1.本发明涉及农业生产机器人技术领域,尤其涉及一种梯田自动生产机器人。
背景技术:
2.农业是指国民经济中一个重要产业部门,是以土地资源为生产对象的部门,它是通过培育动植物产品从而生产食品及工业原料的产业。农业属于第一产业。利用土地资源进行种植生产的部门是种植业,利用土地上水域空间进行水产养殖的是水产业,又叫渔业,利用土地资源培育采伐林木的部门,是林业,利用土地资源培育或者直接利用草地发展畜牧的是畜牧业。对这些产品进行小规模加工或者制作的是副业,它们都是农业的有机组成部分。
3.当前,我国正处于从机械化农业向“智慧农业”变革的关键时期。随着我国农业领域加速转型升级,农业经营主体不断壮大,落实人工智能技术应用,加快农业机器人发展获得了更好的环境,农业机器人是一种新型智能农业机械,可用于农业生产中的诸多环节。农业机器人的诞生,不仅是机器人技术发展的产物,更是农业现代化发展的必然成果。随着农业机器人广泛应用,传统的农业生产模式得以升级,现代农业得以加速变革。
4.现有的梯田自动生产机器人功能较为单一,难以满足农业自动生产需求,为此,我们提出一种梯田自动生产机器人解决上述问题。
技术实现要素:
5.本发明提供一种梯田自动生产机器人,解决了现有的梯田自动生产机器人功能较为单一,难以满足农业自动生产需求的技术问题。
6.为解决上述技术问题,本发明提供的一种梯田自动生产机器人,包括外壳、履带轮、rtk天线、激光雷达、三点式后悬挂总成、旋耕总成、播种总成和做畦总成,所述履带轮安装在外壳的左右两侧,所述外壳前侧与顶部均安装有rtk天线,所述外壳顶部的左右两侧均安装有激光雷达,所述外壳的内部安装有三点式后悬挂总成,所述旋耕总成、播种总成和做畦总成均通过三点式后悬挂总成与外壳连接。
7.优选的,所述三点式后悬挂总成包括上支架、龙门架、下支架、电油缸、纵梁和圆柱销,所述龙门架与下支架均通过焊接与外壳构成固定,所述上支架铰接在龙门架顶部,所述电油缸底端通过圆柱销与下支架铰接,所述电油缸伸缩端通过圆柱销与上支架铰接,所述纵梁铰接在下支架中部,使得机器人可以根据需要悬挂不同的农业作业机具。
8.优选的,所述旋耕总成包括旋耕机架、左侧板、右侧板、刀轴、右旋刀、左旋刀、直流无刷电机和从动双排链轮,所述旋耕机架固定安装在三点式后悬挂总成上,所述左侧板安装在旋耕机架下部左侧,所述右侧板安装在旋耕机架下部右侧,所述旋耕机架内部转动安装有刀轴,所述刀轴上等间隔安装有多个右旋刀与左旋刀,所述右侧板的一侧安装有直流无刷电机,所述右侧板的内部设有安装腔,所述刀轴延伸至安装腔内部的一端安装有从动双排链轮,所述直流无刷电机的驱动端延伸至安装腔的内部且固定安装有主动双排链轮,
所述主动双排链轮与从动双排链轮之间传动连接有双排链条,使得机器人具备旋耕功能,能够根据任务信息自动完成旋耕。
9.优选的,所述播种总成包括播种挂接架、播种驱动电机、播种器组件和镇压轮组件,所述播种挂接架固定安装在三点式后悬挂总成上,所述播种挂接架左侧下部安装有播种驱动电机,所述播种器组件安装在播种挂接架内部,所述播种驱动电机的驱动端与播种器组件左端连接,所述镇压轮组件转动安装在播种挂接架后侧,使得机器人具备播种功能,能够根据任务信息自动完成播种。
10.优选的,所述做畦总成包括做畦机架、圆盘犁、挡泥板、做畦轮、安装罩壳、从动传动链轮、传动链条和做畦电机,所述做畦机架固定安装在三点式后悬挂总成上,所述圆盘犁通过活动连接机构安装在做畦机架前端的左右两侧,所述挡泥板的数量为两个,两个所述挡泥板均通过调节螺栓与做畦机架构成固定,所述做畦机架后端对称安装有两个安装罩壳,两个所述安装罩壳之间转动安装有做畦轮,所述做畦轮的一端延伸至安装罩壳的内部且固定安装有从动传动链轮,所述做畦机架内侧安装有做畦电机,所述做畦电机的驱动端延伸至安装罩壳的内部且固定安装有主动传动链轮,所述从动传动链轮与主动传动链轮之间传动连接有传动链条,使得机器人具备做畦功能,能够根据任务信息自动完成做畦。
11.优选的,所述刀轴延伸至安装腔内部的一端安装有圆形轴承座,所述刀轴通过圆形轴承座与安装腔连接,通过圆形轴承座提高了刀轴安装的稳定性,防止刀轴在转动的过程中出现晃动的情况。
12.优选的,所述右旋刀与左旋刀为交错设置,所述右旋刀与左旋刀均通过固定螺栓与刀轴构成固定,交错设置使得旋耕后的土壤破碎更加均匀,且采用固定螺栓方便了右旋刀与左旋刀的安装和拆卸。
13.优选的,所述播种驱动电机的外部罩设有电机罩壳,所述电机罩壳与播种挂接架固定连接,通过电机罩壳对播种驱动电机进行很好的防护,避免播种驱动电机暴露在外部没有任何安全保障,容易被灰尘、污水或者飞溅物侵入导致电器短路的问题,延长了播种驱动电机的使用寿命。
14.优选的,所述活动连接机构包括套筒、滑杆和锁紧螺栓,所述套筒与做畦机架固定连接,所述滑杆滑动连接在套筒的内部,所述圆盘犁安装在滑杆的底端,所述套筒的侧壁上开设有预留孔,所述锁紧螺栓螺纹连接在预留孔的内部,所述锁紧螺栓延伸至套筒内部的一端与滑杆的外壁紧抵,锁紧螺栓是滑杆的锁紧件,当锁紧螺栓旋紧时能够对圆盘犁的位置进行固定,当锁紧螺栓旋松时滑杆能够在套筒内部进行上下滑动和任意转动,进而能够对圆盘犁的高度和角度进行调节,使得圆盘犁的调节更加方便。
15.优选的,所述外壳为不锈钢材质,所述外壳的外表面涂覆有防水漆,不锈钢材质具有耐腐蚀硬度高的优点,使得外壳不易锈蚀,能够适应各种极端天气,延长外壳的使用寿命。
16.与相关技术相比较,本发明提供的一种梯田自动生产机器人具有如下有益效果:
17.通过设置的旋耕总成使得机器人具备旋耕功能,能够根据任务信息自动完成旋耕,通过设置的播种总成使得机器人具备播种功能,能够根据任务信息自动完成播种,通过设置的做畦总成使得机器人具备做畦功能,能够根据任务信息自动完成做畦,功能多样,能够自动完成梯田生产作业,满足梯田自动生产需求。
附图说明
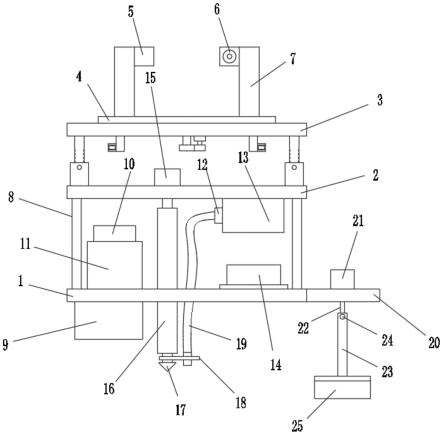
18.图1为一种梯田自动生产机器人的侧视结构示意图;
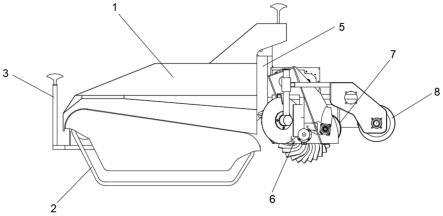
19.图2为一种梯田自动生产机器人的俯视结构示意图;
20.图3为一种梯田自动生产机器人的正视结构示意图;
21.图4为一种梯田自动生产机器人中三点式后悬挂总成的后视结构示意图;
22.图5为一种梯田自动生产机器人中三点式后悬挂总成的侧视结构示意图;
23.图6为一种梯田自动生产机器人中旋耕总成的侧视结构示意图;
24.图7为一种梯田自动生产机器人中旋耕总成的正视结构示意图;
25.图8为一种梯田自动生产机器人中旋耕总成的侧视结构示意图;
26.图9为一种梯田自动生产机器人中播种总成的正视结构示意图;
27.图10为一种梯田自动生产机器人中播种总成的侧视结构示意图;
28.图11为一种梯田自动生产机器人中做畦总成的正视结构示意图;
29.图12为一种梯田自动生产机器人中做畦总成的俯视结构示意图;
30.图13为一种梯田自动生产机器人中做畦总成的侧视剖面结构示意图。
31.图中标号:1、外壳;2、履带轮;3、rtk天线;4、激光雷达;5、三点式后悬挂总成;501、上支架;502、龙门架;503、下支架;504、电油缸;505、纵梁;506、圆柱销;6、旋耕总成;601、旋耕机架;602、左侧板;603、右侧板;604、刀轴;605、右旋刀;606、左旋刀;607、直流无刷电机;608、圆形轴承座;609、从动双排链轮;7、播种总成;701、播种挂接架;702、播种驱动电机;703、播种器组件;704、镇压轮组件;705、电机罩壳;8、做畦总成;801、做畦机架;802、圆盘犁;803、挡泥板;804、做畦轮;805、安装罩壳;806、从动传动链轮;807、传动链条;808、做畦电机。
具体实施方式
32.下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
33.在本发明的描述中,需要理解的是,如果有涉及到的术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
34.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以
根据具体情况理解上述术语在本发明中的具体含义。
35.实施例一,由图1-13给出,一种梯田自动生产机器人,包括外壳1、履带轮2、rtk天线3、激光雷达4、三点式后悬挂总成5、旋耕总成6、播种总成7和做畦总成8,履带轮2安装在外壳1的左右两侧,外壳1前侧与顶部均安装有rtk天线3,外壳1顶部的左右两侧均安装有激光雷达4,外壳1的内部安装有三点式后悬挂总成5,旋耕总成6、播种总成7和做畦总成8均通过三点式后悬挂总成5与外壳1连接,三点式后悬挂总成5包括上支架501、龙门架502、下支架503、电油缸504、纵梁505和圆柱销506,龙门架502与下支架503均通过焊接与外壳1构成固定,上支架501铰接在龙门架502顶部,电油缸504底端通过圆柱销506与下支架503铰接,电油缸504伸缩端通过圆柱销506与上支架501铰接,纵梁505铰接在下支架503中部,使得机器人可以根据需要悬挂不同的农业作业机具。
36.实施例二,在实施例一的基础上,旋耕总成6包括旋耕机架601、左侧板602、右侧板603、刀轴604、右旋刀605、左旋刀606、直流无刷电机607和从动双排链轮609,旋耕机架601固定安装在三点式后悬挂总成5上,左侧板602安装在旋耕机架601下部左侧,右侧板603安装在旋耕机架601下部右侧,旋耕机架601内部转动安装有刀轴604,刀轴604上等间隔安装有多个右旋刀605与左旋刀606,右侧板603的一侧安装有直流无刷电机607,右侧板603的内部设有安装腔,刀轴604延伸至安装腔内部的一端安装有从动双排链轮609,直流无刷电机607的驱动端延伸至安装腔的内部且固定安装有主动双排链轮,主动双排链轮与从动双排链轮609之间传动连接有双排链条,使得机器人具备旋耕功能,能够根据任务信息自动完成旋耕。
37.实施例三,在实施例一的基础上,播种总成7包括播种挂接架701、播种驱动电机702、播种器组件703和镇压轮组件704,播种挂接架701固定安装在三点式后悬挂总成5上,播种挂接架701左侧下部安装有播种驱动电机702,播种器组件703安装在播种挂接架701内部,播种驱动电机702的驱动端与播种器组件703左端连接,镇压轮组件704转动安装在播种挂接架701后侧,使得机器人具备播种功能,能够根据任务信息自动完成播种。
38.实施例四,在实施例一的基础上,做畦总成8包括做畦机架801、圆盘犁802、挡泥板803、做畦轮804、安装罩壳805、从动传动链轮806、传动链条807和做畦电机808,做畦机架801固定安装在三点式后悬挂总成5上,圆盘犁802通过活动连接机构安装在做畦机架801前端的左右两侧,挡泥板803的数量为两个,两个挡泥板803均通过调节螺栓与做畦机架801构成固定,做畦机架801后端对称安装有两个安装罩壳805,两个安装罩壳805之间转动安装有做畦轮804,做畦轮804的一端延伸至安装罩壳805的内部且固定安装有从动传动链轮806,做畦机架801内侧安装有做畦电机808,做畦电机808的驱动端延伸至安装罩壳805的内部且固定安装有主动传动链轮,从动传动链轮806与主动传动链轮之间传动连接有传动链条807,使得机器人具备做畦功能,能够根据任务信息自动完成做畦。
39.实施例五,在实施例二的基础上,刀轴604延伸至安装腔内部的一端安装有圆形轴承座608,刀轴604通过圆形轴承座608与安装腔连接,通过圆形轴承座608提高了刀轴604安装的稳定性,防止刀轴604在转动的过程中出现晃动的情况。
40.实施例六,在实施例二的基础上,右旋刀605与左旋刀606为交错设置,右旋刀605与左旋刀606均通过固定螺栓与刀轴604构成固定,交错设置使得旋耕后的土壤破碎更加均匀,且采用固定螺栓方便了右旋刀605与左旋刀606的安装和拆卸。
41.实施例七,在实施例三的基础上,播种驱动电机702的外部罩设有电机罩壳705,电机罩壳705与播种挂接架701固定连接,通过电机罩壳705对播种驱动电机702进行很好的防护,避免播种驱动电机702暴露在外部没有任何安全保障,容易被灰尘、污水或者飞溅物侵入导致电器短路的问题,延长了播种驱动电机702的使用寿命。
42.实施例八,在实施例四的基础上,活动连接机构包括套筒、滑杆和锁紧螺栓,套筒与做畦机架801固定连接,滑杆滑动连接在套筒的内部,圆盘犁802安装在滑杆的底端,套筒的侧壁上开设有预留孔,锁紧螺栓螺纹连接在预留孔的内部,锁紧螺栓延伸至套筒内部的一端与滑杆的外壁紧抵,锁紧螺栓是滑杆的锁紧件,当锁紧螺栓旋紧时能够对圆盘犁802的位置进行固定,当锁紧螺栓旋松时滑杆能够在套筒内部进行上下滑动和任意转动,进而能够对圆盘犁802的高度和角度进行调节,使得圆盘犁802的调节更加方便。
43.实施例九,在实施例一的基础上,外壳1为不锈钢材质,外壳1的外表面涂覆有防水漆,不锈钢材质具有耐腐蚀硬度高的优点,使得外壳1不易锈蚀,能够适应各种极端天气,延长外壳1的使用寿命。
44.本发明提供的一种梯田自动生产机器人的工作原理:
45.直流减速电机可为履带轮2提供驱动动力,通过在外壳1上安装的履带轮2可方便机器人的移动,通过在外壳1内部安装的三点式后悬挂总成5,可以根据需要悬挂不同的农业作业机具,且机器人具备自动驾驶系统,通过在外壳1上安装的rtk天线3和激光雷达4为能够为自动驾驶系统提供定位信息,激光雷达4为自动驾驶系统提供障碍物信息,为避障提供环境信息。
46.自动驾驶系统的作业过程如下:
47.开机——》操作员下发作业命令——》rtk天线3和激光雷达4初始化定位信息——》启动自动驾驶——》自动驾驶系统根据定位和路径信息,自动控制直流减速电机启动,履带轮2运行使机器人延目标路径进行作业,直至作业完成;
48.挂载于三点式后悬挂总成5上的旋耕总成6根据任务信息自动完成旋耕作业;
49.旋耕动力来源于直流无刷电机607,可无极调节速度和力度,从而控制旋耕机根据地块松软程度使用不同的作业动力,达到精准作业,节约能量的目的;
50.自动旋耕的作业过如下:
51.在启动自动作业时——》检测机器人底盘行走到目标位置,电油缸504启动,放下旋耕总成6——》直流无刷电机607启动——》开始作业——》一条路径完成——》直流无刷电机607停止——》电油缸504带动旋耕总成6抬升——》行走到下一条路径,循环开始作业直至结束;
52.挂载于三点式后悬挂总成5上的播种总成7根据任务信息自动播种;
53.播种动力来源于播种驱动电机702,可无极调节播种速度,从而控制播种精准度;
54.自动播种的作业过如下:
55.在启动自动作业时——》检测机器人底盘行走到目标位置,电油缸504启动,放下播种总成7——》播种驱动电机702根据当前行进速度和播种密度,计算作业转速并启动——》开始播种作业——》一条畦播种完成——》播种驱动电机702停止——》电油缸504带动播种总成7抬升——》行走到下一畦面,循环开始作业直至结束;
56.挂载于三点式后悬挂总成5的做畦总成8根据任务信息自动完成做畦;
57.做畦动力来源于做畦电机808,可随时检测作业过程中的做畦电机808运转情况,从而判断作业质量。
58.在启动自动作业时——》检测机器人底盘行走到目标位置,电油缸504启动,放下做畦总成8——》做畦电机808启动——》开始作业——》一条畦完成——》做畦电机808停止——》电油缸504带动做畦总成8——》行走到下一畦面,循环开始作业直至结束。
59.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
60.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。