高层墙壁清洁机器人
【技术领域】
1.本发明涉及清洁装置技术领域,特别是涉及一种高层墙壁清洁机器人。
背景技术:
2.市面上的一些高层的墙壁需要清洁时,一般通过吊机设备将清洁工作人员悬吊在高层墙壁处,通过清洁工作人员进行清洁,通过采用如此方式,存在清洁工作人员掉落的安全隐患。
3.因此,现有技术存在不足,需要改进。
技术实现要素:
4.为克服上述的技术问题,本发明提供了一种高层墙壁清洁机器人。
5.本发明解决技术问题的方案是提供一种高层墙壁清洁机器人,包括主控制箱、左螺旋桨、右螺旋桨、清洁装置及牵引绞车组件,所述牵引绞车组件的底端连接有主控制箱,所述左螺旋桨、右螺旋桨分别连接在主控制箱水平方向的两端,所述清洁装置连接在主控制箱靠近墙壁的一端且与主控制箱电性连接,所述牵引绞车组件、左螺旋桨及右螺旋桨分别与主控制箱电性连接。
6.优选地,所述清洁装置包括清洁滚筒、清洁剂喷水系统及伸缩装置,所述清洁剂喷水系统部分设置在清洁滚筒的上方并与清洁滚筒固定连接,部分固定于主控制箱上,所述伸缩装置一端与主控制箱固定连接,另一端与清洁滚筒固定连接。
7.优选地,所述高层墙壁清洁机器人还包括降落架,所述降落架固定在主控制箱远离牵引绞车组件的一端。
8.优选地,所述牵引绞车组件包括主绞轮组及支撑板,主绞轮组固定设置在支撑板的一面上,主绞轮组外侧设置有吊索压轮组,吊索压轮组由多个小吊轮组成。
9.优选地,所述小吊轮设置为8个。
10.优选地,在所述吊索压轮组与主绞轮组之间的主绞轮组上设置有v型沟槽,所述吊索压轮组外设置有松紧弹簧,所述松紧弹簧一端连接在支撑板上,另一端与吊索压轮组连接。
11.优选地,所述主绞轮组设置有两个,每一所述主绞轮组的直径为110mm。
12.优选地,在所述支撑板顶端设置有顶部导向小滑轮,所述顶部导向小滑轮由多个小型滑轮组成。
13.优选地,在所述松紧弹簧一端设置有调节螺母,所述调节螺母设置在松紧弹簧与吊索压轮组之间。
14.优选地,在所述主绞轮组两侧均设置有出线槽轨道。
15.优选地,所述吊索压轮组环绕设置在主绞轮组外。
16.相对于现有技术,本发明的高层墙壁清洁机器人具有如下优点:
17.通过该产品吊设在高层外墙处,由位于远离楼层的工作人员遥控,对墙壁进行清
洁,具有较高的自动化程度,同时无需清洁工作人员在高层墙壁的外侧,不存在清洁工作人员在进行清洁工作时掉落的可能性,具有较佳的安全系数,有利于降低企业的损失及清洁作业的便利性及安全性。
【附图说明】
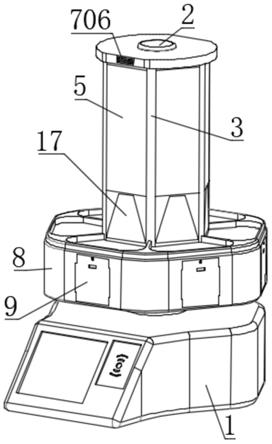
18.图1是本发明高层墙壁清洁机器人的立体结构示意图。
19.图2是本发明高层墙壁清洁机器人的立体结构示意图。
20.图3是本发明主绞轮组的立体结构示意图。
21.图4是图2中a处的放大图。
22.附图标记说明:
23.1、高层墙壁清洁机器人;2、牵引绞车组件;3、主绞轮组;4、支撑板;5、吊索压轮组;6、v型沟槽;7、松紧弹簧;8、分线器;9、顶部导向小滑轮;10、调节螺母;11、主控制箱;13、出线槽轨道;14、降落架;15、左螺旋桨;16、右螺旋桨;17、清洁装置;18、清洁滚筒;19、清洁剂喷水系统;20、伸缩装置。
【具体实施方式】
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
25.请参阅图1-4,本发明提供一种高层墙壁清洁机器人1,其具有自动侦查及避开墙面障碍物的功能,包括牵引绞车组件2,其中牵引绞车组件2包括主绞轮组3及支撑板4,主绞轮组3固定设置在支撑板4的一面上,主绞轮组3外侧设置有吊索压轮组5,吊索压轮组5由多个小吊轮组成,在本发明中为八个,其也可以设置为9-12个,具体可根据实际进行设置,吊索压轮组5与主绞轮组3之间的主绞轮组3上设置有v型沟槽6,吊索压轮组5外设置有松紧弹簧7,松紧弹簧7一端连接在支撑板4上,另一端与吊索压轮组5连接。
26.本发明,优选的,主绞轮组3设置有两个,每一主绞轮组3的直径为110mm,能够平衡吊索的弯曲疲劳和旋转速率,吊索压轮组5环绕设置在主绞轮组3外,能够调节压力的松紧;主绞轮组3之间设置有分线器8,能够平衡吊索的弯曲疲劳和旋转速率。
27.本发明,优选的,在支撑板4顶端设置有顶部导向小滑轮9,顶部导向小滑轮9由多个小型滑轮组成,用以增加吊索的转动便利性及降低引线被割伤的概率。
28.本发明,在松紧弹簧7一端设置有调节螺母10,调节螺母10设置在松紧弹簧7与吊索压轮组5之间,用以调节松紧弹簧7与主绞轮组3之间的压吊索间距,当松紧弹簧7收紧时整圈吊索压轮组5向主绞轮组3的v型沟槽6内收紧。
29.本发明,优选的,支撑板4的底端连接有与外界电性连接的主控制箱11,主绞轮组3与主控制箱11电性连接,高层墙壁清洁机器人1还包括左螺旋桨15、右螺旋桨16,左螺旋桨15、右螺旋桨16分别连接在主控制箱11水平方向的两端,左螺旋桨15、右螺旋桨16与主控制箱11电性连接,左螺旋桨15、右螺旋桨16用于通过产生风吹抵墙壁提供一定的压力以维持高层墙壁清洁机器人1相对稳定及提升清洁能力,利于清洁工作的顺利进行,也用于在该产品在遇到障碍物时通过吹更强劲的风以增加与墙壁之间的距离以便于顺利通过。
30.其中,在主绞轮组3一侧设置有出线槽轨道13,便于对吊索的运动路径进行约束,避免吊索随意移动而导致打结情形的产生,分线器8通过钣金片状焊接的方式固定在支撑板4一侧。
31.优选地,本发明的高层墙壁清洁机器人1还包括清洁装置17,清洁装置17用于通过在墙壁上滑动以对墙壁进行擦拭清洁,清洁装置17连接在主控制箱11靠近墙壁的一端且与主控制箱11电性连接。
32.进一步地,清洁装置17包括清洁滚筒18、清洁剂喷水系统19及伸缩装置20,清洁剂喷水系统19部分设置在清洁滚筒18的上方并与清洁滚筒18固定连接,部分固定于主控制箱11上,伸缩装置20一端与主控制箱11固定连接,另一端与清洁滚筒18固定连接。清洁滚筒18用于对墙壁进行擦拭,并可在伸缩装置20的带动下增减擦拭力度、调节擦拭距离;清洁剂喷水洗头工19用于进行喷清洁剂至墙壁以便于提升擦拭的干净程度;伸缩装置20用于调节清洁滚筒18、清洁剂喷水系统19与墙壁之间的距离以便于进行更好地擦拭,也使清洁滚筒18可以适应凹凸不平的墙面及始终与墙面贴合。
33.具体地,主控制箱11可通过改变右螺旋桨16、左螺旋桨15的速度差调节高层墙壁清洁机器人1的水平姿态以使清洁滚轮18始终平行于墙壁,利于提升清洁效果。
34.进一步地,在主控制箱11远离牵引绞车组件2的一端上设置有降落架14,便于着地时代替主控制箱11与地面接触,降低了主控制箱11因直接与地面接触而导致刮损、撞坏的可能性。
35.使用时,通过设置的主绞轮组3,结合了现有两种大型吊船牵引绞车的主要优点,然后尽量缩小整体设计,减低整体重量,同时利用多个吊索压轮组5和v型沟槽6主轮保证了主绞轮组3和吊索有足够的摩擦力,从而使得程式控制的主绞轮组3的准确转动行程,不会出现滑步错误,同时通过设置的松紧弹簧7,能够调节多个吊索压轮组5的松紧程度,从而调节入吊索的畅顺度,具体为当松紧弹簧7向远离吊索压轮组5的方向收紧时,整圈压线导论沿弧线方向收紧。通过设置的分线器8,利用分线器8在生产时的特性,由于分线器8制作方法采用不锈钢,用钣金片状焊接的方法结合一根不锈钢圆管,将原来需要七个零件完成的功能,用一个的多功能的件,就做到分线、导线、出线的三个功能,价格还比原来的分线装置便宜,同时还能保证生产时间短,从而保证能够在现场进行快速的安装。
36.具体地,高层墙壁清洁机器人1为通过工作人员操控遥控装置对主控制箱11的控制实现对右螺旋桨16、左螺旋桨15、清洁装置17及牵引绞车组件2的控制。
37.相对于现有技术,本发明的高层墙壁清洁机器人具有如下优点:
38.通过该产品吊设在高层外墙处,由位于远离楼层的工作人员遥控,对墙壁进行清洁,具有较高的自动化程度,同时无需清洁工作人员在高层墙壁的外侧,不存在清洁工作人员在进行清洁工作时掉落的可能性,具有较佳的安全系数,有利于降低企业的损失及清洁作业的便利性及安全性。
39.以上所述仅为本发明的较佳实施例,并非因此限制本发明的专利范围,凡是在本发明的构思之内所作的任何修改,等同替换和改进等均应包含在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。