1.本发明涉及识别和控制领域,尤其涉及一种球门瞄准装置的控制方法及系统。
背景技术:
2.对目标物的识别、瞄准并对底盘角度的调整是实现机器人底盘的定位导航的关键,并且由于目标物的种类、体积、形状不同,对目标物的识别、瞄准程序往往需要有针对性地定制设计。目前的h型球门瞄准方案大多注重于识别横杆,且识别算法主要集中于简单的rgb滤波与轮廓提取,主要存在以下问题:识别对象单一,导致识别率低;难以确定横杆两端点的确切位置,对球门中心的定位效果不佳;现场灯光环境多变,单一参数在不同光照环境下对球门的识别率差别极大;现场背景环境复杂,容易出现与横杆有类似特征的物体的干扰;球门中点与图像中心的像素差值并不能代表底盘与球门中心的偏差角度。
技术实现要素:
3.为了解决上述技术问题,本发明的目的是提供一种球门瞄准装置的控制方法及系统,能够将对球门瞄准的过程自动化并提高球门瞄准的准确度、识别率、鲁棒性。
4.本发明所采用的第一技术方案是:一种球门瞄准装置的控制方法,包括以下步骤:
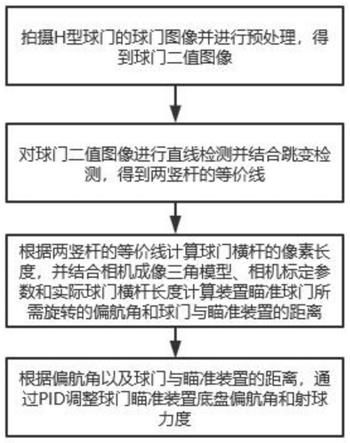
5.拍摄h型球门的球门图像并进行预处理,得到球门二值图像;
6.对球门二值图像进行直线检测并结合跳变检测,得到两竖杆的等价线;
7.根据两竖杆的等价线计算球门横杆的像素长度,并结合相机成像三角模型、相机标定参数和实际球门横杆长度计算装置瞄准球门所需旋转的偏航角和球门与瞄准装置的距离;
8.根据偏航角以及球门与瞄准装置的距离,通过pid调整球门瞄准装置底盘偏航角和射球力度。
9.进一步,所述拍摄h型球门的球门图像并进行预处理,得到球门二值图像这一步骤,其具体包括:
10.基于相机拍摄h型球门的球门bgr图像并进行颜色空间转换,得到hsv图像;
11.将hsv图像进行阈值化处理,得到仅包括球门及少数干扰项的二值化图像;
12.基于长方形且高远大于宽的kernel对二值化图像进行形态学处理,滤除干扰,得到球门二值图像。
13.进一步,所述对球门二值图像进行直线检测并结合跳变检测,得到两竖杆的等价线这一步骤,其具体包括:
14.基于霍夫直线检测方法对球门二值图像进行直线检测,得到直线段;
15.计算每根直线段的中点坐标的横坐标;
16.对所有直线段的中点坐标的横坐标进行遍历,计算相邻线段间中点的横坐标差值;
17.判断到该差值与之前差值超出预设值,认定该差值对应的两条线段分别代表球门
的左竖杆与右竖杆,将这两条直线段分别记为左竖杆等价线和右竖杆等价线。
18.进一步,所述根据两竖杆的等价线计算球门横杆的像素长度,并结合相机成像三角模型、相机标定参数和实际球门横杆长度计算装置瞄准球门所需旋转的偏航角和球门与瞄准装置的距离这一步骤,其具体包括:
19.由相机标定所得到的畸变系数对两竖杆的等价线的端点坐标进行畸变矫正,并将左竖杆等价线和右竖杆等价线的中点连接,得到横杆等价线和球门横杆的像素长度;
20.根据相机焦距、球门横杆的像素长度和实际球门横杆长度,计算得到球门与瞄准装置的距离;
21.将横杆等价线中点的横坐标与相机画面中轴线横坐标的差值记为像素偏航值,通过三角模型计算装置瞄准球门所需旋转的偏航角。
22.进一步,球门与瞄准装置的距离的计算公式如下:
[0023][0024]
上式中,h表示球门与瞄准装置的距离,l1表示实际球门横杆长度,d表示相机焦距,l2表示球门横杆的像素长度。
[0025]
进一步,装置瞄准球门所需旋转的偏航角的计算公式如下:
[0026][0027]
上式中,θ表示装置瞄准球门所需旋转的偏航角,x表示像素偏航值。
[0028]
本发明所采用的第二技术方案是:一种球门瞄准装置的控制系统,包括:
[0029]
拍摄模块,用于拍摄h型球门的球门图像;
[0030]
预处理模块,用于对球门图像进行预处理,得到球门二值图像;
[0031]
检测模块,用于对球门二值图像进行直线检测并结合跳变检测,得到两竖杆的等价线;
[0032]
计算模块,用于根据两竖杆的等价线计算球门横杆的像素长度,并结合相机成像三角模型、相机标定参数和实际球门横杆长度计算装置瞄准球门所需旋转的偏航角和球门与瞄准装置的距离;
[0033]
调整模块,用于根据偏航角以及球门与瞄准装置的距离,将此刻偏航角与前一时间偏航角的差值记为error_angle,将error_angle作为负反馈参数,代入pid系统,基于matlab建模并仿真进而得出较优的pid参数,以此调整装置角度瞄准球门。
[0034]
本发明方法及系统的有益效果是:本发明通过预处理排除环境中的干扰项且在不同光照条件下均有良好的识别率,基于相机标定参数对相机畸变的矫正仅对检测到的直线进行计算而非在预处理时对图像进行全图矫正,既有效减少了检测误差也降低了算力的消耗,最后对角度的解算能够准确地得到球门的中点与底盘的偏差角度而不是偏差像素值,避免了后期主控调节偏航角时因数据尺度不同带来的pid难以调参。
附图说明
[0035]
图1是本发明一种球门瞄准装置的控制方法的步骤流程图;
[0036]
图2是本发明一种球门瞄准装置的控制系统的结构框图。
具体实施方式
[0037]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0038]
如图1所示,本发明提供了一种球门瞄准装置的控制方法,该方法包括以下步骤:
[0039]
s1、拍摄h型球门的球门图像并进行预处理,得到球门二值图像;
[0040]
s1.1、基于相机拍摄h型球门的球门bgr图像并进行颜色空间转换,得到hsv图像;
[0041]
具体地,将rgb格式图片转为hsv再进行阈值化处理,使得在不同亮度条件下程序都有良好的识别率。
[0042]
s1.2、将hsv图像进行阈值化处理,得到仅包括球门及少数干扰项的二值化图像;
[0043]
s1.3、基于长方形且高远大于宽的kernel对二值化图像进行形态学处理,滤除干扰,得到球门二值图像。
[0044]
具体地,使用长方形且高远大于宽的kernel可以滤去绝大部分干扰物,同时可将球门的横杆一并滤去。
[0045]
s2、对球门二值图像进行直线检测并结合跳变检测,得到两竖杆的等价线;
[0046]
s2.1、基于霍夫直线检测方法对球门二值图像进行直线检测,得到直线段;
[0047]
具体地,绝大多数情况下所检测到的线段数量远大于2(球门竖杆数量),故需进行进一步筛选:
[0048]
s2.2、计算每根直线段的中点坐标的横坐标;
[0049]
s2.3、对所有直线段的中点坐标的横坐标进行遍历,计算相邻线段间中点的横坐标差值;
[0050]
s2.4、判断到该差值与之前差值超出预设值,认定该差值对应的两条线段分别代表球门的左竖杆与右竖杆,将这两条直线段分别记为左竖杆等价线和右竖杆等价线。
[0051]
具体地,跳变检测即对检测到的众多线段的中点横坐标进行遍历,计算相邻线段间中点的横坐标差值,当该差值远大于之前的差值时,则认定该差值对应的两条线段分别可代表球门的左竖杆与右竖杆,将这两条线段分别记为左竖杆等价线与右竖杆等价线。
[0052]
s3、根据两竖杆的等价线计算球门横杆的像素长度,并结合相机成像三角模型、相机标定参数和实际球门横杆长度计算装置瞄准球门所需旋转的偏航角和球门与瞄准装置的距离;
[0053]
s3.1、由相机标定所得到的畸变系数对两竖杆的等价线的端点坐标进行畸变矫正,并将左竖杆等价线和右竖杆等价线的中点连接,得到横杆等价线和球门横杆的像素长度;
[0054]
具体地,仅对检测到的直线进行计算而非在预处理时对图像进行全图矫正,既有效减少了检测误差也降低了算力的消耗。
[0055]
s3.2、根据相机焦距、球门横杆的像素长度和实际球门横杆长度,计算得到球门与瞄准装置的距离;
[0056]
具体地,球门与瞄准装置的距离的计算公式如下:
[0057]
[0058]
上式中,h表示球门与瞄准装置的距离,l1表示实际球门横杆长度,d表示相机焦距,l2表示球门横杆的像素长度。
[0059]
s3.3、将横杆等价线中点的横坐标与相机画面中轴线横坐标的差值记为像素偏航值,通过三角模型计算装置瞄准球门所需旋转的偏航角。
[0060]
具体地,装置瞄准球门所需旋转的偏航角的计算公式如下:
[0061][0062]
上式中,θ表示装置瞄准球门所需旋转的偏航角,x表示像素偏航值。
[0063]
s4、根据偏航角以及球门与瞄准装置的距离,通过pid调整球门瞄准装置底盘偏航角和射球力度。
[0064]
如图2所示,一种球门瞄准装置的控制系统,包括:
[0065]
拍摄模块,用于拍摄h型球门的球门图像;
[0066]
预处理模块,用于对球门图像进行预处理,得到球门二值图像;
[0067]
检测模块,用于对球门二值图像进行直线检测并结合跳变检测,得到两竖杆的等价线;
[0068]
计算模块,用于根据两竖杆的等价线计算球门横杆的像素长度,并结合相机成像三角模型、相机标定参数和实际球门横杆长度计算装置瞄准球门所需旋转的偏航角和球门与瞄准装置的距离;
[0069]
调整模块,用于根据偏航角以及球门与瞄准装置的距离,将此刻偏航角与前一时间偏航角的差值记为error_angle,将error_angle作为负反馈参数,代入pid系统,基于matlab建模并仿真进而得出较优的pid参数,以此调整装置角度瞄准球门。
[0070]
具体地,还包括:
[0071]
标定模块,用于获取相机的标定参数。
[0072]
上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0073]
一种球门瞄准装置的控制装置:
[0074]
至少一个处理器;
[0075]
至少一个存储器,用于存储至少一个程序;
[0076]
当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上所述一种球门瞄准装置的控制方法。
[0077]
上述方法实施例中的内容均适用于本装置实施例中,本装置实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0078]
一种存储介质,其中存储有处理器可执行的指令,其特征在于:所述处理器可执行的指令在由处理器执行时用于实现如上所述一种球门瞄准装置的控制方法。
[0079]
上述方法实施例中的内容均适用于本存储介质实施例中,本存储介质实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0080]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。