一种基于dem在山区无道路条件下多目标点的路径规划方法
技术领域
1.本发明涉及运动控制领域,具体是一种基于dem(数字高程模型)在山区无道路条件下多目标点的路径规划方法。
背景技术:
2.山区战场环境复杂、作战人员高度集中,伤员大量发生、伤情伤类复杂、医疗救治难度大,第一时间高效、准确的医疗救治对于挽救伤员宝贵的生命、降低部队伤残率和阵亡率,保证部队战斗意志持续高涨,具有重要意义。
3.因此在对战场伤员的抢救预案中,进行科学管理,按照应急流程调配与人员分工进行紧急救护,组织安排抢救伤员,除了急救人员具备熟练的护理技术,熟练掌握抢救技术操作之外,医疗人员和车辆迅速到达伤员位置也是应急预案的关键环节。
4.对于战场应急搜救特别是徒步搜救工作,如何找到最短路径在救援任务中起到非常重要的指导意义。
5.最短搜索路径是从出发点到终点的最佳路径,实际应用中最为常用的最短路径算法如dijkstra算法,其核心思想从起点开始搜索所有路径节点的最短路径,直到找到终点。然而,该算法在数据量比较大的情况下运算效率偏低。
6.路径规划方法在城市应急救援领域研究比较多,针对多点救援规划,采用遗传算法与线性规划法相结合,运用现有矢量图中多个线段的组合,从具体的线路和节点找出最佳的一条路线。基于栅格数据,也有对应的算法可以寻找目标点之间最佳路径,如arcgis、supermap也有对应的算法集成。
7.然而,传统路径规划应用的场景是在城市道路较为完整的条件下进行的,对于没有道路网的高海拔山区,救援人员可达性极差,传统的基于矢量路网的最短路径规划方法缺乏必要的数据基础,无法满足在无道路条件下的实施。虽然基于栅格数据,arcgis costconnectivity工具包可以计算不同点之间的连通性;但是,无法计算起始点到多个目标点的综合最短路径,不能解决从起始点到多个目标点的救援问题。
技术实现要素:
8.针对上述问题,本发明提出了一种基于dem在山区无道路条件下多目标点的路径规划方法,解决了复杂地形无道路条件下,战场环境应急救援的指挥调度问题。
9.所述的基于dem在山区无道路条件下多目标点的路径规划方法,具体步骤如下:
10.步骤一、从地理空间数据云中选取dem数据,计算生成坡度栅格数据;
11.步骤二、对生成的坡度栅格数据进行重采样,得到成本栅格数据。
12.步骤三、在用户端将起始点和若干救援点合并,作为连通性分析的参数输入。
13.合并后,有唯一id号字段记录起始点和终止点。
14.步骤四、利用输入参数和成本栅格数据,计算起始点和救援点的连通性,得到数据之间的连通路径和成本距离,组成各合并点之间的连通网络拓扑图。
15.连通网络拓扑图为二维表格,包括每一条记录为一个边,每条边的两个节点region1和region2,以及边的权重pathcost;
16.其中节点region1和region2分别是起始点和救援点的唯一id号字段。
17.步骤五、参照连通网络拓扑图,利用tsp问题解决算法,生成从起始点到多个救援点之间最短路径;并展示给用户。
18.本发明的优点在于:
19.本发明一种基于dem在山区无道路条件下多目标点的路径规划方法,解决了山区无道路条件下,从一个点到多个目标点的路径规划,并工程化实现。
附图说明
20.图1为本发明一种基于dem在山区无道路条件下多目标点的路径规划方法原理图;
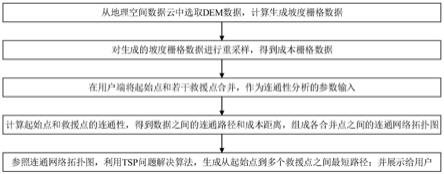
21.图2为本发明一种基于dem在山区无道路条件下多目标点的路径规划方法流程图;
22.图3为本发明成本栅格示例图;
23.图4为本发明形成的多目标应急救援相邻连通网络拓扑图;
24.图5为本发明对多目标应急救援的最佳路径规划结果图。
具体实施方式
25.下面结合实施例和附图对本发明做进一步详细说明。
26.本发明一种基于dem在山区无道路条件下多目标点的路径规划方法,如图1所示,首先,从全球范围内公开的标准数据库中选择aster gdem 30m的dem数据,生成坡度数据,再通过重采样,得到成本栅格;然后,通过用户端输入起始点和若干救援点合并得到合并点;通过连通性计算将合并点和成本栅格组成连通网络拓扑图;最后经tsp计算,输出最佳路径规划结果。
27.如图2所示,具体步骤如下:
28.步骤一、从地理空间数据云中选取dem数据,计算生成坡度数据;
29.dem数据来源于地理空间数据云(http://www.gscloud.cn/)提供的aster gdem 30m分辨率。
30.步骤二、对生成的坡度数据进行重采样,重采样映射表如表1所示,得到成本栅格数据。
31.使用坡度数据作为成本栅格的原因是考虑到,救援力量在通过路径的时候,最大的阻抗来源于坡度。在实际操作过程中,如果可以预判起始点和多个救援点范围,那么可以计算这个范围内的成本栅格。
32.表1
33.34.成本栅格示例图如图3所示,颜色越深,成本越低,颜色越高,成本越低成本栅格是一种栅格数据,用于计算空间距离的空间阻抗权重。可以由不同的方法生成,本方法主要采用坡度数据,同理,也可以将其他数据例如:土地利用类型等作为数据源,通过一定的权重比叠加生成新的成本栅格。
35.步骤三、在用户端输入起始点和若干救援点并合并,作为连通性分析的参数输入。
36.合并后,有唯一id号字段记录起始点和终止点。
37.步骤四、利用输入参数和成本栅格数据,计算起始点和救援点的连通性,得到合并点数据之间的连通路径和成本距离,组成各合并点之间的连通网络拓扑图。
38.使用商业软件的分析方法(arcgis costconnectivity)计算连通性;
39.连通网络拓扑图为二维表格,属性表如表1所示;包括每一条记录为一个边,每条边的两个节点region1和region2,以及边的权重pathcost;
40.其中节点region1和region2分别是起始点和救援点的唯一id号字段。
41.表1
[0042][0043]
该表格对应的地图展示如图4所示。
[0044]
步骤五、参照连通网络拓扑图,利用tsp(traveling salesman problem)问题解决算法,生成从起始点到多个救援点之间最短路径;并展示给用户。
[0045]
如图5所示,即为起始点到救援点之间最终生成的最短路径。
技术特征:
1.一种基于dem在山区无道路条件下多目标点的路径规划方法,其特征在于,具体步骤如下:首先、从地理空间数据云中选取dem数据,计算生成坡度栅格数据;并对生成的坡度栅格数据进行重采样,得到成本栅格数据;然后、在用户端将起始点和若干救援点合并,将起始点和终止点分别用唯一id号字段记录,作为连通性分析的参数输入;接着,利用输入参数和成本栅格数据,计算起始点和救援点的连通性,得到数据之间的连通路径和成本距离,组成各合并点之间的连通网络拓扑图;最后、参照连通网络拓扑图,利用tsp问题解决算法,生成从起始点到多个救援点之间最短路径;并展示给用户。2.如权利要求1所述的一种基于dem在山区无道路条件下多目标点的路径规划方法,其特征在于,所述的连通网络拓扑图为二维表格,包括每一条记录为一个边,每条边的两个节点region1和region2,以及边的权重pathcost;其中节点region1和region2分别是起始点和救援点的唯一id号字段。
技术总结
本发明提出一种基于DEM在山区无道路条件下多目标点的路径规划方法,属于运动控制领域;具体为:首先,从地理空间数据云中选取DEM数据,计算生成坡度栅格数据;并对坡度栅格数据进行重采样,得到成本栅格数据。然后,在用户端将起始点和若干救援点合并,作为连通性分析的参数输入。接着、利用输入参数和成本栅格数据,计算起始点和救援点的连通性,得到数据之间的连通路径和成本距离,组成各合并点之间的连通网络拓扑图。最后、参照连通网络拓扑图,利用TSP问题解决算法,生成从起始点到多个救援点之间最短路径;并展示给用户。本发明解决了山区无道路条件下,从一个点到多个目标点的路径规划,并工程化实现。并工程化实现。并工程化实现。
技术研发人员:戴龙 卢欲鸿 孙帅旗 郁文赫 陈淑迎 杨阳 姚勇航
受保护的技术使用者:北京四象爱数科技有限公司
技术研发日:2022.01.27
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。