1.本发明属于无人机控制领域,特别涉及一种光通信感知传能一体化无人机系统。
背景技术:
2.随着无人机技术的发展,小型化智能化的无人机已被广泛应用在生活中,例如航拍、位置探测等。但是由于无人机本身续航能力的限制,无法做到超长时间的飞行和工作。现有的射频无线传能方法也存在着能量效率低,传能不稳定的缺点。
3.光信号的波束窄、带宽高,同时也不会与射频信号发生串扰,具有极高的稳定性和保密性。光信号的高指向性也提高了目标定位的精度和能量利用效率。将光无线通信与传能技术用于智能无人机,可以在给无人机提供高速率、高稳定性和高保密性的通信服务的同时,高能效地传输能量,使无人机可以全时高效率地工作,极大地拓展了无人机的应用场景。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本发明提供一种光通信感知传能一体化无人机系统,可作为一个全时工作的移动接入点,实时侦测周围环境并进行高速通信。
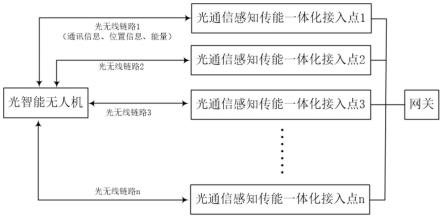
5.技术方案:为实现上述发明目的,本发明的一种光通信感知传能一体化无人机系统,该系统包括一个光智能无人机和一个或多个光通信感知传能一体化接入点;光智能无人机与一个或多个光通信感知传能一体化接入点通过光无线链路相连,并传输通讯信息、位置信息和能量;光通信感知传能一体化接入点通过网线与网关相连;其中,
6.光智能无人机由机架、动力系统和控制系统组成;机架包括机身和起落架;动力系统包括电机、电池、光功放模块、光电转换模块;控制系统包括飞行控制模块、定位模块、光信号收发模块、信号处理模块及图像识别与处理模块;
7.光通信感知传能一体化接入点由光信号收发子系统、信号处理子系统、功率控制子系统和起落平台组成;光信号收发子系统包括引导光源、通信光源、光接收机、机械舵机;信号处理子系统包括位置信息处理模块、光通信模块;功率控制子系统包括光功放模块;
8.光通信感知传能一体化无人机系统的实现过程包括预链接阶段和信息与能量传输阶段两个阶段,具体包括以下步骤:
9.步骤一、首先系统进入预链接阶段,在光智能无人机与光通信感知传能一体化接入点保持相对静止的情况下,光通信感知传能一体化接入点向自由空间发射引导光束,搜索光智能无人机的位置;
10.步骤二、光通信感知传能一体化接入点根据光智能无人机反射的引导光束或无人机发送的反馈信号,确定光智能无人机所在位置,并朝无人机发射通信波束,与光智能无人机进行预链接,随后系统进入信息与能量传输阶段;
11.步骤三、在信息与能量传输阶段,光智能无人机根据来自光通信感知传能一体化接入点的指令信息进行移动;同时,光智能无人机实时接收来自光通信感知传能一体化接
入点的光信号,并从中提取位置信息和指令信息;在场景中有多个光通信感知传能一体化接入点的情况下,光智能无人机根据多个位置信息分析出自身绝对位置,并将分析后的绝对位置信息送给光通信感知传能一体化接入点;
12.步骤四、光智能无人机接收到的光信号能量,一部分用于通信和定位,另一部分通过光电转换模块给电机供电或给电池充电,从而提高无人机的工作时间;在信道较差的环境下,光智能无人机提高用于通信的光功率比例,在信道好的环境下,提高用于充电的光功率比例,从而实现对接收光功率的智能调控。
13.进一步的,所述光智能无人机的结构为:机架中的机身连接到动力系统的电机,动力系统的电机和光功放模块分别连接到控制系统的飞行控制模块和光信号收发模块;其中,机架的结构为起落架与机身相连;动力系统的结构为:电机连接到电池,电池连接到光电转换模块,光电转换模块连接到光功放模块;控制系统的结构为:飞行控制模块和光信号收发模块连接到信号处理模块,信号处理模块连接到定位模块及图像识别与处理模块。
14.进一步的,所述光通信感知传能一体化接入点的结构为:起落平台连接到光信号收发子系统的接收机,光信号收发子系统的接收机连接到信号处理子系统的位置信息处理模块、光通信模块,以及功率控制子系统的光功放模块,信号处理子系统的位置信息处理模块连接到光信号收发子系统的引导光源和机械舵机,信号处理子系统的光通信模块和功率控制子系统的光功放模块连接到光信号收发子系统的通信光源;其中,光信号收发子系统的机械舵机连接到引导光源和通信光源;信号处理子系统的光通信模块还连接到网关。
15.进一步的,步骤一所述光通信感知传能一体化接入点向自由空间发射引导光束,搜索光智能无人机的位置,具体实现方式如下:
16.机械舵机控制引导光源发出的激光束即引导光束在自由空间进行周期性的扫描,同时激光束上加载原定位信息o(t),原定位信息o(t)与时间t和到达角θ(t)严格相关,对应关系为:
17.f:θ(t)
→
o(t)
ꢀꢀꢀ
(1)。
18.进一步的,步骤二所述光通信感知传能一体化接入点根据光智能无人机反射的引导光束或无人机发送的反馈信号,确定光智能无人机所在位置,具体步骤如下:
19.步骤2.1、光智能无人机接收到引导光束后,在引导光信号的信息末尾添加光智能无人机信息u(t),并将修改后的引导光信号作为反馈信号发送给光通信感知传能一体化接入点;光通信感知传能一体化接入点收到的反馈信号o'(t)为:
20.o'(t)=o(t-τ) u(t-τ-τo)
ꢀꢀꢀ
(2)
21.其中,τ为信号传播延时与光通信感知传能一体化接入点信号处理延时的总和,τo为光智能无人机信息长度;
22.步骤2.2、光通信感知传能一体化接入点根据接收到的反馈信号o'(t)中的原定位信号o(t)和延时τ推出光智能无人机的到达角θ(t)和距离d:到达角θ(t)根据式(1)推出;距离d为:
[0023][0024]
其中,c为光速,t
p
为估计的光通信感知传能一体化接入点处理延时。
[0025]
进一步的,步骤三所述提取位置信息包括光智能无人机与光通信感知传能一体化
接入点的相对距离和方向。
[0026]
进一步的,所述光智能无人机在非工作状态降落至光通信感知传能一体化接入点的起落平台进行充电。
[0027]
有益效果:与现有技术相比,本发明的有益效果是:
[0028]
与传统的无人机系统相比,本发明的系统在提高了无人机的通信传输速率的同时,极大地提升了无人机的续航能力,可以使无人机作为一个智能的移动接入点持续工作,拓展了无人机的应用场景;与现有的无人机无线传能技术相比,本发明可实现无人机的通信感知传能一体化,其核心是在建立无人机的通信与定位网络的同时,满足无人机的能量传输,具体表现为以下几点:
[0029]
1、本发明采用光频段信号作为通信与能量传输的媒介,具有频谱资源丰富、能量效率高、保密性强的优点;
[0030]
2、本发明采用光定位技术实时跟踪无人机的位置,定位精度更高且非常适合三维自由空间目标位置的确定;
[0031]
3、光信号与射频信号间不会发生串扰,因此本发明中的系统不会对电子设备产生干扰,也不会受到环境中的电磁波的干扰;
[0032]
4、该发明中系统可以在通信链路正常工作的基础上,通过给无人机添加新的模块以实现更多的功能,具有良好的延展性;
[0033]
5、整个系统的复杂度较低,光通信感知传能一体化接入点和智能无人机都比较容易实现。
附图说明
[0034]
图1是光通信感知传能一体化无人机系统结构框图;
[0035]
图2是光智能无人机结构框图;
[0036]
图3是光通信感知传能一体化接入点结构框图。
具体实施方式
[0037]
下面结合附图对本发明作更进一步的说明。
[0038]
本发明的光通信感知传能一体化无人机系统主要包括一个光智能无人机和一个或多个光通信感知传能一体化接入点,如图1所示,在环境中设置一个或多个光通信感知传能一体化接入点,光智能无人机与一个或多个光通信感知传能一体化接入点通过光无线链路相连,并传输通讯信息、位置信息和能量。光通信感知传能一体化接入点通过光无线链路与光智能无人机相连,并且通过网线与网关相连。
[0039]
如图2所示,光智能无人机由机架、动力系统和控制系统组成。机架包括机身和起落架。动力系统包括电机、电池、光功放模块、光电转换模块。控制系统包括定位模块、图像识别和处理模块、飞行控制模块、光信号收发模块和信号处理模块。其中,机架中的机身连接到动力系统的电机,动力系统的电机和光功放模块分别连接到控制系统的飞行控制模块和光信号收发模块;其中,机架的结构为起落架与机身相连;动力系统的结构为:电机连接到电池,电池连接到光电转换模块,光电转换模块连接到光功放模块;控制系统的结构为:飞行控制模块和光信号收发模块连接到信号处理模块,信号处理模块连接到定位模块和图
像识别与处理模块。
[0040]
如图3所示,光通信感知传能一体化接入点由光信号收发子系统、信号处理子系统、功率控制子系统和起落平台组成。光信号收发子系统包括引导光源、通信光源、光接收机、机械舵机。信号处理子系统包括位置信息处理模块、光通信模块。功率控制子系统包括光功放模块。其中,起落平台连接到光信号收发子系统的接收机,光信号收发子系统的接收机连接到信号处理子系统的位置信息处理模块、光通信模块,以及功率控制子系统的光功放模块,信号处理子系统的位置信息处理模块连接到光信号收发子系统的引导光源和机械舵机,信号处理子系统的光通信模块和功率控制子系统的光功放模块连接到光信号收发子系统的通信光源;其中,光信号收发子系统的机械舵机连接到引导光源和通信光源;信号处理子系统的光通信模块还连接到网关。
[0041]
下面结合附图对各个步骤进行更详尽的说明。
[0042]
步骤一,首先系统进入预链接阶段,光通信感知传能一体化接入点向自由空间发射引导光束,搜索无人机的位置,此时无人机需要与光通信感知传能一体化接入点保持相对静止。光通信感知传能一体化接入点也可以使用摄像头,利用图像识别技术辅助定位无人机位置。
[0043]
在步骤一中,引导光束搜索无人机实现方式之一如下:
[0044]
步骤1.1、机械舵机控制引导光源发出的激光束即引导光束在自由空间进行周期性的扫描,同时激光束上加载原定位信息o(t),原定位信息o(t)与时间t和到达角θ(t)严格相关,对应关系为
[0045]
f:θ(t)
→
o(t)
[0046]
步骤二,光通信感知传能一体化接入点根据无人机反射的引导光束或者无人机发送的反馈信号,确定无人机所在位置,并朝无人机发射通信波束,与无人机进行预链接,随后系统进入信息与能量传输阶段。
[0047]
具体实施方式如下:
[0048]
步骤2.1、光智能无人机接收到引导光信号后,在信息末尾添加无人机信息u(t),并将修改后的引导光信号作为反馈信号发送给光通信感知传能一体化接入点。光通信感知传能一体化接入点收到的反馈信号为
[0049]
o'(t)=o(t-τ) u(t-τ-τo)
[0050]
其中,τ为信号传播延时与光通信感知传能一体化接入点信号处理延时的总和,τo为光智能无人机信息长度。
[0051]
步骤2.2、光通信感知传能一体化接入点根据接收到的反馈信号o'(t)中的原定位信号o(t)和延时τ推出无人机的到达角θ(t)和距离d。到达角θ(t)根据步骤1.1中θ(t)和o(t)的对应关系,由o(t)推出;距离d为:
[0052][0053]
其中,c为光速,t
p
为估计的光通信感知传能一体化接入点信号处理延时。
[0054]
光通信感知传能一体化接入点可以延到达角θ(t)朝反方向发射通信波束,并根据距离d调节发射的光功率。
[0055]
步骤三,在信息与能量传输阶段,光智能无人机可以根据来自光通信感知传能一体化接入点的指令信息进行移动。同时,光智能无人机实时接收来自光通信感知传能一体化接入点的光信号,并从中提取位置信息和指令信息,位置信息包括无人机与光通信感知传能一体化接入点相对距离和方向。在场景中有多个接入点的情况下,无人机可以根据多个位置信息分析出自身绝对位置,并将分析后的绝对位置信息发送给光通信感知传能一体化接入点。
[0056]
步骤四,无人机接收到的光信号能量,一部分用于通信和定位,另一部分通过光电转换模块直接给电机供电或者给电池充电,从而提高无人机的工作时间。在信道比较差的环境下,无人机可以提高用于通信的光功率比例,在信道好的环境下,提高用于充电的光功率比例,从而实现对接收光功率的智能调控。
[0057]
此外,本发明的智能无人机在与环境中的光通信感知传能一体化接入点建立通信和传能链接的基础上,可以实时采集图像、语音等信息,并通过与光通信感知传能一体化接入点的通信链路传输给用户。同时它还可以与用户进行动态交互,融合人工智能技术,可以实现更多应用,例如老人小孩的实时看护、健康监测、区域巡航等。
[0058]
光通信感知传能一体化接入点上设有起落平台,光智能无人机在非工作状态可以降落至接入点进行充电。
[0059]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。