1.本发明属于计算机视觉与数字图像处理的交叉技术领域,涉及视觉测量、航天器姿态测量等方面中的图像光斑质心定位方法,具体为一种基于相关法阈值迭代的拟合质心亚像素定位方法。
背景技术:
2.在视觉测量、航天器姿态测量等领域,图像光斑的定位精度是影响整个系统测量精度的一个重要因素。受到光学系统以及ccd制造工艺的影响,图像分辨率不能无限制提高,想通过硬件的方法来提高像素分辨率进一步提高定位精度有局限性。通过图像处理设计软件的方法细分光斑像素是一个行之有效的方法。
3.目前图像光斑的亚像素定位方法主要分为基于图像边缘和基于图像灰度两种。基于边缘的方法主要有椭圆拟合法、hough变化法等。基于灰度的方法主要有灰度质心法、灰度加权质心法、高斯曲面拟合法、抛物面拟合法以及带阈值的质心法等。
4.基于图像边缘的方法需要光斑图像有一定的尺寸,还要有较明显的边缘特征来提取边缘信息,这种方法一般适用于对焦成像。目前使用的光斑属于离焦成像,其光斑灰度中心较亮边缘较暗,不适合用基于边缘的方法。
5.基于图像灰度的方法中,灰度质心法和灰度加权质心法这些灰度矩法都没有考虑图像的灰度分布规律,定位中心精度不高。高斯曲面拟合法将光斑图像的灰度分布近似当作高斯分布处理,利用高斯曲线对分布进行拟合,这种方法在光斑分布近似为高斯分布时精度较高,但是当光斑的分布与高斯分布相差较大时,质心的计算精度就不高。抛物面拟合法类似与高斯曲面拟合,计算速度比高斯分布快,计算精度和高斯分布差不多。带阈值的质心法,针对同一场景多次拍摄的不同图像,计算的阈值相差不大,但是灰度分布会有不同,计算出的质心重复性精度不高。
技术实现要素:
6.目前,图像光斑的亚像素定位方法存在如下不足:
7.1、光斑为离焦图像,边缘模糊。基于图像边缘的方法需要有较明显的边缘特征,本发明使用的光斑为离焦图像,灰度中心较亮边缘较暗,不适合用基于边缘的方法。
8.2、灰度质心法和灰度加权质心法这些灰度矩法没有考虑图像的灰度分布规律,定位中心精度不高。
9.3、光斑分布受环境影响,不可能全部近似为高斯分布。当光斑的分布与高斯分布相差较大时,高斯拟合法提取的质心计算精度就不高。
10.4、同一场景多次拍摄的不同图像灰度分布变化较大。带阈值的质心法,计算的阈值相差不大,当灰度分布变化较大时计算出的质心重复性精度不高。
11.基于现有技术存在的上述缺点,本发明目的是提出一种基于相关法阈值迭代的拟合质心亚像素定位方法。
12.本发明是采用如下技术方案实现的:
13.一种基于相关法阈值迭代的拟合质心亚像素定位方法,包括如下步骤:
14.步骤(1)、获取测试图像:固定相机,点亮led灯,调节曝光使拍摄得到的led图像为不饱和图像。
15.步骤(2)、提取图像中的光斑区域。
16.步骤(3)、计算初始阈值
17.初始的阈值计算是将光斑有效区域边缘的像素灰度值取均值。
18.步骤(4)、双线性插值细分像素
19.采用双线性插值算法细分像素,增加光斑中心区域的有效像素,采用如式(1)的插值公式:
20.f(u,v)=(1-v j)(1-u-i)f(i,j) (1-v j)(u-i)f(i 1,j) (v-j)(1-u i)f(i,j 1) (v-j)(u-i)f(i 1,j 1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
21.式(1)中(u,v)(u∈(i,i 1),v∈(j,j 1))为插值点的坐标,f(u,v)为(u,v)坐标的灰度值;插值完得到17
×
17的光斑区域。
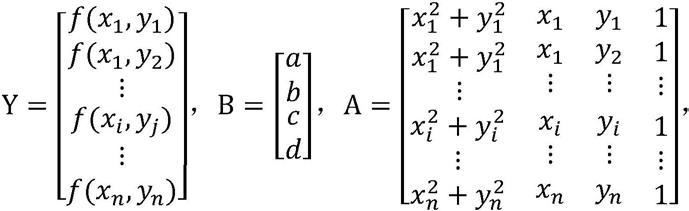
22.步骤(5)、初步拟合基于阈值的抛物面曲面:
23.首先认为光斑分布符合抛物面方程,抛物面公式如下式(2)所示
[0024][0025]
式中,a,b,c,d为待求系数,令
[0026][0027]
根据式(2)得到方程组如式(3):
[0028]
y=a*b
ꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0029]
根据式(3)的方程组利用最小二乘法,得到待求的系数矩阵b如下式(4):
[0030][0031]
式(4)中为b的最小二乘解,即为抛物面曲面方程的系数矩阵,a
是a的广义逆矩阵;
[0032]
通过式(4)求得的系数矩阵得到抛物面曲面方程如式(5):
[0033]
即得到拟合的光斑曲面方程。
[0034]
步骤(6)、计算相关系数
[0035]
利用步骤(5)得到的曲面方程和光斑的灰度分布求相关系数,公式如下式(6):
[0036][0037]
式(6)中g为光斑图像的灰度分布,f为步骤(5)拟合的光斑曲面方程,和分别是f(u,v)和g的均值,ρ值的范围是[-1,1];相关系数ρ越大说明步骤(5)拟合的曲面与光斑的灰度分布越接近。
[0038]
步骤(7)、判断相关系数
[0039]
当步骤(6)中ρ>0.9时,跳到步骤(8);当步骤(6)中ρ≤0.9时,更新阈值,重复上述步骤(5)和步骤(6)。
[0040]
步骤(8)、得到质心坐标
[0041]
根据步骤(7)得到的最优曲面结合式(5)计算质心坐标如下式(6)和式(7)所示:
[0042][0043][0044]
相关系数是衡量数据之间相关程度的一个指标,一般情况下,相关系数越大表明两个量之间的相关程度就越高。本发明将抛物面拟合和相关系数结合来更新迭代阈值,能得到与光斑图像最接近的曲面方程。相比较与现有的曲面拟合方法,他们不分析光斑图像真实的灰度分布,直接使用通用的点扩散函数,拟合出的曲面与真实光斑图像差异较大,本发明拟合的曲面与光斑图像相似性更高,求得的质心精度也就更高。
[0045]
本发明方法是针对离焦成像系统拍摄得到的光斑图像,图像的特点是在ccd探测器上形成模糊的散焦图像,增大了光斑图像的尺寸,保留了光斑图像的灰度信息。
[0046]
本发明设计合理,在分析现有方法的基础上,采用基于阈值的抛物面拟合曲面,剔除背景噪声的同时提高计算效率,并提高了算法的抗干扰性;再将拟合的抛物面和相关系数结合,通过更新迭代阈值方法显著提高质心的定位精度。本发明的质心的定位精度达到0.01个像素,具有很好的实际应用价值。
附图说明
[0047]
图1表示本发明的质心计算u方向坐标示意图。
[0048]
图2表示本发明的质心计算v方向坐标示意图。
[0049]
图3表示本发明方法的流程示意图。
具体实施方式
[0050]
下面结合附图对本发明的具体实施例进行详细说明。
[0051]
一种基于相关法阈值迭代的拟合质心亚像素定位方法,包括如下步骤:
[0052]
步骤(1)、获取测试图像:固定相机,点亮led灯,调节曝光使拍摄得到的led图像为不饱和图像。
[0053]
步骤(2)、提取图像中的光斑区域;采用类似于形态学、目标形状筛选或者阈值分
割等方法,获得图像中的目标光斑区域。
[0054]
步骤(3)、计算初始阈值
[0055]
步骤(2)中获取的光斑有效区域包含5
×
5的像素,这部分区域包含背景噪声与真实的光斑分布,将其全部纳入计算会影响精度,设置阈值来剔除背景噪声,降低背景部分引起的误差。初始的阈值计算是将光斑有效区域边缘的像素灰度值取均值。
[0056]
步骤(4)、双线性插值细分像素
[0057]
目标光斑包含的像素太少,充分利用现有的灰度信息,采用双线性插值算法细分像素(具体计算参考现有技术文献,王广君,房建成.一种星图识别的星体图像高精度内插算法[j].北京航空航天大学学报,2005,31(05):566-569.),增加光斑中心区域的有效像素,采用如式(1)的插值公式:
[0058]
f(u,v)=(1-v j)(1-u-i)f(i,j) (1-v j)(u-i)f(i 1,j) (v-j)(1-u i)f(i,j 1) (v-j)(u-i)f(i 1,j 1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0059]
式(1)中,(u,v)(u∈(i,i 1),v∈(j,j 1))为插值点的坐标,f(u,v)为(u,v)坐标的灰度值;插值完得到17
×
17的光斑区域。
[0060]
步骤(5)、初步拟合基于阈值的抛物面曲面:
[0061]
首先认为光斑分布符合抛物面方程,抛物面公式如下式(2)所示
[0062][0063]
式中a,b,c,d为待求系数,令
[0064][0065]
根据式(2)得到方程组如式(3):
[0066]
y=a*b
ꢀꢀꢀꢀꢀꢀ
(3)
[0067]
根据式(3)的方程组利用最小二乘法,得到待求的系数矩阵b如下式(4):
[0068][0069]
式(4)中为b的最小二乘解,即为抛物面曲面方程的系数矩阵,a
是a的广义逆矩阵;
[0070]
通过式(4)求得的系数矩阵得到抛物面曲面方程如式(5):
[0071][0072]
即得到拟合的光斑曲面方程。
[0073]
步骤(6)、计算相关系数
[0074]
利用步骤(5)得到的曲面方程和光斑的灰度分布求相关系数,公式如下式(6):
[0075][0076]
式(6)中g为光斑图像的灰度分布,f为步骤(5)拟合的光斑曲面方程,和分别是f(u,v)和g的均值,ρ值的范围是[-1,1];相关系数ρ越大说明步骤(5)拟合的曲面与光斑的灰度分布越接近。
[0077]
步骤(7)、判断相关系数
[0078]
当步骤(6)中ρ>0.9时,跳到步骤(8);当步骤(6)中ρ≤0.9时,更新阈值,重复上述步骤(5)和步骤(6)。
[0079]
步骤(8)、得到质心坐标
[0080]
根据步骤(7)得到的最优曲面结合式(5)计算质心坐标如下式(6)和式(7)所示:
[0081][0082][0083]
本发明所述的基于相关法阈值迭代的拟合质心亚像素定位方法,首先本算法引入相关系数,将拟合的曲面和真实的灰度分布进行相关计算,通过迭代得到与灰度分布最相近的曲面方程,显著提高了定位精度;其次针对现有的基于阈值的算法,本发明在基于阈值的基础上更新迭代阈值,得到最合适的阈值,尽可能排除背景对精度的影响,抗干扰能力强;最后,针对现有的高斯曲面拟合算法速度较慢,本发明提高效率采用抛物面拟合,有效提高了计算速率。本发明通过将抛物面拟合曲面与相关系数结合来更新迭代阈值,提高定位精度的同时提高了计算的效率。
[0084]
最后,验证本发明的精度。在实验中,采用basler a102f工业相机,其分辨率为1392
×
1040,配上12mm焦距的镜头分别在5m、10m以及12m的位置上测试本发明靶点光斑定位算法的精度。
[0085]
点亮靶点,在不同距离调节相机曝光得到不饱和光斑后,连续拍摄100张图像,用现有的方法和本发明方法分别计算质心,并求100个质心的标准差(std),发现本发明方法的质心定位精度更高,质心定位比较结果如下表1。本发明的质心计算u方向坐标如图1,v方向坐标如图2。
[0086]
表1质心定位结果比较(单位为pixel)
[0087]
5m(x,y)10m(x,y)12m(x,y)质心法(0.0047,0.0046)(0.0065,0.0064)(0.007,0.0071)加权质心法(0.0042,0.0043)(0.0062,0.0061)(0.0068,0.0067)高斯曲面拟合法(0.004,0.0041)(0.0059,0.0057)(0.0063,0.0064)抛物面拟合法(0.0041,0.004)(0.0059,0.0058)(0.0062,0.0063)带阈值的抛物面拟合法(0.0039,0.0037)(0.0052,0.0051)(0.0059,0.0058)本发明(0.0033,0.0034)(0.0041,0.004)(0.0053,0.0054)
[0088]
由表1可以发现,本发明质心定位精度比现有算法精度高,由图1和图2可以发现本发明的重复定位精度达到0.01像素。
[0089]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照本发明实施例进行了详细说明,本领域的普通技术人员应当理解,本发明方法的保护范围不局限应用于质心提取,对本发明的技术方案进行修改或者等同替换,类似的设备中设计到质心提取无论是等同变换或改进,都不脱离本发明的技术方案的精神和范围,其均应涵盖本发明的权利要求保护范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。