1.本发明涉及电子烹饪器具的控制方法技术领域,具体涉及一种烹饪状态监测方法、系统及存储介质。
背景技术:
2.用户使用电子烹饪器具进行烹饪时,通常通过获知烹饪过程的倒计时时间,即当前时刻距离烹饪结束的时间,以便能够掌握烹饪进程,进行相关事务安排。例如,在使用电饭煲进行蒸煮米饭时,用户需要获知米饭蒸煮结束的倒计时时间。现有技术中,为满足用户的上述需求,提供了倒计时时间显示功能。例如,在使用电饭煲进行米饭蒸煮时,在煮饭的后期(例如,在焖蒸阶段)增加倒计时功能,可见,现有技术中,通常通过时间和温度对烹饪器具内食材状态进行估测。然而,上述估测方法不能直接获取食材状态,难以对烹饪过程进行精准控制。
技术实现要素:
3.本发明要解决的技术问题是克服现有技术的不足,提供一种烹饪状态监测方法、系统及存储介质,通过3d结构光获取烹饪器具内食材的状态,从而对烹饪过程进行精准控制。
4.为了解决上述技术问题,本发明提出的技术方案为:
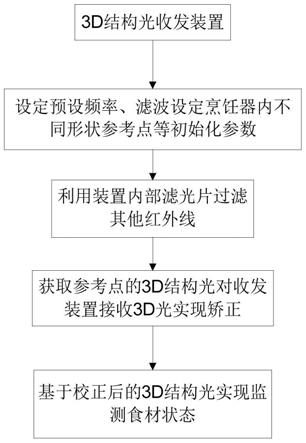
5.一种烹饪状态监测方法,包括如下步骤:s01、在烹饪器具内设置3d结构光收发装置,3d结构光收发装置内预设烹饪食材的最终状态图像信息;s02、采用3d结构光收发装置的投影设备向烹饪器具内的烹饪食材投射3d结构光,并通过3d结构光的图像采集装置采集烹饪食材的实时图像相位信息传输给3d结构光收发装置内置的处理单元;s03、处理单元根据烹饪食材的实时图像相位信息与烹饪食材的预设最终状态图像信息进行对比;s04、处理单元根据步骤s03中的对比结果实时控制烹饪器具的烹饪状态。
6.根据本发明的烹饪状态监测方法,通过3d结构光获取烹饪器具内高温背景下的食材的3d结构,在图像采集单元与处理单元和烹饪器具的控制装置的配合下实现对烹饪过程进行精准控制。
7.对于上述技术方案,还可进行如下所述的进一步的改进。
8.根据本发明的烹饪状态监测方法,在一个优选的实施方式中,在步骤s02中还包括子步骤s021:在3d结构光收发装置内设置预设频率,并在接收端设置滤光片,采用滤光片过滤掉预设频率之外的红外线。
9.因此,通过过滤掉预设频率之外的红外线,可以减少烹饪器具内的红外线对3d结构光收发装置干扰,从而克服高温背景影响3d结构光成像质量的问题。具体地,滤光片采用干涉原理,由于近红外频率内940nm处表面光较为薄弱,通过窄带滤光片将940nm以外的环境光剔除,只允许特定波段光信号通过,将其余波长光信号组合可得到无污染的识别信息,因此使得3d结构光的扫描效果更真实,具备更强的3d还原能力。
10.进一步地,在一个优选的实施方式中,在步骤s02中还包括如下子步骤:s022:在烹饪器具内设置两个以上参考点,在3d结构光收发装置内针对每一参考点设置预设形状和大小;s023:3d结构光收发装置获取参考点的形状和大小并将其与预设参考点的预设形状和大小进行比较以对参考点反馈的3d结构光进行校正;s024:3d结构光的图像采集装置基于校正后的3d结构光采集烹饪食材的实时图像相位信息传输给3d结构光收发装置内置的处理单元。
11.进一步地,在烹饪器具内设置多个参考点,每一参考点具有预设形状,处理单元根据参考点的预设形状图像信息对接收的3d结构光进行匹配对比校正,以获取更清晰的食材信息,从而能够进一步克服高温背景影响3d结构光成像质量的问题。
12.具体地,在一个优选的实施方式中,在烹饪器具的内壁上沿竖向设有一列参考点,各个参考点的形状相同,高度不同。
13.参考点的上述布置形式,能够有效提高接收的3d结构光的校正精度。
14.具体地,在一个优选的实施方式中,在烹饪器具的内壁上沿竖向设有一列以上参考点,每列之间参考点的形状相同,每列之内参考点的形状相同,各列参考点在平面上均匀分布。例如,当设置为两列时,两列参考点之间为180度,当设置为三列时,三列参考点之间为120度。
15.容易理解地,相比上述一列的布置形式,上述参考点采用多列均匀布置的形式,能够极大程度上提高接收的3d结构光的校正精度。
16.具体地,在一个优选的实施方式中,不同高度参考点的大小不同,从低到高,参考点的尺寸逐渐变小。
17.参考点的上述布置形式,显然能够有效提高3d结构光的校正精度。
18.具体地,在一个优选的实施方式中,参考点的形状包括三角形、正方形和五边形中的一种或者几种。
19.上述几种参考点的形状相对比较简单,易于设置和比对,因此使得校正简单便捷。
20.具体地,在一个优选的实施方式中,烹饪器具包括电饭煲。
21.对常见的和广泛应用的电饭煲实施烹饪状态控制方法,能够有效提高广大用户生活便捷性和体验感。
22.本发明第二方面的烹饪状态监测系统,实施如上述所述的烹饪状态监测方法,包括布置在烹饪器具内的3d结构光收发装置,3d结构光收发装置包括投影设备、图像采集装置和处理单元,处理单元分别与图像采集装置和烹饪器具的控制装置之间实现数据传输。
23.显然,本发明的烹饪状态监测系统,能够好好地实施上述监测方法,有效提高用户的生活便捷性和体验感。
24.本发明第三方面的存储介质,其存储有计算机程序,计算机程序由处理器运行时,执行如上述所述的烹饪状态监测方法。
25.相比现有技术,本发明的优点在于:通过3d结构光获取烹饪器具内高温背景下的食材的3d结构,在图像采集单元与处理单元和烹饪器具的控制装置的配合下实现对烹饪过程进行精准控制。
附图说明
26.在下文中将基于实施例并参考附图来对本发明进行更详细的描述。其中:
27.图1示意性显示了本发明实施例的烹饪状态监测方法的流程。
28.在附图中,相同的部件使用相同的附图标记。附图并未按照实际的比例绘制。
具体实施方式
29.下面将结合附图和具体实施例对本发明作进一步详细说明,但并不因此而限制本发明的保护范围。
30.图1示意性显示了本发明实施例的烹饪状态监测方法的流程。
31.实施例1
32.如图1所示,本发明实施例的烹饪状态监测方法,包括如下步骤:s01、在烹饪器具内设置3d结构光收发装置,3d结构光收发装置内预设烹饪食材的最终状态图像信息;s02、采用3d结构光收发装置的投影设备向烹饪器具内的烹饪食材投射3d结构光,并通过3d结构光的图像采集装置采集烹饪食材的实时图像相位信息传输给3d结构光收发装置内置的处理单元;s03、处理单元根据烹饪食材的实时图像相位信息与烹饪食材的预设最终状态图像信息进行对比;s04、处理单元根据步骤s03中的对比结果实时控制烹饪器具的烹饪状态。
33.根据本发明实施例的烹饪状态监测方法,通过3d结构光获取烹饪器具内高温背景下的食材的3d结构,在图像采集单元与处理单元和烹饪器具的控制装置的配合下实现对烹饪过程进行精准控制。
34.如图1所示,进一步地,本发明实施例的烹饪状态监测方法在步骤s02中还包括子步骤s021:在3d结构光收发装置内设置预设频率,并在接收端设置滤光片,采用滤光片过滤掉预设频率之外的红外线。因此,通过过滤掉预设频率之外的红外线,可以减少烹饪器具内的红外线对3d结构光收发装置干扰,从而克服高温背景影响3d结构光成像质量的问题。具体地,滤光片采用干涉原理,由于近红外频率内940nm处表面光较为薄弱,通过窄带滤光片将940nm以外的环境光剔除,只允许特定波段光信号通过,将其余波长光信号组合可得到无污染的识别信息,因此使得3d结构光的扫描效果更真实,具备更强的3d还原能力。
35.如图1所示,进一步地,本发明实施例的烹饪状态监测方法在步骤s02中还包括子步骤:s022:在烹饪器具内设置两个以上参考点,在3d结构光收发装置内针对每一参考点设置预设形状和大小;s023:3d结构光收发装置获取参考点的形状和大小并将其与预设参考点的预设形状和大小进行比较以对参考点反馈的3d结构光进行校正;s024:3d结构光的图像采集装置基于校正后的3d结构光采集烹饪食材的实时图像相位信息传输给3d结构光收发装置内置的处理单元。进一步地,在烹饪器具内设置多个参考点,每一参考点具有预设形状,处理单元根据参考点的预设形状图像信息对接收的3d结构光进行匹配对比校正,以获取更清晰的食材信息,从而能够进一步克服高温背景影响3d结构光成像质量的问题。
36.具体地,在本实施例中,在烹饪器具的内壁上沿竖向设有一列参考点,各个参考点的形状相同,高度不同。参考点的上述布置形式,能够有效提高接收的3d结构光的校正精度。具体地,在本实施例中,还可以在烹饪器具的内壁上沿竖向设有一列以上参考点,每列之间参考点的形状相同,每列之内参考点的形状相同,各列参考点在平面上均匀分布。例如,当设置为两列时,两列参考点之间为180度,当设置为三列时,三列参考点之间为120度。
容易理解地,相比上述一列的布置形式,上述参考点采用多列均匀布置的形式,能够极大程度上提高接收的3d结构光的校正精度。
37.具体地,在本实施例中,不同高度参考点的大小不同,从低到高,参考点的尺寸逐渐变小。参考点的上述布置形式,显然能够有效提高3d结构光的校正精度。具体地,在本实施例中,参考点的形状包括三角形、正方形和五边形中的一种或者几种。上述几种参考点的形状相对比较简单,易于设置和比对,因此使得校正简单便捷。
38.具体地,在本实施例中,烹饪器具包括电饭煲。对常见的和广泛应用的电饭煲实施烹饪状态控制方法,能够有效提高广大用户生活便捷性和体验感。具体地,采用本发明实施例的烹饪状态监测方法对电饭煲的烹饪状态进行监测的具体过程如下:
39.在电饭煲内设置3d结构光收发装置,具体地,3d结构光收发装置包括摄像机和至少一个发射座,一个发射座上设有一个发射头,摄像机与发射座并列设置在支座组件上,支座组件布置在电饭锅内壁上,3d结构光收发装置还包括内置的处理单元,在处理单元内预设米饭的最终形状和大小;
40.采用3d结构光收发装置的发射头向电饭煲内的烹饪米粒投射3d结构光,在处理单元内设置预设频率,并在靠近发射头的位置设置滤光片,采用滤光片过滤掉预设频率之外的红外线,将940nm以外的环境光剔除;
41.在电饭煲内壁上沿圆周方向均匀间隔设置三列参考点,在处理单元内针对每一参考点设置预设形状和大小,不同高度参考点的大小不同,从低到高,参考点的尺寸逐渐变小;通过发射头发射的3d结构光和摄像机的配合获取各参考点的形状和大小,并将其实时传输给处理单元与处理单元内各参考点的预设形状和大小进行比较,并根据比对结果实时调整发射头和摄像机的角度以对参考点反馈的3d结构光进行校正;摄像机基于校正后的3d结构光投射后采集烹饪米粒的实时形状和大小,并将全部数据传输至处理单元;
42.处理单元根据烹饪米粒的实时形状和大小与米饭的预设最终形状和大小进行对比,并根据对比结果实时调整电饭煲的烹饪时间和烹饪温度以获得口感更好的米饭,从而有效提高用户体验感。
43.其中,3d结构光收发装置内的摄像机也可以采用超广角相机,并且发射头采用垂直腔面发射激光器,用于发射散斑激光束,超广角相机和垂直腔面发射激光器并排设置,垂直腔面发射激光器的视场角覆盖超广角相机的视场角,超广角相机的光入射面与垂直腔面发射激光器的光出射面平行,或者超广角相机的光入射面与垂直腔面发射激光器的光出射面位于同一平面;并且采用准直器对散斑激光束进行准直,采用二维衍射光学器件对准直后的散斑激光束进行扩束并进行光斑复制,采用扩束透镜对扩束并进行光斑复制后的散斑激光束再次进行扩束,从而使得垂直腔面发射激光器具有足够大的视场角,以覆盖超广角相机的视场角,此外,使得垂直腔面发射激光器视场角变大后,仍然能具有较高的光斑密度,利于提高3d检测的精度及准确性。
44.实施例2
45.本发明实施例的烹饪状态监测系统,实施如上述所述的烹饪状态监测方法,包括布置在烹饪器具内的3d结构光收发装置,3d结构光收发装置包括投影设备、图像采集装置和处理单元,处理单元分别与图像采集装置和烹饪器具的控制装置之间实现数据传输。
46.显然,本发明的烹饪状态监测系统,能够好好地实施上述监测方法,有效提高用户
的生活便捷性和体验感。3d结构光收发装置光投影设备、摄像头、图像采集和处理系统。具体地,3d结构光收发装置的工作原理是通过近红外激光器向食材投射具有预设结构特征的光线,然后由内置的摄像头采集获取被拍摄食材的图像相位信息,然后通过处理单元将被拍摄食材的结构的变化转换成具体数据信息以获得被拍摄食材的三维结构信息。
47.实施例3
48.本发明实施例的存储介质,其存储有计算机程序,计算机程序由处理器运行时,执行如上述所述的烹饪状态监测方法。
49.根据上述实施例,可见,本发明涉及的烹饪状态监测方法、系统及存储介质,通过3d结构光获取烹饪器具内高温背景下的食材的3d结构,在图像采集单元与处理单元和烹饪器具的控制装置的配合下实现对烹饪过程进行精准控制。
50.虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。