1.本发明涉及过滤呼吸面罩技术领域,具体是一种头戴便携式电动空气净化呼吸机和控制方法。
背景技术:
2.在现代化的进程中,人类对于能源的需求在不断增加,对于相关能源的开采作业,不可避免地,需要工人暴露在恶劣的工地环境之下。国内现有呼吸机有调节不及时、呼吸体验不通畅、噪音大、价格昂贵、携带不便,适用场合具有局限性等问题。
技术实现要素:
3.本发明要解决的技术问题是提供一种头戴便携式电动空气净化呼吸机和控制方法,用以根据呼吸机的面罩内的压力值来自动控制涡轮风机的转速,持续、高效地向面罩内提供干净、压力合适的呼吸环境。
4.为了解决上述技术问题,本发明提供一种头戴便携式电动空气净化呼吸机,包括主机,右空气通道、面罩、左空气通道依次密封连接为一个圆环形的空气流道;
5.所述主机的内腔中设有涡轮风机、控制器和电池,涡轮风机的出风口正对右空气通道的尾端入口;
6.所述控制器包括微差压传感器、逆变器和微控制器,所述左空气导管内设有感应导管,感应导管头端伸入面罩内,感应导管的尾端与微差压传感器上的一个压力输入端相连接;微差压传感器的另一个压力输入端位于主机的内腔中;
7.所述微差压传感器和微控制器信号相连接,微控制器通过逆变器与涡轮风机信号相连接,充电电池和涡轮风机分别与控制器相连接;
8.所述微控制器包括微差压闭环系统控制单元。
9.作为本发明的一种头戴便携式电动空气净化呼吸机的改进:
10.所述主机的壳体包括上壳体和下壳体,上壳体和下壳体相互为可拆卸连接且上下叠加为主机的壳体;上壳体和下壳体的左右两端和外侧均设有开口,上壳体和下壳体左右两端的开口上下围合成主机壳体的循环出风口和循环进风口,右空气通道的尾端与循环进风口为可拆卸连接,左空气导管的尾端与循环出风口为可拆卸连接,右空气通道和左空气导管的前端分别与面罩的左右两侧固定连接;
11.所述上壳体和下壳体的外侧开口上下围合成主机壳体的外侧开口,在主机壳体的外侧开口处设有后盖和过滤装置。
12.作为本发明的一种头戴便携式电动空气净化呼吸机的进一步改进:
13.所述过滤装置包括过滤支架,过滤支架位于后盖的内侧;
14.所述主机壳体的左右两边分别设有转轴和锁扣,后盖和过滤支架的一侧均与转轴转动连接,后盖的另一侧与主机的外壳通过锁扣相连接;后盖和过滤支架的四周均设有密封材料。
15.作为本发明的一种头戴便携式电动空气净化呼吸机的进一步改进:
16.所述后盖上设有空气入口,在所述过滤支架上设有过滤片,过滤片正对空气入口,过滤片与过滤支架为可拆卸连接。
17.作为本发明的一种头戴便携式电动空气净化呼吸机的进一步改进:
18.所述右空气导管和左空气导管均为波纹管,所述右空气导管、左空气导管和面罩均采用了无毒无害的弹性材料;
19.所述面罩为覆盖口鼻部位的半封闭面罩,在面罩上设有由内向外单向通道的单向阀门膜。
20.本发明还同时提供一种头戴便携式电动空气净化呼吸机的控制方法,具体过程如下:
21.s1、涡轮风机通电运行,外界空气经过滤片后成为干净空气进入主机的内腔,在涡轮风机的作用下通过右空气导管持续输送进入面罩内;微差压传感器实时监测面罩内的面罩气压p2和主机内的外界气压p1并转换为压差信号e(t)传输给微控制器的微差压闭环系统控制单元;
22.s2、吸气过程:
23.吸气时,面罩气压p2逐渐减小,微控制器通过微差压闭环系统控制单元输出脉冲宽度调制pwm信号经过逆变器后修正涡轮风机的转速平滑上升,干净空气加速进入面罩内,右空气导管和面罩内的面罩气压p2逐渐增大;
24.然后,微差压传感器产生的压差信号e(t)逐渐缩小,微控制器通过微差压闭环系统控制单元输出的脉冲宽度调制pwm信号经过逆变器后修正涡轮风机的转速小幅度回落,直至压差信号e(t)=0,涡轮风机匀速转动;
25.s3、呼气过程:
26.呼气时面罩气压p2逐渐变大,呼出的气体通过单向阀门膜排出至外界;
27.微控制器通过微差压闭环系统控制单元输出脉冲宽度调制pwm信号经过逆变器后修正涡轮风机的转速快速下降到低速状态,面罩气压p2迅速回落,直至压差信号e(t)=0,涡轮风机匀速转动。
28.作为本发明的一种头戴便携式电动空气净化呼吸机的控制方法的改进:
29.所述微差压闭环系统控制单元包括依次连接的pi控制器、气压与速度关系标定单元和无传感器速度控制系统,具体实现过程为:
30.1)、所述外界气压p1和面罩气压p2输入微差压传感器后转换成压差信号e(t)并传送给pi控制器:
31.e(t)=p1-p2(1)
32.2)、压差信号e(t)经过pi控制器按公式(2)计算输出期望气压p(t)并传输给气压与速度关系标定单元:
[0033][0034]
其中,kp、ki分别为比例系数、积分系数。
[0035]
3)、气压与速度关系标定单元按公式(3)计算输出风机输出的期望速度w
ref
并传输给无传感器速度控制系统:
[0036]wref
=-7.786p(t)2 1868p(t) 3100(3)
[0037]
4)、微控制器根据期望速度w
ref
的变化来改变脉冲宽度调制pwm信号的占空比,然后脉冲宽度调制pwm信号通过逆变器修正所述涡轮风机的转速。
[0038]
本发明的有益效果主要体现在:
[0039]
1、本发明的涡轮风机开启运行时,将空气从空气入口吸入,然后送至呼吸机的面罩内,以保证呼吸面罩内有一个略高于大气压的正压;
[0040]
2、当使用者吸气时,本发明的微差压闭环系统控制单元控制涡轮风机加速,输出的气流流量增加,从而使呼吸面罩内压力增加,气体自然进入肺内,且面罩内的压力保持在正常正压力水平;当使用者呼气时,涡轮风机减速,减小输出的气流流量,使面罩内压力降低,仍使面罩与涡轮风机之间的气流通道内压力保持在正常正压力水平;从而使得使用者可以自由、轻松地呼吸;
[0041]
3、本发明的左空气导管、右空气导管和面罩均采用了硅树脂、聚碳酸酯等无毒无害弹性材料,半封闭、口鼻环绕型的设计,可以最大程度的适合各种脸型,贴合使用者的面部;
[0042]
4、本发明的主机的壳体由可拆卸的上壳体和下壳体构成,主机的壳体和左空气导管、右空气导管均为可拆卸连接,从而适应不同脸型和头围大小的使用者。
附图说明
[0043]
下面结合附图对本发明的具体实施方式作进一步详细说明。
[0044]
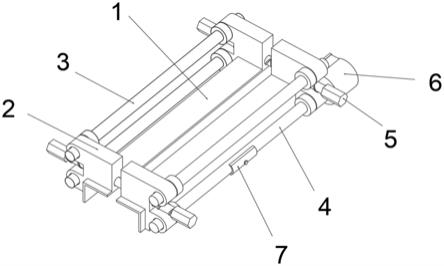
图1为本发明的一种头戴便携式电动空气净化呼吸机的外观结构示意图;
[0045]
图2为本发明一种头戴便携式电动空气净化呼吸机的内部器件的示意图;
[0046]
图3为图1中面罩的结构示意图;
[0047]
图4为微差压闭环系统控制单元实现的流程示意图;
[0048]
图5为输出压力与风机转速对应关系曲线的示意图。
具体实施方式
[0049]
下面结合具体实施例对本发明进行进一步描述,但本发明的保护范围并不仅限于此:
[0050]
实施例1、一种头戴便携式电动空气净化呼吸机(简称为呼吸机),呼吸机的外形结构以及部件连接的设计符合人体脸部模型形状,整体使用轻质材料,适宜佩戴,如图1-3所示,包括主机1、右空气导管2、面罩3和左空气导管4,使用时面罩3朝前方且与使用者的唇鼻部位紧密贴合,主机1位于头颈后方且与使用者的头部枕骨位置紧密贴合,主机1、右空气通道2、面罩3和左空气通道4依次密封连接成一个圆环形空气流道。下文表述中,圆环形的呼吸机与头部贴合的圆环内圈为内侧,圆环外圈为外侧。
[0051]
主机1为近半圆的弧形腔室,主机1的壳体由上壳体11和下壳体12上下叠加卡紧而成,上壳体11和下壳体12相互为可拆卸连接;上壳体11和下壳体12的左右两端和外侧设有开口,上壳体11和下壳体12左右两端的开口上下围合成主机1壳体上左右两侧的循环出风口101和循环进风口102,上壳体11和下壳体12的外侧开口上下围合成主机1壳体的外侧开口,主机1壳体的外侧开口处设有弧形的后盖8和过滤装置;右空气通道2的尾端与循环进风
口 102为可拆卸的密封连接,左空气导管4的尾端与循环出风口101为可拆卸的密封连接:上壳体11和下壳体12上下叠加卡紧的同时使得右空气通道2的尾端与循环进风口102密封连接,左空气导管4的尾端与循环出风口101密封连接;右空气通道2和左空气导管4的前端分别与面罩3的左右两侧固定连接,从而形成从主机1、右空气导管2、面罩3、左空气导管 4再回到主机1循环的空气流道。
[0052]
右空气导管2和左空气导管4均采用无毒无害弹性材料的波纹管,波纹管具有一定的伸缩性可以达到更好的环绕贴合效果,提高舒适性和散热性,整体轻便易携带。右空气导管2 和左空气导管4的设计长度适用于大多数人,如果对于头围较大使用者,波纹管和面罩3都有充分弹性,可以依靠材质本身的弹性拉伸适合较大的头围;对于头围较小使用者,通过往主机1里多放置波纹管1-3节的齿距,分别调节右空气通道2的尾端与循环出风口101、左空气导管4的尾端与循环进风口102的卡紧位置。因主机1内部两侧空间较为充足,每侧最多可以容纳放入的3节波纹管的齿距。
[0053]
在主机1的壳体上,后盖8的左右两边分别设有转轴21和锁扣22,后盖8的内侧设有过滤装置,过滤装置包括弧形的过滤支架9,后盖8和过滤支架9的一侧均与主机1的外壳通过转轴21转动连接,均可以向外打开;后盖8的另一侧与主机1的外壳通过锁扣22相连接;后盖8和过滤支架9的四周均设有密封材料,例如橡胶圈,从而使得后盖8关闭锁紧锁扣22后,由上壳11、下壳12和后盖8相互围合成一个中空的腔室为主机1的内腔,主机1 的内腔中设有涡轮风机7、控制器6和充电电池10。
[0054]
在后盖8上设有栅格状的空气入口81,在过滤支架9上设有过滤片91,过滤片91正对空气入口81,过滤片91与过滤支架9为可拆卸连接。过滤片分为三层,最内层是卫生纱布或无纺布,能够吸收从面罩3循环回主机1内部的佩戴者口鼻喷出的水蒸气,中间是熔喷布组成的过滤层,是过滤装置的核心组成部分,能够过滤病毒或细菌,有效地阻止病毒或细菌的传播,最外层是聚脂纤维无纺布过滤棉,可防止病毒或细菌经飞沫进行传播,同时阻隔外部灰尘颗粒。在工地或特殊的加工场所,可换为中间层为活性炭过滤棉过滤层的过滤棉,以达到更好的灰尘和有毒颗粒吸附效果,更换时只需将过滤片91从过滤支架9上取下即可。外界空气从空气入口81先经过滤支架9上过滤片91的过滤作用后成为干净的空气进入主机1 的内腔。打开后盖8,可以更换过滤片91以及维护主机1内部腔室中的涡轮风机7、控制器 6和更换充电电池10;
[0055]
在循环进风口102处设有涡轮风机7,涡轮风机7的出风口正对循环进风口102,即正对右空气通道2的尾端入口,用以将主机1内腔中过滤干净的空气通过右空气导管2持续鼓风进入面罩3供使用者吸入肺部;涡轮风机7与控制器6信号相连。
[0056]
面罩3采用了硅树脂、聚碳酸酯等无毒无害弹性材料,半封闭、口鼻环绕型的设计,选用鼻部和口均被覆盖的面罩,可以最大程度的适合各种脸型,贴合使用者的面部。在面罩3 上设有单向阀门膜31,单向阀门膜31面对使用者鼻部和口的区域,单向阀门膜31为由内向外的单向通道,使用者呼气时,面罩3内部压力增加,单向阀门膜31打开,呼出的气体向外界排出,而使用者吸气时,面罩3内部为负压,单向阀门膜31关闭,使得面罩3内的气体只能是由右空气导管2进入的过滤干净的空气。
[0057]
控制器6包括微差压传感器、逆变器和微控制器,微控制器包括为软件模块的微差压闭环系统控制单元,微差压传感器包括二个压力输入端且与微控制器信号连接;左空气
导管4的内部设有感应导管5,感应导管5头端伸入面罩3,感应导管5的尾端与微差压传感器上的一个压力输入端相连接,用以将面罩3内的气压(面罩气压p2)传递给微差压传感器,微差压传感器的另一个压力输入端位于主机1的内部用于检测外界气压p1;当两侧传入的压力不一致时,微差压传感器的测量膜片产生位移,其位移量和压力差成正比,通过振荡和解调环节,转换成与压力成正比的电信号。以使用者一个呼吸过程为例,吸气过程中,面罩3内面罩气压p2逐渐减小,此时需要系统输送空气,微差压传感器将面罩3和主机1内腔中的压力差值转换为压差信号e(t)传输到微控制器,微控制器通过微差压闭环系统控制单元持续修正涡轮风机7的转速并使之平滑上升,然后右空气导管2和面罩3内的面罩气压p2逐渐增大,微差压传感器产生的压差信号e(t)逐渐缩小,直至压差信号e(t)=0,涡轮风机7匀速转动;呼气过程中,面罩3内的面罩气压p2逐渐变大,此时不再需要涡轮风机7输送空气,微差压传感器将压差信号e(t)输到微控制器,微控制器通过微差压闭环系统控制单元修正涡轮风机7的转速快速下降到低速状态,面罩气压p2也迅速回落,呼出的气体通过单向阀门膜31进入外界。利用微差压传感器完成呼吸机内空气循环的智能化调节,优化了呼吸机使用安全性和舒适感,供给使用者源源不断的新鲜的空气,保障使用者能够在不同的环境下都能获得良好的呼吸体验。
[0058]
微控制器为arm控制器,与传统的8位和16位微控制器相比,arm控制器具有内核低功耗、高性能的特性,而且具有强大的esd(electro-staticdischarge,静电阻抗性)和emc(electromagneticcompatibility,电磁兼容性)功能,在消费电子和工业控制等领域正逐步取代8位和16位的微控制器。另外,arm所具有运算速度快、外设功能多的优点,可在不额外增加硬件电路的前提下,即可高效地实现微差压闭环系统控制单元。微控制器通过逆变器与涡轮风机7信号相连,微差压传感器输出的压差信号通过微差压闭环系统后输出期望速度,期望速度使得微控制器通过i/o口输出脉冲宽度调制pwm信号控制涡轮风机7的启停以及运行速度。
[0059]
充电电池10与控制器6相连接,控制器6又与涡轮风机7相连接,用以提供各自工作所需电源。
[0060]
微差压闭环系统控制单元包括依次连接的pi控制器、气压与速度关系标定单元和无传感器速度控制系统,微差压传感器通过微差压闭环系统控制单元与涡轮风机7信号相连。微差压传感器输出的压差信号经过微差压闭环系统控制单元后输出脉冲宽度调制pwm信号,实现控制涡轮风机7转速的目的,过程如图4所示,具体为:
[0061]
1、外界气压p1(主机1内腔中的气压)、面罩气压p2(面罩3内的气压)通过微差压传感器两侧的压力输入端分别进入高、低两压力室,作用在δ元件(即敏感元件)的两侧隔离膜片上,将压力传送到测量膜片两侧;
[0062]
2、微差压传感器内部的测量膜片会因为当两侧压力不一致而产生位移,其位移量和压力差成正比,故两侧电容量就不等,电容之间的充放电产生电流,通过振荡和解调环节,转换成与压力成正比的电流信号;a/d转换器检测到电流信号,转换输出成数字信号也就是压差信号e(t)给pi控制器,通过pi控制器,经过线性组合消除了误差,输出更准确的压差信号e(t)给气压与速度关系标定单元;
[0063]
e(t)=p1-p2(1)
[0064]
3、压差信号e(t)并经过pi控制器按公式(2)计算输出期望气压p(t)并传输给气压
与速度关系标定单元:
[0065][0066]
其中,kp、ki分别为比例系数、积分系数
[0067]
公式(2)为经验公式,通过实验获得:测量不同设定输出压力下所对应的风机转速值,输出压力测验值范围选取为4~18cmh2o(392~1764pa),每个输出压力取值点分别测量3次并取平均值,输出压力与风机转速对应关系曲线如附图5所示,并利用matlab的curvefittingtool进行数据拟合,得到拟合关系式如式2所示。
[0068]
4、气压与速度关系标定单元按公式(3)计算输出风机输出的期望速度w
ref
并传输给无传感器速度控制系统:
[0069]wref
=-7.786p(t)2 1868p(t) 3100(3)
[0070]
5、微控制器根据期望速度w
ref
的变化来改变脉冲宽度调制pwm信号的占空比,然后脉冲宽度调制pwm信号通过逆变器修正所述涡轮风机的转速,实现了气压调节的效果。
[0071]
头戴便携式电动空气净化呼吸机的控制方法具体为:
[0072]
1、涡轮风机7通电运行,外界空气从空气入口81经过滤片91后成为过滤后的干净空气进入主机1的内腔,并在涡轮风机7的作用下持续输送进入面罩3内;微差压传感器实时检测面罩3的面罩气压p2和主机1内腔中的外界气压p1并转换为压差信号e(t)传输到微控制器的微差压闭环系统控制单元;
[0073]
2、吸气过程:
[0074]
面罩3内的面罩气压p2逐渐减小,输入的压差信号e(t)通过微差压闭环系统控制单元输出脉冲宽度调制pwm信号经过逆变器后修正涡轮风机7的转速使之平滑上升,过滤后的干净空气加速进入面罩3内的同时,右空气导管2和面罩3内的面罩气压p2逐渐增大;
[0075]
微差压传感器产生的压差信号e(t)逐渐缩小,微控制器通过微差压闭环系统控制单元输出的脉冲宽度调制pwm信号经过逆变器后修正涡轮风机7的转速并使之小幅度回落,直至压差信号e(t)=0,涡轮风机7匀速转动;
[0076]
3、呼气过程:
[0077]
面罩3内的面罩气压p2逐渐变大,呼出的气体通过单向阀门膜31排出至外界的同时,微控制器通过微差压闭环系统控制单元输出的脉冲宽度调制pwm信号经过逆变器后修正涡轮风机7的转速使之快速下降到低速状态,面罩气压p2迅速回落,直至压差信号e(t)=0,涡轮风机7匀速转动。
[0078]
最后,还需要注意的是,以上列举的仅是本发明的若干个具体实施例。显然,本发明不限于以上实施例,还可以有许多变形。本领域的普通技术人员能从本发明公开的内容直接导出或联想到的所有变形,均应认为是本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。