技术特征:
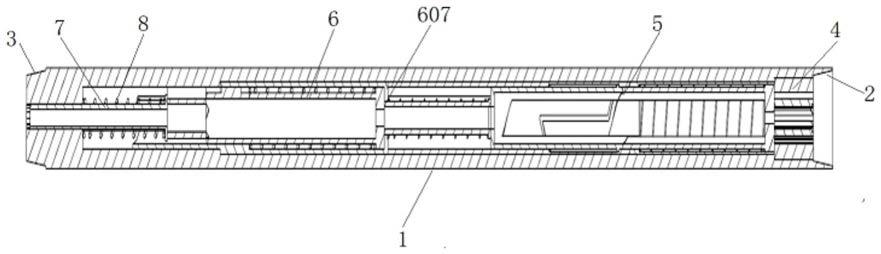
1.一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:包括钻杆本体,所述钻杆本体至少设置有两个,钻杆本体两端为开口状,所述钻杆本体包括套管(1)、第一接头(2)和第二接头(3),套管(1)为两端开口的空心圆柱管,第一接头(2)、第二接头(3)分别固定安装在套管(1)的两端,第一接头(2)的内壁预留有内螺纹,第二接头(3)的外侧预留有与第一接头(2)内螺纹契合的外螺纹,两个所述钻杆本体通过第一接头(2)和第二接头(3)正反对接,套管(1)内壁沿其长度方向上预留有卡槽,套管(1)的内部顺序安装有芯轴(7)、伸长机构(6)、触发机构(5)和棘轮锁紧模块(4),其中,芯轴(7),所述芯轴(7)活动安装在钻杆本体的内部,用于对接另一个钻杆本体;伸长机构(6),所述伸长机构(6)和芯轴(7)抵触安装,伸长机构(6)驱使芯轴(7)伸出或退回钻杆本体;触发机构(5),所述触发机构(5)与转机伸长杆抵触安装,触发机构(5)驱使伸长机构(6)前推芯轴(7);棘轮锁紧模块(4),所述芯轴(7)固定对接相邻钻杆本体内的棘轮锁紧模块(4),棘轮锁紧模块(4)用于相邻的两个钻杆本体周向和轴向锁死;所述芯轴(7)、伸长机构(6)和触发机构(5)上均设置有弹簧复位机构。2.根据权利要求1所述的一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:所述棘轮锁紧模块(4)、触发机构(5)、伸长机构(6)和芯轴(7)均与钻杆本体构成拆卸结构。3.根据权利要求2所述的一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:所述棘轮锁紧模块(4)包括棘轮外壳(401)、棘爪(402)和棘轮(403),棘轮外壳(401)为空心管状,且棘轮外壳(401)和套管(1)位于第一接头(2)的一端螺纹连接,棘轮外壳(401)的内壁上安装有棘爪(402),棘爪(402)和棘轮外壳(401)内部的棘轮(403)构成棘轮结构,棘轮外壳(401)和套管(1)的螺纹啮合方向与第一接头(2)和第二接头(3)的螺纹啮合方向相反,棘轮(403)的转动方向与棘轮外壳(401)和套管(1)的螺纹啮合方向相反,棘轮(403)的内壁上沿其长度方向上预留有花键槽,所述芯轴(7)的侧面预留有与棘轮(403)花键槽形状契合的花键凸块。4.根据权利要求1所述的一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:所述触发机构(5)包括第一衬套(501)、第一滑爪(502)、第二滑爪(503)、第一滑爪导轨(504)、第二滑爪导轨(505)、第一弹簧(506)、连接杆(507)和第二弹簧(508),第一衬套(501)为空心管状,第一衬套(501)的侧面沿其长度方向长设置有与钻杆本体内壁卡槽契合的卡块,第一滑爪(502)和第二滑爪(503)位于第一衬套(501)内部,第一滑爪(502)和第二滑爪(503)由一个空心圆柱体分割而成,第一滑爪(502)和第二滑爪(503)的相对面上分别对称预留有弧度为四分之一圆周的延长片,第一滑爪(502)的延长片之间构成两个与第二滑爪(503)形状契合的第二滑爪导轨(505),第二滑爪(503)的延长片之间构成两个与第一滑爪(502)形状契合的第一滑爪导轨(504),第一滑爪(502)上的两片延长片端口设为倾斜状且倾斜方向相反,第二滑爪(503)上的两片延长片端口设为倾斜状且倾斜方向相反,第一滑爪(502)上套接有第一弹簧(506),第二滑爪(503)的延长片外侧设置有定位第一弹簧(506)的凸块,第二滑爪(503)的另一端中间位置设置有连接杆(507),连接杆(507)上套接有第二弹簧(508)。
5.根据权利要求4所述的一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:所述第一衬套(501)包括两片沿第一衬套(501)长度方向分割的半圆形管状件。6.根据权利要求1所述的一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:所述伸长机构(6)包括第二衬套(601)、推杆(602)、第三滑爪(603)、第三弹簧(604)、推杆转动齿(605)、第三滑爪转动齿(606)、第二衬套通孔(607)、第四滑爪(608)、推杆定位块(609)、第一推杆定位块导轨(6010)、第二推杆定位块导轨(6011),第二衬套(601)为空心管状,第二衬套(601)的侧面沿其长度方向长设置有与钻杆本体内壁卡槽契合的卡块,第二衬套(601)面朝连接杆(507)的一端预留有与连接杆(507)直径尺寸契合的第二衬套通孔(607),第二衬套(601)的内部安装有推杆(602),推杆(602)外侧端口处对称设置有推杆定位块(609),推杆(602)上套接有第三弹簧(604),第二衬套(601)的另一端沿其长度方向上对称设置有两个第四滑爪(608),两个所述第四滑爪(608)之间构成与推杆定位块(609)宽度契合的第一推杆定位块导轨(6010),第四滑爪(608)的外部端口上预留有第二推杆定位块导轨(6011),第二推杆定位块导轨(6011)的深度小于第一推杆定位块导轨(6010)的深度,推杆(602)背向连接杆(507)的一端设置有第三滑爪(603),推杆(602)和第三滑爪(603)的相对面上分别设置有推杆转动齿(605)和第三滑爪转动齿(606),推杆(602)和第三滑爪(603)通过推杆转动齿(605)和第三滑爪转动齿(606)构成周向转动结构。7.根据权利要求1所述的一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,其特征在于:所述芯轴(7)上套接有第四弹簧(8),第四弹簧(8)尺寸大于钻杆本体位于芯轴(7)端开口尺寸。
技术总结
本发明公开了一种煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,涉及钻具技术领域,包括钻杆本体,所述钻杆本体至少设置有两个,套管的内部顺序安装有,芯轴,所述芯轴活动安装在钻杆本体的内部,用于对接另一个钻杆本体;伸长机构,所述伸长机构和芯轴抵触安装,伸长机构驱使芯轴伸出或退回钻杆本体;触发机构,触发机构驱使伸长机构前推芯轴;棘轮锁紧模块,棘轮锁紧模块用于相邻的两个钻杆本体周向和轴向锁死。该煤矿钻孔机器人的棘轮式自动装卸正反转通讯钻杆,可实现钻杆正反转进行缓冲松动处理抱钻事故,同时钻机也可自动装卸钻杆来实现钻杆间通讯传递,为真正实现现场全程无人化钻孔施工提供技术支撑,并且钻机应用该钻杆时脱离了人工辅助操作,减低了工人的劳动强度。强度。强度。
技术研发人员:司垒 张鹏辉 王忠宾 魏东 谭超 闫海峰 刘新华 戴剑博 顾进恒 邹筱瑜
受保护的技术使用者:中国矿业大学
技术研发日:2022.03.10
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。