1.本发明涉及海洋石油平台中的上部模块,尤其涉及一种海洋石油平台上部模块同步顶升方法。
背景技术:
2.随着世界经济的持续发展,国内外石油的需求量日益提升,陆地上的石油和天然气资源已经不能满足人类的需求,人们对石油和天然气的探索也逐渐从浅海延伸到深海,各种海洋石油平台不断向大型化和综合化发展,大型海洋平台的结构越来越复杂,上部模块的重量越来越大,所以上部模块的安装也变得越来越困难。
3.传统的模块安装大多采用吊装的方式,对上部模块的结构强度要求高,吊装的安装方式容易对上部模块的骨架造成损坏,同时需要在上部模块上制作额外的结构来满足吊装要求,工作周期长。
4.同步顶升技术采用底部顶升的方式,将上部模块顶升到一定高度后,进行石油平台的安装工作不需要在上部模块上设计额外的结构,可以保护上部模块结构,且效率较高,节约成本。模块顶升过程中,顶升点的选择和顶升同步方式严重影响顶升过程的安全性,因此急需一种可以合理的选择顶升点并进行高精度同步顶升的上部模块顶升方法。
技术实现要素:
5.本发明方法克服了已有技术的缺点,提供一种海洋石油平台上部模块同步顶升方法。
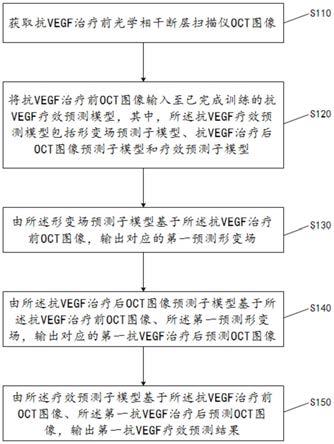
6.本发明一种海洋石油平台上部模块同步顶升方法,包括以下步骤:
7.步骤一:通过三维激光扫描仪拍摄上部模块图像并输入计算机,进行模型逆向建模与材料定义,具体步骤为:
8.第一步,通过三维激光扫描仪扫描待顶升上部模块的三维点云,并导入计算机并进行降噪等预处理工作。
9.第二步,将所述的经过预处理的模块点云通过leica cyclone软件进行拟合得到初始三维模型,并保存为sldasm文件。
10.第三步,将所述的sldasm格式的文件导入solidworks软件中,通过solidworks软件中的定义材料功能,定义上部模块模型中的各部分结构的材料,将完成各部分结构材料定义的上部模块三维模型保存为x_t格式文件。
11.步骤二:根据实际工况需求,建立上部模块同步顶升方案的拓扑优化数学模型,对顶升点的数量和位置进行优。
12.步骤三:以步骤二确定的最优化模型为依据,在ansys worksbench中进行迭代计算,直至结果收敛,得到优化后的顶升点数量和顶上点位置的最优解,具体步骤如下:
13.第一步,将步骤一得到的x_t格式文件导入ansys workbench软件,对上部模块三维模分别进行静力学和动力学分析,提取优化目标和优化函数的初始值。
14.第二步:根据约束条件和初始值采用粒子群算法进行迭代,经过多次迭代得到一组固定解,即为最优顶升点数量和最优顶升点位置。
15.步骤四:在每台顶升装置的每个液压油缸的外侧安装拉丝传感器,用于检测液压油缸活塞杆的位移,与每个液压油缸的无杆腔连接有压力传感器,用于检测液压油缸的压力,所述的顶升装置由四个液压油缸组成。
16.步骤五:在需要顶升的上部模块底部布置顶升装置并对每台顶升装置的拉丝传感器读数进行初始化操作,具体操作如下:
17.在步骤三求得的上部模块最优顶升点位置处布置顶升装置,计算机控制各顶升装置开始工作,将上部模块顶升2-5cm,将此时刻各拉丝传感器读数设置为上部模块顶升零点位置。
18.步骤六:调整每台顶升装置的四个液压油缸的压力,使每台顶升装置的四个液压油缸受力均衡,并使每台顶升装置同步顶升,具体操作步骤如下:
19.第一步,通过每台顶升装置的四个压力传感器读取该顶升装置的四个液压油缸的压力,通过计算机调整各液压油缸压力,使四个液压油缸压力相等。
20.第二步,设定每台顶升装置的每个液压油缸的活塞杆的初始速度,在每台顶升装置中任意取一个拉丝传感器读数作为该顶升装置的顶升高度读数,调整各顶升装置的顶升速度。
21.第三步,以5s为一个工作周期,重复第一步和第二步直到顶升工作完成。
22.本发明的有益效果是自适应性强,计算速度快、精度高,能够在实际工况下对顶升点数量和位置进行优化,符合实际需求,同时顶升力分配合理,避免出现液压缸受力差过大使液压缸使用寿命缩短的情况,顶升同步精度高,避免由于顶升不同步产生倾覆等危险工况。
附图说明
23.图1为海洋石油平台上部模块同步顶升方法流程图;
24.图2为4个顶升点情况下同步顶升装置布置示意图;
25.图3为4各顶升点情况下同步顶升装置顶升高度和顶升速度示意图;
26.图2中:1-上部模块;2-顶升装置;
具体实施方式
27.下面结合附图和具体实施例对本发明加以详细说明:
28.以下是本发明的具体实施例,对本发明的技术方案作进一步的描述:
29.步骤一:通过三维激光扫描仪拍摄上部模块图像并输入计算机,进行模型逆向建模与材料定义,具体步骤为:
30.第一步,通过三维激光扫描仪扫描待顶升上部模块的三维点云,并导入计算机并进行降噪等预处理工作。
31.第二步,将所述的经过预处理的模块点云通过leica cyclone软件进行拟合得到初始三维模型,并保存为sldasm文件。
32.第三步,将所述的sldasm格式的文件导入solidworks软件中,通过solidworks软
件中的定义材料功能,定义上部模块模型中的各部分结构的材料,将完成各部分结构材料定义的上部模块三维模型保存为x_t格式文件。
33.步骤二:根据实际工况需求,建立上部模块同步顶升方案的拓扑优化数学模型,对顶升点的数量和位置进行优,拓扑优化模型如下:
34.优化目标为上部模块在顶升过程的最小应变能,单位为j,优化目标函数可表示为:
[0035][0036]
式中,n为顶升点数量,为顶升点位置的三维向量,所述的n和为拓扑优化数学模型的优化变量。ni为第i个顶升点的内力,li为顶升点作用高度,其中i=1,2,
…
,n;
[0037]
并设约束条件为:
[0038][0039]
式中,fi为第i个顶升点的实际作用力,单位为n,[fi]为第i个作用点的许用作用力,单位为n,n
min
、n
max
分别为上部模块允许的最小和最大顶升点数量。
[0040]
步骤三:以步骤二确定的最优化模型为依据,在ansys worksbench中进行迭代计算,直至结果收敛,得到优化后的顶升点数量和顶上点位置的最优解,具体步骤如下:
[0041]
第一步,将步骤一得到的x_t格式文件导入ansys workbench软件,对上部模块三维模分别进行静力学和动力学分析,提取优化目标和优化函数的初始值。
[0042]
第二步:根据约束条件和初始值采用粒子群算法进行迭代,经过多次迭代得到一组固定解,即为最优顶升点数量和最优顶升点位置。
[0043]
步骤四:在每台顶升装置的每个液压油缸的外侧安装拉丝传感器,用于检测液压油缸活塞杆的位移,与每个液压油缸的无杆腔连接有压力传感器,用于检测液压油缸的压力,所述的顶升装置由四个液压油缸组成。
[0044]
步骤五:在需要顶升的上部模块底部布置顶升装置并对每台顶升装置的拉丝传感器读数进行初始化操作,具体操作如下:
[0045]
在步骤三求得的上部模块最优顶升点位置处布置顶升装置,计算机控制各顶升装置开始工作,将上部模块顶升2-5cm,将此时刻各拉丝传感器读数设置为上部模块顶升零点位置。
[0046]
步骤六:调整每台顶升装置的四个液压油缸的压力,使每台顶升装置的四个液压油缸受力均衡,并使每台顶升装置同步顶升,具体操作步骤如下:
[0047]
第一步,通过每台顶升装置的四个压力传感器读取该顶升装置的四个液压油缸的压力分别为p1、p2、p3、p4,计算该顶升装置的平均压力p0=(p1 p2 p3 p4)/4,分别对各液压油缸进行加压或者减压压力令p1=p2=p3=p4=p0。
[0048]
第二步,设定每台顶升装置的每个液压油缸的活塞杆的初始速度为v0,在每台顶升装置中任意取一个拉丝传感器读数作为该顶升装置的顶升高度读数,以顶升点数量为4的情况为例,读取四台顶升装置的顶升高度读数分别为h1、h2、h3、h4,单位mm,分别以h1、h2、h3、h4随时间的变化率作为四台顶升装置的顶升速度v1、v2、v3、v4,单位mm/s,比较h1、h2、h3、
h4的大小,取h1、h2、h3、h4中最大的数,赋值给参数h
max
,调整各顶升装置的顶升速度为:
[0049][0050]
式中:δv1=k(h
1-h
max
),δv2=k(h
2-h
max
),δv3=k(h
3-h
max
),δv4=k(h
4-h
max
),k为速度系数取0~1。
[0051]
第三步,以5s为一个工作周期,重复第一步和第二步直到顶升工作完成。
[0052]
本发明自适应性强,计算速度快、精度高,能够在实际工况下对顶升点数量和位置进行优化,顶升力分配合理,顶升同步精度高。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。