1.本发明涉及采油领域,具体是通过采油机的地面示功图定位采油机的凡尔开闭点,从而监测采油机井供液能力的方法。
背景技术:
2.我国大部分油田属于低渗透油田,其丰度低、渗透率低、单井产能低,导致目前采油机的抽油能力与油井底层供液能力难以精准匹配,采油机泵效低,耗电量大,抽油成本高。企业需要对采油机井的供液能力实时分析并制定冲次调节策略,实现采油机抽油能力与油井供液能力的准确匹配,达到节能增产的目的。
3.在采油过程中,传统上企业常采用动液面来衡量油井的供液能力,但动液面的测量成本较高且在动液面深度较深或受气体影响时测量结果并不准确。随着示功图测试技术的不断进步,目前企业多凭借人工经验从示功图中定位凡尔开闭点并据此计算油井的供液能力。该方法虽弥补了传统方法的不足,但仍存在实时性差和人工成本高等问题。
4.近年来,人工智能技术的发展为油井供液能力的定量化分析提供了技术支撑。卷积神经网络回归模型可用于关键点的回归任务,这为从示功图中定位采油机的凡尔开闭点提供了可能。但前期研究表明,如果简单地将卷积神经网络应用于示功图凡尔开闭点识别这种细粒度、高精度任务上,极易导致网络模型存在精度和空间泛化能力上的不足。如本公司在先申请(cn202110927362.5一种抽油机有效冲程的计算方法),给出了一种抽油机有效冲程的获取模型,但是由于该方法中的深度学习模型并没有充分考虑到凡尔开闭点回归任务在的特殊性,因此其在空间泛化能力和计算精度上都存在不足。
5.因此,亟需一种为凡尔开闭点识别任务定制化的卷积神经网络回归模型来解决上述问题。
技术实现要素:
6.针对上述问题,本发明公开一种基于示功图的采油机井供液能力监测方法,该方法基于采油过程中生成的示功图,采用融合了高斯热力图、特征金字塔和注意力机制的深度学习网络模型,识别示功图的四个凡尔开闭点并据此实时计算采油机供液能力。
7.本方法具有以下步骤:
8.1)获取采油机历史工况记录的示功图数据集s:
9.s={si|i=1,2,...,n}
10.其中si表示第i张示功图图像样本,共n张;
11.2)为示功图数据集标定凡尔开闭点,并运用图像处理生成凡尔开闭点的像素点坐标值集合p:
12.p={pi|i=1,2,...,n}
13.pi={(r
ij
,c
ij
)|j=1,2,...,4}
14.其中pi表示示功图数据集中第i张示功图图片的四个凡尔开闭点的像素点坐标
值,(r
ij
,c
ij
)对应单个凡尔开闭点的像素点坐标值;
15.3)按下式将凡尔开闭点的像素点坐标值集合p归一化,并作为深度学习网络模型的标签集合l:
[0016][0017][0018]
其中(w,h)为示功图的像素分辨率;
[0019]
4)采用留出法将标定好的示功图数据集s划分为训练集s
train
、验证集s
val
和测试集s
test
;
[0020]
5)搭建预测高斯热图的深度学习网络模型,以满足凡尔开闭点识别任务对空间泛化能力和平移对等性的要求;
[0021]
6)在高斯热图预测模型中引入特征金字塔网络,以解决高斯热力图的分辨率导致的理论误差下界问题;
[0022]
7)在高斯热图预测模型的特征提取网络中嵌入注意力机制模块,以满足凡尔开闭点识别任务细粒度和高精度的要求;
[0023]
8)将搭建好的深度学习网络模型通过训练集s
train
和验证集s
val
学习网络参数,根据测试集s
test
结果评估其泛化能力,得到最终的网络模型;
[0024]
9)将采油机实时工况记录的示功图输入至网络模型中,获取对应的凡尔开闭点标签(x
rj
,y
rj
);
[0025]
10)根据凡尔开闭点标签计算凡尔开闭点的像素点坐标值(r
rj
,c
rj
):
[0026][0027][0028]
11)根据凡尔开闭点像素坐标值计算有效冲程s
pe
:
[0029][0030]
其中s
max
为采油机设备的最大冲程;
[0031]
12)根据有效冲程和采油机运行时冲程s的比值确定供液能力指标β:
[0032][0033]
本方法中,示功图数据集的凡尔开闭点像素点坐标包括:固定凡尔开启点a的坐标(r1,c1)、固定凡尔关闭点b的坐标(r2,c2)、游动凡尔开启点c的坐标(r3,c3)和游动凡尔关闭点d的坐标(r4,c4)。
[0034]
本方法中,凡尔开闭点的像素点坐标值归一化以示功图图像分辨率(w,h)为基准归一化至[-1,1],从而消除量纲影响,使得深度学习网络模型更易于收敛。
[0035]
本方法中,留出法的分配比例为6:2:2。
[0036]
本方法中,搭建预测高斯热图的深度学习网络模型时,为保证理论误差下界尽量
小的同时减少模型的参数量,将预测的高斯热图分辨率控制为示功图分辨率的1/4,即为
[0037]
本方法中,深度学习网络模型中嵌入注意力机制模块分为空间注意力机制和通道注意力机制,以此增加主干网络的表征能力,让网络模型能定位到对识别凡尔开闭点有价值的图片区域,并关注该区域中对识别凡尔开闭点更有价值的特征。
[0038]
有益效果:
[0039]
本发明所提供的方法,基于采油过程中生成的示功图,搭建深度学习网络模型识别示功图的四个凡尔开闭点并据此实时计算采油机井供液能力。降低了采油机井供液能力测量的成本。
[0040]
更进一步的,深度学习网络模型的搭建融合了高斯热力图、特征金字塔和注意力机制,以定制化的卷积神经网络回归模型提高了测量精度。为后续采油机冲次调节提供可靠的数据支撑,对于油田的节能增产具有重要应用价值。
附图说明
[0041]
图1是实施例中示功图数据集标定的示意图;
[0042]
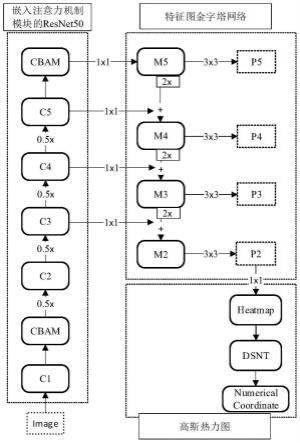
图2是实施例中用于识别凡尔开闭点的深度学习网络模型结构图;
[0043]
图3是实施例中深度学习网络模型训练时的损失函数图;
[0044]
图4是实施例中完成训练后的深度学习网络模型在测试集上的测试结果图;
[0045]
图5是实施例中实时工况下的样例示功图。
[0046]
具体实施过程
[0047]
下面结合附图以及具体的算例,给出详细的计算过程和具体操作流程,以对本发明作进一步说明。本实施案例在以本发明技术方案为前提下进行实施,但本发明的保护范围不限于下述的实施案例。
[0048]
本案例以某采油企业为例来说明本方法的有效性及实施过程,以2020年7月至2020年12月之间的数据构建训练集、验证集及测试集,分析本文方法对抽油机供液能力识别的有效性。
[0049]
具体的实施步骤如下:
[0050]
(1)获取采油机历史工况记录的示功图数据集共8672张。
[0051]
(2)为示功图数据集标定凡尔开闭点如图1所示,并运用图像处理生成凡尔开闭点的像素点坐标值作为该示功图的标签值,如表1所示,本实施例中取w=h=256。
[0052]
表1示功图凡尔开闭点像素坐标值
[0053]
凡尔开闭点像素点坐标值固定凡尔开启点a(30.23,41.15)固定凡尔关闭点b(246.77,57.69)游动凡尔开启点c(123.69,182.31)游动凡尔关闭点d(6.38,159.23)
[0054]
(3)将凡尔开闭点的像素点坐标值按照式(1)和(2)归一化作为深度学习网络模型的标签,如表2所示。
[0055]
表2示功图凡尔开闭点标签
[0056]
凡尔开闭点标签值固定凡尔开启点a(-0.764,-0.679)固定凡尔关闭点b(0.928,-0.548)游动凡尔开启点c(-0.034,0.424)游动凡尔关闭点d(-0.950,0.244)
[0057]
(4)采用留出法按照6:2:2将标定好的示功图数据集划分为训练集5204张、验证集1734张和测试集1734张。
[0058]
(5)针对凡尔开闭点识别任务对空间泛化能力和平移对等性的要求,搭建预测高斯热图的深度学习网络模型,并在其中融合特征金字塔网络和注意力机制模块,模型整体结构如图2所示。模型整体采用嵌入了注意力机制的resnet50作为特征提取网络,其中c1为初始卷积模块,c2、c3、c4和c5为残差块组成的bottleneck,cbam为注意力机制模块。在提取到示功图的特征后,模型采用特征金字塔网络fpn自上而下单向融合特征,其中m2、m3、m4和m5为融合后的特征图,p2、p3、p4和p5分别对应m2、m3、m4和m5经过3x3卷积消除混叠效应后的特征图。本实施例中选取p2作为最终高斯热力图预测模块的输入,该模块中heatmap表示高斯热力图谱,dsnt为将heatmap转化为坐标点输出的转换模块。
[0059]
(6)将搭建好的深度学习网络模型通过训练集和验证学习网络参数,训练过程中的损失函数值如图3所示,其中train_loss表示训练集损失函数值变化趋势曲线,val_loss表示验证集损失函数值变化趋势曲线。
[0060]
(7)将测试集输入至训练好的深度学习网络模型,得到网络模型在测试集上的识别结果如图4所示。
[0061]
(8)选取某采油企业一口采油机井在2021年2月实时工况记录的示功图,输入至训练完成的深度学习网络模型中,获取对应的凡尔开闭点预测标签值。以图5所示的示功图为例,将其输入至网络模型后,输出为{(-0.88,-0.68),(0.90,-0.52),(-0.67,0.01),(-0.90,-0.06)},分别对应固定凡尔开启点a的标签值(-0.88,-0.68),固定凡尔关闭点b的标签值(0.90,-0.52),游动凡尔开启点c的标签值(-0.67,0.01)和游动凡尔关闭点d的标签值(-0.90,-0.06)。将这些标签值按照式(3)和(4)计算后得到四个点的像素坐标为:固定凡尔开启点a的像素点坐标(15.36,40.96),固定凡尔关闭点b的像素点坐标(243.20,61.44),游动凡尔开启点c的像素点坐标(42.24,129.28)和游动凡尔关闭点d的像素点坐标(12.8,-120.32)。根据这四个凡尔开闭点地像素点坐标和式(5)计算其有效冲程s
pe
为:
[0062][0063]
再根据式(6)计算该油井的供液能力指标β为:
[0064][0065]
查看此时井口测量装置测量出的产液量为4.4m3,该井的理论产液量为36.7m3,由此计算出的泵效为11.98%,该结果与上文计算出的供液能力指标β的值非常接近。可见,该方法的计算结果完全能够准确反应油井的实际供液能力。
[0066]
由上述分析可知,本发明的采油机供液能力监测方法,能够实时准确地监测采油
机供液能力,为动态调节采油机冲次提供了可靠技术支持。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。