1.本发明涉及一种智能搬运器,具体涉及一种机械手式智能搬运器。
背景技术:
2.现有机械手智能搬运器对汽车轮胎内宽、最短轴距有所限制,对此,我们提出一种机械手式智能搬运器。
技术实现要素:
3.本发明所要解决的技术问题是提供一种机械手式智能搬运器,已解决上述问题。
4.本发明机械手式智能搬运器是通过以下技术方案来实现的:包括两相对设置的搬运器主体,且两搬运器主体通过伸缩支架连接;
5.所述搬运器主体包括夹持电机以及搬运器底座;所述夹持电机固定于搬运器底座上,且夹持电机的输出轴上安装有丝杆,丝杆转动固定于搬运器底座中央;所述丝杆上安装有齿条,齿条两端相对设置有过渡齿轮;所述搬运器底座两侧均对此设置有夹持臂组,与过渡齿轮相啮合;所述搬运器底座一端安装有行走组件。
6.作为优选的技术方案,行走组件包括行走电机和行走轴;所述行走电机安装于搬运器底座上,且行走轴设置于行走电机一侧;所述行走轴转动固定于搬运器底座的一端,且行走轴通过行走电机驱动;所述行走轴两端均安装有主动行走轮,搬运器底座另一端两侧安装有从动行走轮。
7.作为优选的技术方案,夹持臂组由两相对设置的夹持臂组成,夹持臂铰接于搬运器底座上;所述夹持臂的铰接端设置有齿,两相对设置的夹持臂的齿相互啮合,且一夹持臂的齿与过渡齿轮相啮合。
8.作为优选的技术方案,搬运器底座两端的两侧均安装有侧导轮。
9.本发明的有益效果是:本发明机构和控制简单,存取车时自动寻找汽车前后轮胎并完成存取车动作,使用方便。
附图说明
10.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
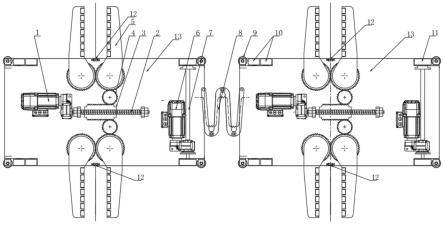
11.图1为本发明的俯视结构示意图;
12.图2为本发明的搬运器底座结构示意图。
具体实施方式
13.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥
的特征和/或步骤以外,均可以以任何方式组合。
14.如图1—图2所示,本发明的一种机械手式智能搬运器,包括两相对设置的搬运器主体,且两搬运器主体通过伸缩支架8连接,通过伸缩支架自适应不同轴距汽车。
15.搬运器主体包括夹持电机1以及搬运器底座13;夹持电机1固定于搬运器底座13上,且夹持电机1的输出轴上安装有丝杆2,丝杆2转动固定于搬运器底座13中央;丝杆2上安装有齿条3,齿条3两端相对设置有过渡齿轮4;搬运器底座13两侧均对此设置有夹持臂组5,与过渡齿轮4相啮合;搬运器底座13一端安装有行走组件。
16.本实施例中,行走组件包括行走电机6和行走轴7;行走电机9安装于搬运器底座13上,且行走轴7设置于行走电机9一侧;行走轴9转动固定于搬运器底座13的一端,且行走轴9通过行走电机6驱动;行走轴9两端均安装有主动行走轮11,搬运器底座13另一端两侧安装有从动行走轮10。
17.本实施例中,夹持臂组5由两相对设置的夹持臂组成,夹持臂铰接于搬运器底座13上;夹持臂的铰接端设置有齿,两相对设置的夹持臂的齿相互啮合,且一夹持臂的齿与过渡齿轮4相啮合;齿条通过过渡齿轮推动夹持臂转动,前后夹持臂同时夹持汽车轮胎。
18.本实施例中,搬运器底座13两端的两侧均安装有侧导轮9,便于导向华东。
19.本实施例中,夹持臂组5之间安装有轮胎检测开关12,用于检测轮胎是否到位。
20.工作原理如下:
21.存车时:行走电机运转,搬运器载车前行至停车位,夹持电机运转,丝杠驱动齿条移动,齿条通过过渡齿轮推动夹持臂转动,前后夹持臂同时打开将汽车存放至停车位;搬运器退回;
22.取车时:行走电运转,搬运器前行至停车位,前后轮夹持机构通过伸缩支架自适应不同轴距汽车,轮胎检测开关发出信号,夹持电机运转,丝杠驱动件3齿条移动,齿条通过过渡齿轮推动夹持臂转动,前后夹持臂同时夹持汽车轮胎;搬运器载车退回。
23.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
技术特征:
1.一种机械手式智能搬运器,其特征在于:包括两相对设置的搬运器主体,且两搬运器主体通过伸缩支架(8)连接;所述搬运器主体包括夹持电机(1)以及搬运器底座(13);所述夹持电机(1)固定于搬运器底座(13)上,且夹持电机(1)的输出轴上安装有丝杆(2),丝杆(2)转动固定于搬运器底座(13)中央;所述丝杆(2)上安装有齿条(3),齿条(3)两端相对设置有过渡齿轮(4);所述搬运器底座(13)两侧均对此设置有夹持臂组(5),与过渡齿轮(4)相啮合;所述搬运器底座(13)一端安装有行走组件。2.根据权利要求1所述的机械手式智能搬运器,其特征在于:所述行走组件包括行走电机(6)和行走轴(7);所述行走电机(9)安装于搬运器底座(13)上,且行走轴(7)设置于行走电机(9)一侧;所述行走轴(9)转动固定于搬运器底座(13)的一端,且行走轴(9)通过行走电机(6)驱动;所述行走轴(9)两端均安装有主动行走轮(11),搬运器底座(13)另一端两侧安装有从动行走轮(10)。3.根据权利要求1所述的机械手式智能搬运器,其特征在于:所述所述夹持臂组(5)由两相对设置的夹持臂组成,夹持臂铰接于搬运器底座(13)上;所述夹持臂的铰接端设置有齿,两相对设置的夹持臂的齿相互啮合,且一夹持臂的齿与过渡齿轮(4)相啮合。4.根据权利要求1所述的机械手式智能搬运器,其特征在于:所述搬运器底座(13)两端的两侧均安装有侧导轮(9)。5.根据权利要求1所述的机械手式智能搬运器,其特征在于:所述夹持臂组(5)之间安装有轮胎检测开关(12)。
技术总结
本发明公开了一种机械手式智能搬运器,包括两相对设置的搬运器主体,且两搬运器主体通过伸缩支架连接;所述搬运器主体包括夹持电机以及搬运器底座;所述夹持电机固定于搬运器底座上,且夹持电机的输出轴上安装有丝杆,丝杆转动固定于搬运器底座中央;所述丝杆上安装有齿条,齿条两端相对设置有过渡齿轮;所述搬运器底座两侧均对此设置有夹持臂组,与过渡齿轮相啮合;所述搬运器底座一端安装有行走组件。本发明机构和控制简单,存取车时自动寻找汽车前后轮胎并完成存取车动作,使用方便。使用方便。使用方便。
技术研发人员:林伟通 胡云高 郭勇金 廖威
受保护的技术使用者:广东伟创五洋智能设备有限公司 东莞市伟创华鑫自动化设备有限公司 江苏五洋停车产业集团股份有限公司 山东天辰智能停车有限公司
技术研发日:2022.01.22
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。