技术特征:
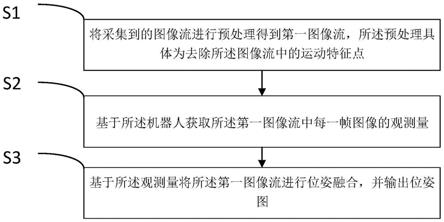
1.一种动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述方法包括以下步骤:s1、将采集到的图像流进行预处理得到第一图像流,所述预处理具体为去除所述图像流中的运动特征点;s2、基于所述机器人获取所述第一图像流中每一帧图像的观测量;s3、基于所述观测量将所述第一图像流进行位姿融合,并输出位姿图。2.如权利要求1所述的动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述步骤s1具体包括以下分步骤:s11、提取出所述图像流中每一帧图像的特征点,同时还基于先验动态物体确定出所述图像流中先验特征点;s12、将所述图像流中每一帧图像的特征点中对应的先验特征点删除。3.如权利要求2所述的动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述步骤s11中的提取出所述图像流中每一帧图像的特征点具体包括以下分步骤:s111、确定出所述图像流中每一帧图像的采样尺度金字塔;s112、通过多个流操作队列确定出所述采样尺度金字塔中每一层图像中的所有fast角点;s113、确定出每一个fast角点的描述子;s114、将每一个fast角点和对应的描述子进行组合并作为所述特征点。4.如权利要求1所述的动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述观测量具体为所述动态机器人的角速度、角度、所述机器人的左轮速度、所述机器人的右轮速度、所述动态机器人在其所在平面上的横轴上的平移值和所述动态机器人在其所在平面上的纵轴上的平移值。5.如权利要求4所述的动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述步骤s3具体包括以下分步骤:s31、将每一帧图像的观测量输入到预设滤波器中;s32、基于所述预设滤波器和所述观测量确定出每一帧图像对应的位姿图,并将所述位姿图进行输出。6.如权利要求5所述的动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述步骤s32还包括检测当前位姿图是否有回环边,若是,则根据所述回环边对上一帧图像对应的位姿图进行回环纠正,若否,则继续确定下一帧图像对应的位姿图。7.如权利要求5所述的动态机器人在动态场景中的定位和地图构建方法,其特征在于,所述步骤s32中基于所述预设滤波器和所述观测量确定出每一帧图像对应的位姿图还包括通过所述预设滤波器为所述观测量分配权重。
技术总结
本发明公开了一种动态机器人在动态场景中的定位和地图构建方法,包括:先将采集到的图像流进行预处理得到第一图像流,所述预处理具体为去除所述图像流中的运动特征点;然后基于所述机器人获取所述第一图像流中每一帧图像的观测量;最后基于所述观测量将所述第一图像流进行位姿融合,并输出位姿图,其中预处理具体为,先提取出所述图像流中每一帧图像的特征点,同时还基于先验动态物体确定出所述图像流中先验特征点;然后将所述图像流中每一帧图像的特征点中对应的先验特征点删除,提高动态机器人在动态场景中的定位和地图构建的准确性,同时减少其计算量,提高其处理速度。提高其处理速度。提高其处理速度。
技术研发人员:谢佩君 张子健 陈星翰 候岚岚 羊铭
受保护的技术使用者:上海谦尊升网络科技有限公司
技术研发日:2022.03.02
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。