行适配连接的无线充电线接收端,所述电磁传感器被设置监测所述单元装置充电工作的无线充电接收端和感应所述接收端位置适配情况进一步确保有效安全的充电工作,所述电源装置包括电量检测模块和用于对所述机体进行供电的电源模块,其中所述电源模块分别与电量检测模块和所述无线充电接收端相连接,所述电量检测模块和所述无线充电接收端分别与所述控制模块相连接,所述电量检测模块用于对电源模块进行电量的检测,所述无线充电接收端用于对所述电源模块进行充电处理,所述定位模块为现有技术的gps定位模块,所述gps定位模块用于对所述机体所处位置的定位,其中所述空腔仓还包括所述供电机构外壳,所述充电机构设置于所述供电机构外壳的内部,当所述机体进入充电区域时,通过所述第一电磁机构和第二电磁机构的配合设置进一步实现所述机体与所述单元仓内的充电机构的相应对位配合,其中所述充电机构为无线电源发射线圈,所述无线充电接收端为与所述无线电源发射线圈线进行电源匹配传输的无线电源接收圈,其中所述供电机构外壳为闭合密封结构,所述无线充电接收端包括接收线圈、接收谐振单元和整流单元,所述控制模块分别控制所述接收谐振单元以及整流单元,所述机体内嵌设置有具有容量空间的密闭空腔,所述接收线圈、所述控制模块、接收谐振单元以及整流单元设置于所述机体内的密闭空腔内,所述密闭空腔与所述机体外界独立密闭设置,所述接收谐振单元的一端与所述接收线圈的一端电连接,所述接收谐振单元的另一端与所述整流单元的一端电连接,所述整流单元的另一端与所述电源模块通过防水导线电连接,所述整流单元用于将从所述接收谐振单元传递来的交流电变为直流电并输送至所述电源装置;
44.所述充电机构包括固定于所述单元仓且与所述单元仓外界密闭隔离设置的壳体、发射线圈、整流滤波电路、逆变电路、发射谐振单元、补偿网络以及供电电源,其中所述补偿网络的作用是对发射谐振单元的电路相应的耦合电容与电感之间形成的谐振进行调谐以提高电流传输的功率和效率,所述补偿网络采用电压串联谐振补偿结构或电流并联谐振补偿结构中的至少一种,所述整流滤波电路接收所述供电电源的电流并将交流电转换为直流电,所述逆变电路进一步将所述直流电逆变为高频交流电然后经所述发射谐振单元进行升压操作变为高频高压的交流电再经所述补偿网络后施加至所述发射线圈上,其中所述主控模块分别通过电气连接并进一步控制所述整流滤波电路、逆变电路、发射谐振单元以及补偿网络的工作,其中至少所述整流滤波电路、逆变电路、发射谐振单元和补偿网络设置于所
述壳体内,所述主控模块与所述控制模块彼此之间可进行通讯传递,所述发射线圈与第二电磁机构设置于所述壳体的一侧,所述壳体为表面密闭包裹有绝缘防水的非金属壳体,所述主控模块与所述控制模块通过所述数据模块进而实现通过无线信号进行互相通信传递,所述供电电源为所述管道外接电源;
45.当所述控制模块监控到电源装置电量不足时进一步驱动所述单元装置位移至所述单元仓的第一电磁阀门处,所述主控模块接收到无线充电请求信号后,控制所述第二电磁机构的电源连通,同时启动所述电磁传感器发出电磁信号判定机体的接收线圈的具体位置与所述发射线圈对应匹配时,进一步所述主控模块控制整流滤波电路、逆变电路、发射谐振单元、补偿网络以及供电电源进行无线充电作业,当所述控制模块检测到所述电源装置电量充满后进一步发送无线充电完成信号给所述主控模块,所述主控模块和控制模块进一步分别控制所述第一电磁机构和第二电磁机构相应电流方向的连通进一步使所述第一电磁机构和第二电磁机构相对端为相同电极,本发明采用所述第一电磁机构和第二电磁机构的配合吸引或排斥进行以及所述电磁传感器的再次定位的模式,大大增强了管道内溶液条件下的无线充电的可操作性,提高了水管内的单元装置无线充电的效率,其中所述第一电磁线圈为内嵌设置于所述机体内且靠近与所述单元仓相对端的若干电磁铁,所述第二电磁线圈为内嵌设置于所述单元仓内且与所述电磁阀门相对设置同时与所述第一电磁圈对应配合的若干电磁铁,所述第一电磁机构与所述电源模块电连接,所述第二电磁机构连接所述主控模块与所述供电电源,其中所述主控模块控制进入所述第二电磁圈的电流方向进一步控制所述第一电磁机构与所述第二电磁机构之间的相互作用力实现所述机体进入和/或转移出所述单元仓。
46.实施例三:
47.本实施例构造了一种对管道内进行监测的各单元装置进行工作信号收集的进一步数据收集和处理的控制系统;
48.一种用于核电站系统的基于管道振动监测的控制系统,所述控制系统包括对所述管道进行流量监测和对所述管道内的定向疏通工作的工作模块、对所述管道的振动进行监测并进一步根据所述管道内的工作情况进行所述管道内部异常监测的振动模块、基于物联网进行所述工作模块内的工作反馈的数据收集和处理的数据模块、和对所述控制系统内的各用电元件分别通过电气连接进一步实现工作控制的控制装置,所述工作模块包括对预定区域的所述管道进行工作的单元装置、均匀间隔分布于所述管道内并对所述单元装置进行配合放置的单元仓和实现所述单元仓对所述单元装置进行无线匹配式充电的充电单元,所述单元装置包括机体、均匀设置于所述机体上的移动臂、设置于所述移动臂上且与所述管道的内壁的相对设置的移动件1、驱动所述移动件1相对所述管道的内壁进行滑动位移的驱动机构、设置于所述机体上进行所述管道内流量监控的流量传感器、设置于所述机体上对所述管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个所述移动臂内并进一步驱动所述移动臂的伸缩运动进而实现所述移动件1与所述管道内壁相抵接移动的伸缩驱动单元2和设置于所述机体内的第一电磁机构,所述单元仓包括均匀分布设置于所述管道上的空腔仓、设置于所述空腔仓且与所述管道连通端的第一电磁阀门和均匀分布设置于所述空腔仓内壁的第二电磁机构,所述充电单元包括设置于所述单元仓上且与外界连通的供电机构、设置于所述单元机器的所述机体上且与所述供电机构进行适配进一步进行所述单元装
置充电工作的无线充电接收端和感应所述接收端与所述供电机构适配情况进一步确保有效安全的充电工作的定位装置,所述伸缩驱动单元2包括均匀敷设于每个所述移动件1并在所述移动臂的收缩状态下与所述管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于所述机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿所述开口道往管道内壁靠近的电动缸,所述振动模块包括均匀敷设于所述管道的外管壁进行所述管道相应区域的振动信号的监测的振动传感器和预先设置于所述控制系统的储存模块内的所述管道工作所对应的异常振动范围所对应的第一异常信号和所述管道不进行液体运输过程中所对应管道异常振动所对应的第二异常信号,所述数据模块包括分别设置于每个所述单元机器和单元仓内具有相应身份编号的信号发送器和设置于核电站服务端内对所述信号发送器进行信号识别接收的接收器;
49.所述单元装置包括机体、均匀设置于所述机体上的移动臂、设置于所述移动臂上且与所述管道的内壁的相对设置的移动件1、驱动所述移动件1相对所述管道的内壁进行滑动位移的驱动机构、设置于所述机体上进行所述管道内流量监控的流量传感器、设置于所述机体上对所述管道内的沉淀杂物进行搅拌分散的旋转机构、设置于每个所述移动臂内并进一步驱动所述移动臂的伸缩运动进而实现所述移动件1与所述管道内壁相抵接移动的伸缩驱动单元2和设置于所述机体内的第一电磁机构;
50.其中所述伸缩驱动单元2包括均匀敷设于每个所述移动件1并在所述移动臂的收缩状态下与所述管道内壁相对设置的压力传感器、分布设置于所述机体外壳的至少三个开口道、分别依次贯穿所述开口道并其中一端固定于所述机体内部的至少三伸长杆和设置于所述机体内且驱动所述伸长杆其中一端进一步使所述伸长杆的另一端沿所述开口道往管道内壁靠近的电动缸,当移动臂被收缩时,所述移动臂紧贴收缩于所述机体表面进而通过所述机体的移动臂伸缩实现适用于核电站相应的小口径的管道内,进而所述单元装置能能够根据所述移动臂的相应伸缩适用于多种管径形状的管道,适合核电站液体运输管道的特性;
51.每个所述移动件1包括闭合式安装壳和若干滚轮,所述安装壳被设置为其长度方向与所述管道长度方向平行设置,所述滚轮圆心通过转轴活动固定于所述安装壳内,其中每个所述滚轮设置为部分延伸出所述安装壳外且所述滚轮外圆相切于一条直线,所述安装壳内设置驱动所述滚轮同步转动的驱动机构,所述驱动机构包括主动齿轮、被动齿轮、通过固定轴同圆心固定于所述滚轮圆心处的第三齿轮、至少驱动所述主动齿轮进行转动的至少一个驱动电机、张紧配合于所述驱动机构所有所述齿轮上的闭合式齿纹传动带,在相应控制模块控制所述驱动电机驱动所述主动齿轮转动时,所述齿纹传动带对应带动所述第三齿轮进一步带动所述滚轮进行旋转,所述主动齿轮和被动齿轮分别设置于所述传动带两侧的回型端,其中每个所述移动件1包括围绕所述闭合式安装壳外壁以及所述若干滚轮延伸出所述安装壳的滚轮顶端设置的闭合式移动轨道3和配合设置于所述移动轨道3的侧面且封闭所述移动轨道3的内部空间的配合盖体,所述移动轨道3由弹性材料构成,所述移动轨道3与所述安装壳和滚轮围裹接触一端为锯齿,所述滚轮外表设置有与所述锯齿传动配合的纹路,所述安装壳上分布设置有可转动辊轴,所述移动轨道3同时也围裹于所述辊轴上进而在所述滚轮驱动所述移动轨道3进行位移转动时,所述辊轴有效减少所述移动轨道3转动时摩
擦阻力,其中所述移动轨道3侧面延伸设置有延伸片,所述配合盖体侧面设置有供所述延伸片滑动配合的凹槽,所述凹槽开口处设置密闭胶层,所述密闭胶层密闭抵接于延伸片和移动轨道3上进而将所述移动件1内部为密封防水结构,且所述移动轨道3与所述管道内壁相对一端均匀设置有金属凸起结构进而有效提高所述移动轨道3与所述管道内壁的摩檫力并且有效提高所述移动轨道3的在液体环境中的防滑度,所述机体内部固定设置有固定架,所述固定架上均匀围绕设置有安装固定所述电动缸其中一端的固定座,所述电动缸另一端固定连接于所述移动臂,所述开口道内设置有橡胶层,所述橡胶层与所述移动臂配合设置,所述移动臂为扁状连接杆,且所述连接杆的扁状面与管道内水流方向平行设置进而减少所述单元机器在管道内的移动阻力,通过伸缩所述电动缸来调节所述移动臂相对所述机体的伸长长度进一步将所述移动件1紧贴到管道内部,所述移动臂与所述机体之间还可转动连接设置有若干铰链轴,进而在所述电动缸驱动所述移动臂时,所述铰链轴提高所述移动臂在所述管道内溶液流动过程中伸长的稳定性,所述机体内可根据实际需求设置作业人员直接观察管道内部情况的同时用于直观地观察所述管道内工作具体情况的相机,所述相机通过密闭设置于所述机体内的玻璃可视窗进行对所述机体所在管道的情况进行拍摄监测,所述机体表面嵌设有若干为所述相机提供光照亮度的led灯,所述led灯的安装数量和安装位置可以根据实际需求由本领域技术人员进行选择,在此不再赘述,其中每个所述移动臂相应连接设置一个所述电动缸,所述机体至少两个不同横截面区域均匀围绕设置有所述电动缸和与所述电动缸另一端连接固定的移动臂;
52.所述机体可进一步包括对所述管道内的沉积异物进行分散处理的旋转机构,所述旋转机构通过对沉淀物的旋转分散进一步刮掉所述管道内堵塞异物,及时有效解决所述核电站的冷凝管的堵塞造成核反应对的温度过高,所述旋转机构包括分别设置于所述机体移动方向的至少一端的旋转单元,其中每个所述旋转单元包括设置于所述机体内部的旋转电机、嵌设于所述机体表面的密封轴承、旋转轴、通过焊接围绕固定于所述旋转轴上的蛟龙叶片、和均匀围绕设置于所述密封轴承附近的分散片,所述分散片长度方向其中一端通过螺栓和/或焊接固定于所述机体上且所述分散片边沿为尖状结构的金属片,进而在所述蛟龙叶片对沉淀物进行预先搅拌分散处理进一步所述分散片对流动的所述沉淀物进阻拦分散成不易沉积的小颗粒,避免所述沉积物由所述蛟龙叶片初步旋转分散不充分形成较大颗粒沉积物并随所述溶液流动后进一步形成沉积,其中所述分散片的具体数量由本领域技术人员根据实际需求进行选择,在此不再赘述;
53.所述机体包括电源装置、定位模块和控制模块,其中所述电源装置和定位模块分别与所述控制模块相连接,所述控制模块接收所述机体内相应装置的数据信息并进一步进行分析处理,所述单元装置的所述机体上的电源装置可以对所述机体进行供电处理,所述数据模块使得所述机体能够跟供电机构进行通信处理,所述定位模块可以定位所述机体所处的位置进而使得所述机体能够根据当前所处的位置进一步规划返回所述单元仓进行储放和充电的路线,所述驱动机构为所述机体在所述管道内部的行动提供动力,所述控制模块可以根据实际需求由本领域技术人员选择微处理器、微控制器、传感器、模拟集成电路等等,在此不作限制,所述单元仓内设置有红外传感器、电磁传感器、充电机构和主控模块,所述红外传感器和电磁传感器分别与主控模块相连接,所述驱动机构的控制输入端与所述控制模块相连接,所述电磁传感器用于所述充电机构与所述机体上的电源装置的对准,所述
机体完全进入所述单元仓进一步遮挡所述红外传感器发出的红外线,所述主控模块就会控制所述第一电磁阀门进行关闭进而将所述机体相应储放于所述单元仓内,所述电磁传感器设置于所述充电机构上用于将所述充电机构与所述机体上的无线充电线接收端的对准识别,所述主控模块为现有技术的微控制器,其中所述第一电磁阀门为现有技术的电控制活动闭合门装置,在此不再赘述;
54.所述单元装置和所述单元仓之间通过所述数据模块通讯连接,当所述单元装置的控制模块接收到所述电源装置电量过低的信号时,所述主控模块接收定位模块当前的数据信息,再将所述数据信息与供电机构的位置进行分析进一步生成相应位移驱动信号至所述驱动机构使得所述机体移动至所述空腔仓的第一电磁阀门附近并进一步由所述第一电磁机构和第二电磁机构进行配合工作实现将所述单元装置吸附至所述单元仓内,进一步所述控制模块根据所述定位模块的信息驱动所述驱动机构到达所述单元仓相对的所述管道区域,在所述单元装置的驱动机构完成位移驱动时,与所述机体匹配充电所对应的单元仓所对应的第一电磁阀门开启,进一步通过所述机体上的第一电磁机构和所述单元仓的第二电磁机构的相互配合下实现所述单元装置转移至所述单元仓内,进一步所述机体到达供电机构所处的区域的预定距离处而遮挡红外传感器发出的红外线,并在所述充电机构上的电磁传感器进一步检测到所述机体上的无线充电线接收端对准时,所述充电机构与无线充电线接收端对接并且所述主控模块控制所述充电机构与外界电源电路连通实现所述单元仓对所述单元装置的对接充电,当充电完成后,所述主控模块控制所述充电机构与外接电源断开,所述单元装置根据所述振动模块检测的信号进一步转移至所述管道内进行疏通,在所述单元仓的所述主控模块和所述单元机构的控制模块接收所述控制装置发送的工作信号,所述第一电磁阀门被所述主控模块控制开启,进一步所述第一电磁机构和第二电磁机构被对应驱动为相对端产生相同电极,进一步实现将所述机体转移至所述管道内进行工作,通过这样的方式实现了所述单元装置的充电过程的自动化;
55.所述充电单元包括设置于所述单元仓上且与外界连通的供电机构、设置于所述单元机器的所述机体上且与所述供电机构进行适配连接的无线充电线接收端,所述电磁传感器被设置监测所述单元装置充电工作的无线充电接收端和感应所述接收端位置适配情况进一步确保有效安全的充电工作,所述电源装置包括电量检测模块和用于对所述机体进行供电的电源模块,其中所述电源模块分别与电量检测模块和所述无线充电接收端相连接,所述电量检测模块和所述无线充电接收端分别与所述控制模块相连接,所述电量检测模块用于对电源模块进行电量的检测,所述无线充电接收端用于对所述电源模块进行充电处理,所述定位模块为现有技术的gps定位模块,所述gps定位模块用于对所述机体所处位置的定位,其中所述空腔仓还包括所述供电机构外壳,所述充电机构设置于所述供电机构外壳的内部,当所述机体进入充电区域时,通过所述第一电磁机构和第二电磁机构的配合设置进一步实现所述机体与所述单元仓内的充电机构的相应对位配合,其中所述充电机构为无线电源发射线圈,所述无线充电接收端为与所述无线电源发射线圈线进行电源匹配传输的无线电源接收圈,其中所述供电机构外壳为闭合密封结构,所述无线充电接收端包括接收线圈、接收谐振单元和整流单元,所述控制模块分别控制所述接收谐振单元以及整流单元,所述机体内嵌设置有具有容量空间的密闭空腔,所述接收线圈、所述控制模块、接收谐振单元以及整流单元设置于所述机体内的密闭空腔内,所述密闭空腔与所述机体外界独立
密闭设置,所述接收谐振单元的一端与所述接收线圈的一端电连接,所述接收谐振单元的另一端与所述整流单元的一端电连接,所述整流单元的另一端与所述电源模块通过防水导线电连接,所述整流单元用于将从所述接收谐振单元传递来的交流电变为直流电并输送至所述电源装置;
56.所述充电机构包括固定于所述单元仓且与所述单元仓外界密闭隔离设置的壳体、发射线圈、整流滤波电路、逆变电路、发射谐振单元、补偿网络以及供电电源,其中所述补偿网络的作用是对发射谐振单元的电路相应的耦合电容与电感之间形成的谐振进行调谐以提高电流传输的功率和效率,所述补偿网络采用电压串联谐振补偿结构或电流并联谐振补偿结构中的至少一种,所述整流滤波电路接收所述供电电源的电流并将交流电转换为直流电,所述逆变电路进一步将所述直流电逆变为高频交流电然后经所述发射谐振单元进行升压操作变为高频高压的交流电再经所述补偿网络后施加至所述发射线圈上,其中所述主控模块分别通过电气连接并进一步控制所述整流滤波电路、逆变电路、发射谐振单元以及补偿网络的工作,其中至少所述整流滤波电路、逆变电路、发射谐振单元和补偿网络设置于所述壳体内,所述主控模块与所述控制模块彼此之间可进行通讯传递,所述发射线圈与第二电磁机构设置于所述壳体的一侧,所述壳体为表面密闭包裹有绝缘防水的非金属壳体,所述主控模块与所述控制模块通过所述数据模块进而实现通过无线信号进行互相通信传递,所述供电电源为所述管道外接电源;
57.当所述控制模块监控到电源装置电量不足时进一步驱动所述单元装置位移至所述单元仓的第一电磁阀门处,所述主控模块接收到无线充电请求信号后,控制所述第二电磁机构的电源连通,同时启动所述电磁传感器发出电磁信号判定机体的接收线圈的具体位置与所述发射线圈对应匹配时,进一步所述主控模块控制整流滤波电路、逆变电路、发射谐振单元、补偿网络以及供电电源进行无线充电作业,当所述控制模块检测到所述电源装置电量充满后进一步发送无线充电完成信号给所述主控模块,所述主控模块和控制模块进一步分别控制所述第一电磁机构和第二电磁机构相应电流方向的连通进一步使所述第一电磁机构和第二电磁机构相对端为相同电极,本发明采用所述第一电磁机构和第二电磁机构的配合吸引或排斥进行以及所述电磁传感器的再次定位的模式,大大增强了管道内溶液条件下的无线充电的可操作性,提高了水管内的单元装置无线充电的效率,其中所述第一电磁线圈为内嵌设置于所述机体内且靠近与所述单元仓相对端的若干电磁铁,所述第二电磁线圈为内嵌设置于所述单元仓内且与所述电磁阀门相对设置同时与所述第一电磁圈对应配合的若干电磁铁,所述第一电磁机构与所述电源模块电连接,所述第二电磁机构连接所述主控模块与所述供电电源,其中所述主控模块控制进入所述第二电磁圈的电流方向进一步控制所述第一电磁机构与所述第二电磁机构之间的相互作用力实现所述机体进入和/或转移出所述单元仓;
58.所述振动模块包括均匀敷设于所述管道的外管壁进行所述管道相应区域的振动信号的监测的振动传感器和预先设置于所述控制系统的储存模块内所述管道工作所对应的异常振动范围所对应的第一异常信号、所述管道不进行液体运输过程中所对应管道异常振动所对应的第二异常信号和对所述振动传感器所检测信息数据进行分析处理的处理模块,所述数据模块包括分别设置于每个所述单元机器和单元仓内具有相应身份编号的信号发送器和设置于核电站服务端内对所述信号发送器进行信号识别接收的接收器;
59.所述管道外表面以预定距离间隔设置有对所述管道的振动信息进行监测的振动传感器,所述振动传感器的感应端与所述管道表面接触,所述振动传感器用于感应所述管道各工作状态下对应的振动信号,所述振动传感器通过所述数据模块与所述控制装置通讯连接,所述数据模块还包括设置于所述控制装置内的无线通讯器,所述控制装置通过所述无线通讯器发送信息到所述核电站监测工作人员的移动通讯设备,控制装置实时接收各管道位置的振动传感器的监测数据,每个振动传感器由本领域技术人员预先设置有与其所在位置信息进行绑定的编号,且所述振动传感器感应到所述管道的振动强度的大小;
60.所述处理模块包括处理方法:步骤1:根据预先设定时长为一个检测周期,以所述振动传感器每个周期内对应的数据信息为单位分别进行收集处理;步骤2:将一个周期内所采集到的管道瞬态信号划单独进行分析;步骤3:运用离散傅立叶变换分解得到一系列谐波分量,并计算各谐波分量的幅值;步骤4:计算出管道在相同工作状态下瞬态信号各谐波分量在所有周期内的幅值;步骤5:计算所有谐波分量的衰减率;步骤6:通过分析不同谐波分量之间衰减率的不同,对管道进行故障检测和定位;
61.所述振动传感器安装在所述管道的内壁上,测量所述管道运行情况并通过所述数据模块传输到核电站服务端,所述服务端结合数据库存储的故障状态评估模块进行管道程度评估,所述数据库预先储存设置有所述振动传感器对应检测的管道区域在传输工作过程中经本邻域技术人员大量重复实验获得的异常振动时对应的谐波分量之间衰减率即所述第一异常信号、所述管道不进行液体运输过程中所述振动传感器对应检测的管道区域内在传输工作过程中经本邻域技术人员大量重复实验获得的异常振动时对应的谐波分量之间衰减率即所述第二异常信号;
62.本发明通过控制系统通过对所述核电站内管道系统进行单元检测区域划分对应相应单元装置进行分别检测,进而提高所述核电站管道系统的系统监测管理化,同时所述单元装置通过移动臂的伸缩实现在不同管径的管道中的移动工作,有效提高对核电站管道振动监测的准确性和效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。