1.本发明涉及配电房管理技术领域,尤其是涉及一种基于深度学习的净水厂配电房图像采集与识别方法。
背景技术:
2.净水厂配电房是整条净水链中电力枢纽,需要时刻关注配电房中展示的各样数据处于正常状态,以便于净水链设备正常可靠运行。
3.由于配电房中处于各种各样线缆产生的电磁干扰下,更换传感器设备所需成本很高,目前常规配电房采取人员巡检多次记录以及蜂鸣报警的方式,容易忽视许多临界问题,导致处理不及时,便可能产生重大损失。
技术实现要素:
4.本发明的目的在于克服上述技术不足,提出一种基于深度学习的净水厂配电房图像采集与识别方法,解决现有技术中巡检繁琐、获取设备状态不及时的技术问题。
5.为达到上述技术目的,第一方面,本发明的技术方案提供一种基于深度学习的净水厂配电房图像采集与识别方法,包括以下步骤:
6.获取包含指示灯的图片集,对所述图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;
7.对所述指示灯训练样本进行深度学习训练,得到训练权重;
8.获取配电房的图像数据,根据所述训练权重确定所有所述指示灯的位置和指示灯识别中心;
9.对所述图像数据进行hsv(hue色调,saturation饱和度,value明度)色域转换处理,并获取所述指示灯识别中心的s-v值,对所述图像数据进行色值筛选和二值化处理,所述指示灯亮位置显示为白块;
10.根据所有所述指示灯的位置信息和白块的位置信息,输出所有所述指示灯的亮灭状态。
11.与现有技术相比,本发明的有益效果包括:
12.本发明提供的基于深度学习的净水厂配电房图像采集与识别方法能够全天候实时监视配电房的运行数据,便于净水链设备正常可靠运行。相较于常规配电房采取人员巡检多次记录以及蜂鸣报警的方式,本发明能够极大的降低设备监视成本,降低设备运行的风险,能够及时发现设备运行异常,并对异常情况可以及时处理,减少可能出现的重大损失。
13.根据本发明的一些实施例,所述对所述图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本,包括步骤:
14.对所述图片集的指示灯位置进行图像裁切,并标定所述指示灯四角的点位信息,以建立巡检集样本。
15.根据本发明的一些实施例,所述建立巡检集样本,至少包括以下步骤之一:
16.对所述巡检集样本,进行透视拉伸处理建立新的训练集样本,以模拟在不同状态下拍摄的图像数据;
17.对所述巡检集样本,进行改变曝光处理建立新的训练集样本,以模拟在不同状态下拍摄的图像数据;
18.对所述巡检集样本,进行添加噪点处理建立新的训练集样本,以模拟在不同状态下拍摄的图像数据。
19.根据本发明的一些实施例,所述对所述指示灯训练样本进行深度学习训练,得到训练权重,包括步骤:
20.对所述指示灯训练样本采用yolov5算法进行深度学习训练,设置epoch=300,batchsize=32,得到训练权重。
21.根据本发明的一些实施例,所述对所述图像数据进行色值筛选和二值化处理,包括步骤:
22.将v值大于80%且s值小于50%的像素点二值化处理为白点。
23.根据本发明的一些实施例,所述对所述图像数据进行色值筛选和二值化处理,所述指示灯亮位置显示为白块,包括步骤:
24.通过色值筛选,返回二值化处理的所述图像数据;
25.对所述图像数据进行白值扩张再收缩,消除所述指示灯内部及周围黑色色斑;
26.对所述图像数据收缩再扩张处理,以消除干扰噪点,处理后所述指示灯亮处灰度值大于0,显示为白块。
27.根据本发明的一些实施例,所述输出所有所述指示灯的亮灭状态,包括步骤:
28.按照从左到右,从上到下的顺序依次输出指示灯的亮灭状态。
29.第二方面,本发明提供了一种基于深度学习的净水厂配电房图像采集与识别系统,包括:
30.训练样本建立模块,用于对图片集的指示灯位置进行图像裁切并标定点位信息,并建立指示灯训练样本;
31.深度学习训练模块,与所述训练样本建立模块通信连接,所述深度学习训练模块用于对所述指示灯训练样本进行深度学习训练,得到训练权重;
32.图像数据获取模块,与所述深度学习训练模块通信连接,所述图像数据获取模块用于获取配电房的图像数据,并根据所述训练权重确定所有所述指示灯的位置和指示灯识别中心;
33.色域转换模块,与所述图像数据获取模块通信连接,所述色域转换模块用于对所述图像数据进行hsv色域转换处理,并获取所述指示灯识别中心的s-v值,对所述图像数据进行色值筛选和二值化处理,所述指示灯亮位置显示为白块;
34.指示灯状态输出模块,与所述色域转换模块通信连接,所述指示灯状态输出模块用于根据所有所述指示灯的位置信息和白块的位置信息,输出所有所述指示灯的亮灭状态。
35.第三方面,本发明提供了一种基于深度学习的净水厂配电房图像采集与识别系统,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,
所述处理器执行所述计算机程序时实现如第一方面中任意一项所述的基于深度学习的净水厂配电房图像采集与识别方法。
36.第四方面,本发明提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面中任意一项所述的基于深度学习的净水厂配电房图像采集与识别方法。
37.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
38.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中摘要附图要与说明书附图的其中一幅完全一致:
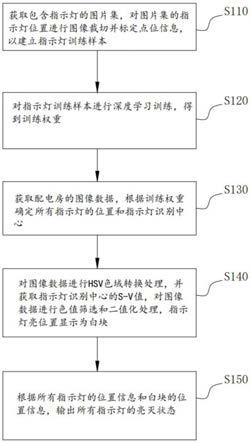
39.图1为本发明一个实施例提供的基于深度学习的净水厂配电房图像采集与识别方法的流程图;
40.图2为本发明另一个实施例提供的基于深度学习的净水厂配电房图像采集与识别方法的流程图。
具体实施方式
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
42.需要说明的是,虽然在系统示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于系统中的模块划分,或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
43.本发明提供了一种基于深度学习的净水厂配电房图像采集与识别方法,能够全天候实时监视配电房的运行数据,便于净水链设备正常可靠运行。相较于常规配电房采取人员巡检多次记录以及蜂鸣报警的方式,本发明能够极大的降低设备监视成本,降低设备运行的风险,能够及时发现设备运行异常,并对异常情况可以及时处理,减少可能出现的重大损失。
44.下面结合附图,对本发明实施例作进一步阐述。
45.参照图1,图1为本发明一个实施例提供的基于深度学习的净水厂配电房图像采集与识别方法的流程图;基于深度学习的净水厂配电房图像采集与识别方法包括但是不仅限于步骤s110至步骤s150。
46.步骤s110,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;
47.步骤s120,对指示灯训练样本进行深度学习训练,得到训练权重;
48.步骤s130,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;
49.步骤s140,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对
图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;
50.步骤s150,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。
51.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。基于深度学习的净水厂配电房图像采集与识别方法能够全天候实时监视配电房的运行数据,便于净水链设备正常可靠运行。相较于常规配电房采取人员巡检多次记录以及蜂鸣报警的方式,本发明能够极大的降低设备监视成本,降低设备运行的风险,能够及时发现设备运行异常,并对异常情况可以及时处理,减少可能出现的重大损失。
52.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本,包括步骤:对图片集的指示灯位置进行图像裁切,并标定指示灯四角的点位信息,以建立巡检集样本。
53.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。建立巡检集样本,至少包括以下步骤之一:对巡检集样本,进行透视拉伸处理建立新的训练集样本,以模拟在不同状态下拍摄的图像数据;对巡检集样本,进行改变曝光处理建立新的训练集样本,以模拟在不同状态下拍摄的图像数据;对巡检集样本,进行添加噪点处理建立新的训练集样本,以模拟在不同状态下拍摄的图像数据。
54.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信
息,输出所有指示灯的亮灭状态。对指示灯训练样本进行深度学习训练,得到训练权重,包括步骤:对指示灯训练样本采用yolov5算法进行深度学习训练,设置epoch=300,batchsize=32,得到训练权重。
55.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。对图像数据进行色值筛选和二值化处理,包括步骤:将v值大于80%且s值小于50%的像素点二值化处理为白点。
56.参照图2,图2为本发明另一个实施例提供的基于深度学习的净水厂配电房图像采集与识别方法的流程图;基于深度学习的净水厂配电房图像采集与识别方法包括但是不仅限于步骤s210至步骤s230。
57.步骤s210,通过色值筛选,返回二值化处理的图像数据;
58.步骤s220,对图像数据进行白值扩张再收缩,消除指示灯内部及周围黑色色斑;
59.步骤s230,对图像数据收缩再扩张处理,以消除干扰噪点,处理后指示灯亮处灰度值大于0,显示为白块。
60.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块,包括步骤:通过色值筛选,返回二值化处理的图像数据;对图像数据进行白值扩张再收缩,消除指示灯内部及周围黑色色斑;对图像数据收缩再扩张处理,以消除干扰噪点,处理后指示灯亮处灰度值大于0,显示为白块。
61.在一实施例中,基于深度学习的净水厂配电房图像采集与识别方法包括步骤:首先,获取包含指示灯的图片集,对图片集的指示灯位置进行图像裁切并标定点位信息,以建立指示灯训练样本;然后,对指示灯训练样本进行深度学习训练,得到训练权重;然后,获取配电房的图像数据,根据训练权重确定所有指示灯的位置和指示灯识别中心;其次,对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;最后,根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。输出所有指示灯的亮灭状态,包括步骤:按照从左到右,从上到下的顺序依次输出指示灯的亮灭状态。
62.本发明还提供了一种基于深度学习的净水厂配电房图像采集与识别系统,包括:
63.训练样本建立模块,用于对图片集的指示灯位置进行图像裁切并标定点位信息,并建立指示灯训练样本;
64.深度学习训练模块,与训练样本建立模块通信连接,深度学习训练模块用于对指示灯训练样本进行深度学习训练,得到训练权重;
65.图像数据获取模块,与深度学习训练模块通信连接,图像数据获取模块用于获取配电房的图像数据,并根据训练权重确定所有指示灯的位置和指示灯识别中心;
66.色域转换模块,与图像数据获取模块通信连接,色域转换模块用于对图像数据进行hsv色域转换处理,并获取指示灯识别中心的s-v值,对图像数据进行色值筛选和二值化处理,指示灯亮位置显示为白块;
67.指示灯状态输出模块,与色域转换模块通信连接,指示灯状态输出模块用于根据所有指示灯的位置信息和白块的位置信息,输出所有指示灯的亮灭状态。
68.本发明还提供了一种基于深度学习的净水厂配电房图像采集与识别系统,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上述的基于深度学习的净水厂配电房图像采集与识别方法。
69.处理器和存储器可以通过总线或者其他方式连接。
70.存储器作为一种非暂态计算机可读存储介质,可用于存储非暂态软件程序以及非暂态性计算机可执行程序。此外,存储器可以包括高速随机存取存储器,还可以包括非暂态存储器,例如至少一个磁盘存储器件、闪存器件、或其他非暂态固态存储器件。在一些实施方式中,存储器可选包括相对于处理器远程设置的存储器,这些远程存储器可以通过网络连接至该处理器。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
71.需要说明的是,本实施例中的基于深度学习的净水厂配电房图像采集与识别系统,可以包括有业务处理模块、边缘端数据库、服务端版本信息寄存器、数据同步模块,处理器执行计算机程序时实现如上述应用在基于深度学习的净水厂配电房图像采集与识别系统的基于深度学习的净水厂配电房图像采集与识别方法。
72.以上所描述的装置实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。
73.此外,本发明的一个实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机可执行指令,该计算机可执行指令被一个处理器或控制器执行,例如,被上述终端实施例中的一个处理器执行,可使得上述处理器执行上述实施例中的基于深度学习的净水厂配电房图像采集与识别方法。
74.本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统可以被实施为软件、固件、硬件及其适当的组合。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或
者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
75.以上是对本发明的较佳实施进行了具体说明,但本发明并不局限于上述实施方式,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变形或替换,这些等同的变形或替换均包含在本发明权利要求所限定的范围内。
76.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。