技术特征:
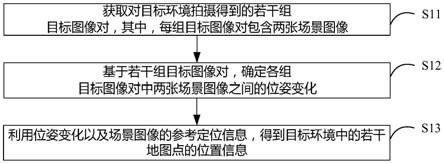
1.一种地图构建方法,其特征在于,包括:获取对目标环境拍摄得到的若干组目标图像对,其中,每组所述目标图像对包含两张场景图像;基于所述若干组目标图像对,确定各组所述目标图像对中两张场景图像之间的位姿变化;利用所述位姿变化以及所述场景图像的参考定位信息,得到所述目标环境中的若干地图点的位置信息,其中,所述参考定位信息是利用预设定位方式对所述场景图像定位得到的,所述地图点是所述目标环境中与所述若干组目标图像对中的图像点对应的空间点。2.根据权利要求1所述的方法,其特征在于,所述利用所述位姿变化以及所述场景图像的参考定位信息,得到所述目标环境中的若干地图点的位置信息,包括:利用所述位姿变化,确定各所述场景图像的目标位姿,其中,所述目标位姿包括目标旋转和目标平移;利用所述目标位姿,确定所述目标环境中与所述场景图像对应的若干地图点的位置信息;其中,所述目标旋转、目标平移和所述地图点的位置信息中的至少一者还利用所述参考定位信息确定的。3.根据权利要求2所述的方法,其特征在于,所述位姿变化包括第一旋转变化;所述利用所述位姿变化,确定各所述场景图像的目标位姿,包括:初始化所述若干组目标图像对中的所述场景图像的候选旋转;利用第一优化因子对所述候选旋转进行优化,得到各所述场景图像经优化的候选旋转,其中,所述第一优化因子包括所述第一旋转变化,或者包括所述第一旋转变化和所述参考定位信息中所述场景图像的参考旋转;将所述场景图像经优化的候选旋转作为所述场景图像的目标旋转;或者迭代执行所述利用第一优化因子对所述候选旋转进行优化,得到各所述场景图像经优化的候选旋转,在满足预设迭代条件后,将所述场景图像当前经优化的候选旋转作为所述场景图像的目标旋转。4.根据权利要求3所述的方法,其特征在于,所述利用第一优化因子对所述候选旋转进行优化,得到各所述场景图像经优化的候选旋转,包括:基于所述第一旋转变化和当前所述候选旋转,确定各所述目标图像对的旋转变化偏移量,其中,所述旋转变化偏移量表示第一旋转变化与第二旋转变化之间的偏移量,所述第二旋转变化是利用所述目标图像对的当前所述候选旋转确定的;利用所述旋转变化偏移量确定旋转修正量,或者利用所述旋转变化偏移量以及各所述场景图像的参考旋转偏移量,确定旋转修正量,其中,所述场景图像的参考旋转偏移量表示所述场景图像的当前所述候选旋转与所述场景图像的参考旋转之间的偏移量;利用所述场景图像的旋转修正量与当前所述候选旋转,得到所述场景图像经优化的所述候选旋转。5.根据权利要求2至4任一项所述的方法,其特征在于,所述利用所述位姿变化,确定各所述场景图像的目标位姿,包括:初始化所述场景图像的目标平移;
利用第二优化因子,对各所述场景图像的目标平移进行优化,其中,所述第二优化因子包括以下至少一者:各所述目标图像对的相对相机中心的位移方向、各地图点在各所述场景图像中对应的图像点的特征射线方向、所述参考定位信息中各所述场景图像的参考平移。6.根据权利要求5所述的方法,其特征在于,所述利用第二优化因子,对各所述场景图像的目标平移进行优化,包括:利用各所述目标图像对的位移方向差异、各所述地图点在各所述场景图像的射线方向差异、各所述场景图像的平移差异,建立第二优化方程,求解得到各所述场景图像经优化的目标平移;其中,所述目标图像对的位移方向差异为所述目标图像对的所述相对相机中心的位移方向与参考位移方向之间的差异,所述参考位移方向是利用所述目标图像对的场景图像的当前所述目标平移得到的;所述地图点在所述场景图像的射线方向差异为所述地图点在所述场景图像中对应的所述特征射线方向与参考射线方向之间的差异,所述参考射线方向是利用所述场景图像的当前所述目标平移和所述地图点的当前位置确定的;所述场景图像的平移差异为所述场景图像的当前所述目标平移与所述场景图像的所述参考平移之间的差异。7.根据权利要求6所述的方法,其特征在于,所述第二优化方程使得:各所述目标图像对的位移方向差异、各所述地图点在各所述场景图像的射线方向差异、各所述场景图像的平移差异的加权结果满足预设优化条件。8.根据权利要求5至7任一项所述的方法,其特征在于,所述位姿变化还包括平移变化,目标图像对的位移变化为从所述目标图像对中的第一场景图像平移至所述目标图像对中的第二场景图像产生的变化;在所述利用第二优化因子,对各所述场景图像的目标平移进行优化之前,所述方法还包括:利用所述目标图像对中的所述第一场景图像的目标旋转、以及所述目标图像对的所述位移变化,得到所述目标图像对的相对相机中心的位移方向;和/或,利用所述场景图像的目标旋转、以及所述地图点在所述场景图像中对应的图像点的位置信息,得到所述地图点在所述场景图像中对应的图像点的特征射线方向。9.根据权利要求2至8任一项所述的方法,其特征在于,所述利用所述目标位姿,确定所述目标环境中与所述场景图像对应的若干地图点的位置信息,包括:利用所述目标位姿,得到所述若干地图点的位置信息;利用第三优化因子,对所述若干地图点的位置信息进行优化,以得到所述若干个所述地图点经优化的位置信息,其中,所述第三优化因子包括以下至少一者:各所述地图点在各所述场景图像中的投影点误差、所述参考定位信息中各所述场景图像的参考旋转、所述参考定位信息中各所述场景图像的参考平移。10.根据权利要求9所述的方法,其特征在于,所述利用第三优化因子,对所述若干地图点的位置信息进行优化,包括:利用所述地图点在各所述场景图像中的投影点误差、各所述场景图像的所述目标旋转与所述参考旋转之间的差异、各所述场景图像的所述目标平移与所述参考平移之间的差异,建立第三优化方程以对所述地图点的位置信息进行优化。
11.根据权利要求1至10任一项所述的方法,其特征在于,所述预设定位方式为是卫星惯性导航系统进行定位。12.根据权利要求1至11任一项所述的方法,其特征在于,所述获取对目标环境拍摄得到的若干组目标图像对,包括:获取对所述目标环境拍摄得到的多个场景图像;将所述多个场景图像进行匹配,得到多个匹配图像对;从所述多个匹配图像对中,选出所述若干组目标图像对。13.根据权利要求12所述的方法,其特征在于,所述从所述多个匹配图像对中,选出所述若干组目标图像对,包括:从所述多个匹配图像对中,查找出匹配特征点对数量满足预设要求的预设数量组目标图像对;将包含同一所述场景图像的两组目标图像对组成关联图像组,其中,所述关联图像组包括第三场景图像、第四场景图像和第五场景图像,所述第三场景图像为所述两组目标图像对均包含的场景图像,所述第四场景图像和所述第五场景图像分别是所述两组目标图像对各自包含的场景图像;对于各所述关联图像组,响应于所述关联图像组的两两图像对之间的第二旋转变化满足可信条件,将所述关联图像组中的所述第四场景图像和所述第五场景图像组成新的所述目标图像对。14.根据权利要求13所述的方法,其特征在于,所述可信条件为:所述关联图像组的两两图像对之间的第二旋转变化满足旋转回环约束;和/或,从所述多个匹配图像对中,查找出匹配特征点对数量满足预设要求的预设数量组目标图像对,包括:利用所述多个匹配图像对,基于匹配特征点对数量构建最小生成树,其中,所述最小生成树中的每个节点为一所述场景图像,所述最小生成树中相连的两个节点组成一组所述目标图像对。15.一种位姿确定方法,其特征在于,包括:获取对目标环境拍摄得到的若干组目标图像对,其中,每组所述目标图像对包含两张场景图像;基于所述若干组目标图像对,确定各所述目标图像对的位姿变化;利用所述位姿变化以及所述场景图像的参考定位信息,确定各所述场景图像的目标位姿,其中,所述参考定位信息是利用预设定位方式对所述场景图像定位得到的,所述目标位姿包括目标旋转和目标平移,所述目标旋转和目标平移中的至少一者是利用所述参考定位信息确定的。16.根据权利要求15所述的方法,其特征在于,所述位姿变化包括第一旋转变化和平移变化,所述利用所述位姿变化以及所述场景图像的参考定位信息,确定各所述场景图像的目标位姿,包括:初始化所述若干组目标图像对中的所述场景图像的候选旋转,并利用第一优化因子对所述候选旋转进行优化,得到各所述场景图像经优化的候选旋转;将所述场景图像经优化的候选旋转作为所述场景图像的目标旋转,或者迭代执行所述利用第一优化因子对所述候
选旋转进行优化,得到各所述场景图像经优化的候选旋转的步骤,在满足预设迭代条件后,将所述场景图像当前经优化的候选旋转作为所述场景图像的目标旋转;其中,所述第一优化因子包括所述第一旋转变化,或者包括所述第一旋转变化和所述参考定位信息中所述场景图像的参考旋转;和/或,利用所述平移变化和各所述场景图像的目标旋转,得到各所述场景图像的目标平移;利用第二优化因子,对各所述场景图像的目标平移进行优化,其中,所述第二优化因子包括以下至少一者:各所述目标图像对的相对相机中心的位移方向、各地图点在各所述场景图像中对应的图像点的特征射线方向、所述参考定位信息中各所述场景图像的参考平移,其中,所述地图点是所述目标环境中与所述若干组目标图像对中的图像点对应的空间点;和/或,在所述利用所述位姿变化以及所述场景图像的参考定位信息,确定各所述场景图像的目标位姿之后,所述方法还包括:利用所述目标位姿,得到所述若干地图点的位置信息;利用第三优化因子,对所述目标位姿进行优化,以得到经优化的目标位姿,其中,所述第三优化因子包括以下至少一者:各所述地图点在各所述场景图像中的投影点误差、所述参考定位信息中各所述场景图像的参考旋转、所述参考定位信息中各所述场景图像的参考平移。17.一种地图构建装置,其特征在于,包括:获取模块,用于获取对目标环境拍摄得到的若干组目标图像对,其中,每组所述目标图像对包含两张场景图像;确定模块,用于基于所述若干组目标图像对,确定各所述目标图像对的位姿变化;地图点模块,用于利用所述位姿变化以及所述场景图像的参考定位信息,得到所述目标环境中的若干地图点的位置信息,其中,所述参考定位信息是利用预设定位方式对所述场景图像定位得到的,所述地图点是所述目标环境中与所述若干组目标图像对中的图像点对应的空间点。18.一种位姿确定装置,其特征在于,包括:获取模块,用于获取对目标环境拍摄得到的若干组目标图像对,其中,每组所述目标图像对包含两张场景图像;第一确定模块,用于基于所述若干组目标图像对,确定各所述目标图像对的位姿变化;第二确定模块,用于利用所述位姿变化以及所述场景图像的参考定位信息,确定各所述场景图像的目标位姿,其中,所述参考定位信息是利用预设定位方式对所述场景图像定位得到的,所述目标位姿包括目标旋转和目标平移,所述目标旋转和目标平移中的至少一者是利用所述参考定位信息确定的。19.一种电子设备,其特征在于,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至14任一项所述的地图构建方法或者权利要求15至16任一项所述的位姿确定方法。20.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至14任一项所述的地图构建方法或者权利要求15至16任一项所述的位姿确定方法。
技术总结
本申请公开了一种地图构建方法、位姿确定方法及相关装置、设备,方法包括:获取对目标环境拍摄得到的若干组目标图像对,其中,每组目标图像对包含两张场景图像;基于若干组目标图像对,确定各组目标图像对中两张场景图像之间的位姿变化;利用位姿变化以及场景图像的参考定位信息,得到目标环境中的若干地图点的位置信息,其中,参考定位信息是利用预设定位方式对场景图像定位得到的,地图点是目标环境中与若干组目标图像对中的图像点对应的空间点。上述方案,能够提高地图点的位置精度。能够提高地图点的位置精度。能够提高地图点的位置精度。
技术研发人员:孙瀚 周立阳 姜翰青
受保护的技术使用者:浙江商汤科技开发有限公司
技术研发日:2022.02.09
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。