1.本实用新型属于升降翻转设备领域,尤其涉及电液一体化控制的抱夹升降翻转装置。
背景技术:
2.在非标自动化设备开发过程中,需要用到工件抱紧升降机构,而且在工件上升到一定高度之后还需要对其进行翻转,以便于对其进行加工。
3.虽然现有cn 104591065 a中公开了一种安全可靠的抱桶倾倒装置,但是此装置的抱紧是采用固定箍式的抱紧机构,而且翻转采用手动的齿轮箱结构的翻转,无法适用于工件的自动化加工。
4.在cn 207106975 u中公开了一种纱团复位翻转装置,此装置虽然能够实现夹紧和升降,但是其翻转主要采用的电机驱动的轴向翻转,无法适用于整个工件的水平翻转。而且翻转需要借助另一套翻转动力装置。
技术实现要素:
5.本实用新型的主要目的在于提供电液一体化控制的抱夹升降翻转装置,此装置能够用于工件的夹紧,夹紧之后能够实现其高度的升降调节控制,并在高度达到一定高度之后能够自动的翻转,进而实现其翻转角度的调节;此外,此装置通过自动控制系统能够实现自动控制,适用范围广。
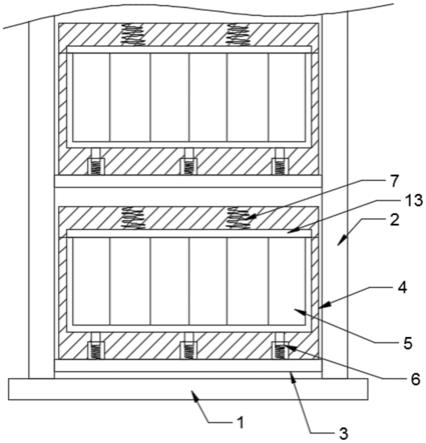
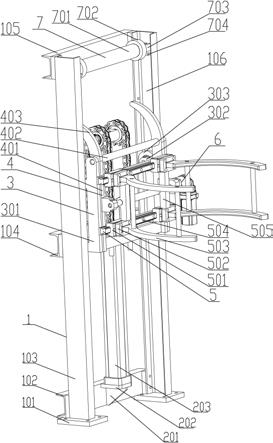
6.为了实现上述的技术特征,本实用新型的目的是这样实现的:电液一体化控制的抱夹升降翻转装置,它包括用于对整个装置进行支撑的机架结构,所述机架结构上通过升降滑动配合有升降滑架结构,所述升降滑架结构与用于驱动其升降的链式升降装置相连;所述升降滑架结构上转动配合有翻转架结构;所述翻转架结构与固定在机架结构顶端的翻转导向机构相配合;所述翻转架结构的外侧壁上安装有用于对工件抱紧的夹臂机构,所述夹臂机构与用于驱动其夹紧的夹紧动力装置相连。
7.所述机架结构包括平行布置的机架立柱,两根机架立柱之间从下至上依次固定有底部横梁、中部横梁和顶部横梁,在机架立柱的底端固定有立柱底板;机架立柱的内侧壁上设置有导向滑槽。
8.所述升降滑架结构包括升降架,所述升降架的两外侧分别通过滚轮支架转动支撑有滚轮,所述滚轮与机架结构的导向滑槽构成滑动配合;所述升降架的背部底端固定有升降架横梁。
9.所述链式升降装置包括液压油缸,所述液压油缸的缸体固定在缸体安装板的顶部,缸体安装板通过加强筋板固定在机架结构的底部横梁的外侧壁上,所述液压油缸的活塞杆顶端固定有顶部支撑座,顶部支撑座的两端固定有轮轴,轮轴上通过轴承转动安装有链轮,链轮与链条啮合传动,链条的一端通过第一拉杆固定在机架结构的中部横梁上,链条的另一端通过第二拉杆固定在升降滑架结构的升降架横梁上。
10.所述翻转架结构包括固定在升降滑架结构的升降架顶部的横杆,所述横杆上转动安装有翻转架,所述翻转架的顶端设置有弧形弯曲端,所述弧形弯曲端与翻转导向机构相配合,并实现整个翻转架绕其横杆翻转转动。
11.所述翻转导向机构包括顶杆,所述顶杆的两端转动安装有导向轮,顶杆的两端通过顶杆连接座固定在支撑座板上,所述支撑座板固定在机架结构的导向滑槽内顶部;所述导向轮与翻转架结构的弧形弯曲端相配合。
12.所述夹臂机构包括平行布置的水平滑轨,水平滑轨固定在翻转架结构的翻转架上;所述水平滑轨上通过滑块对称固定有夹臂底座;夹臂底座上固定有抱臂;位于同一侧的两个夹臂底座之间通过同步梁固定相连。
13.所述夹紧动力装置包括伺服电机,所述伺服电机的输出轴与减速器的输入轴相连,减速器的输出轴与第一丝杆相连,第一丝杆通过中间杆与第二丝杆相连,第一丝杆和第二丝杆的旋向相反,其分别与固定在夹臂机构的两个同步梁内部的螺母座构成丝杆传动;所述第一丝杆、第二丝杆和中间杆的两端支撑在轴承座上,轴承座固定在翻转架结构的翻转架外侧壁上。
14.还包括用于对整个装置进行自动控制的自动控制系统,所述自动控制系统包括控制器,控制器的信号输入端分别连接有压力传感器和倾角传感器;所述压力传感器固定安装在夹臂机构的抱臂内侧壁上,并用于检测抱紧力;所述倾角传感器固定安装在翻转架结构的翻转架外侧壁上,并用于检测翻转架的翻转角度;所述控制器的其中一个信号输出端与电机驱动器相连,电机驱动器与夹紧动力装置的伺服电机相连,并控制伺服电机的转动以控制夹紧力;所述控制器的另一个信号输出端与控制阀相连,控制阀与液压油缸相连,并控制液压油缸的升降以控制翻转架结构的高度和翻转角度。
15.本实用新型有如下有益效果:
16.1、此装置能够用于工件的夹紧,夹紧之后能够实现其高度的升降调节控制,并在高度达到一定高度之后能够自动的翻转,进而实现其翻转角度的调节;此外,此装置通过自动控制系统能够实现自动控制,适用范围广。
17.2、通过上述的机架结构保证了整个结构的强度和稳定性。
18.3、通过上述的升降滑架结构能够实现升降滑动,并用于对翻转架结构进行转动支撑。
19.4、通过上述的链式升降装置能够用于提供升降动力。
20.5、通过上述的翻转架结构能够实现翻转动作,进而带动工件实现翻转。
21.6、通过上述的翻转导向机构能够用于和翻转架结构相配合,进而实现相应的翻转动作。
22.7、通过上述的夹臂机构能够用于工件的抱紧动作。实用过程中通过采用抱臂相互配合将工件抱紧。
23.8、通过上述的夹紧动力装置能够用于提供工件抱紧的动力。
附图说明
24.下面结合附图和实施例对本实用新型作进一步说明。
25.图1是本实用新型第一视角三维图。
26.图2是本实用新型第二视角三维图。
27.图3是本实用新型第三视角三维图。
28.图4是本实用新型第四视角三维图。
29.图5是本实用新型自动控制系统图。
30.图中:机架结构1、链式升降装置2、升降滑架结构3、翻转架结构4、夹臂机构5、夹紧动力装置6、翻转导向机构7、控制器8、压力传感器9、倾角传感器10、电机驱动器11、控制阀12;
31.立柱底板101、底部横梁102、机架立柱103、中部横梁104、顶部横梁105、导向滑槽106;
32.加强筋板201、缸体安装板202、液压油缸203、活塞杆204、顶部支撑座205、链轮206、轮轴207、第一拉杆208、第二拉杆209、链条210;
33.升降架301、滚轮支架302、滚轮303、升降架横梁304;
34.翻转架401、横杆402、弧形弯曲端403;
35.滑块501、夹臂底座502、抱臂503、水平滑轨504、同步梁505;
36.伺服电机601、减速器602、轴承座603、第一丝杆604、中间杆605、第二丝杆606、螺母座607;
37.顶杆701、导向轮702、顶杆连接座703、支撑座板704。
具体实施方式
38.下面结合附图对本实用新型的实施方式做进一步的说明。
39.实施例1:
40.参见图1-5,电液一体化控制的抱夹升降翻转装置,它包括用于对整个装置进行支撑的机架结构1,所述机架结构1上通过升降滑动配合有升降滑架结构3,所述升降滑架结构3与用于驱动其升降的链式升降装置2相连;所述升降滑架结构3上转动配合有翻转架结构4;所述翻转架结构4与固定在机架结构1顶端的翻转导向机构7相配合;所述翻转架结构4的外侧壁上安装有用于对工件抱紧的夹臂机构5,所述夹臂机构5与用于驱动其夹紧的夹紧动力装置6相连。此装置能够用于工件的夹紧,夹紧之后能够实现其高度的升降调节控制,并在高度达到一定高度之后能够自动的翻转,进而实现其翻转角度的调节;此外,此装置通过自动控制系统能够实现自动控制,适用范围广。具体使用过程中,通过链式升降装置2驱动升降滑架结构3实现升降调节,通过翻转架结构4与翻转导向机构7相配合来实现翻转动作,通过夹紧动力装置6能够驱动夹臂机构5实现夹紧动作。
41.进一步的,所述机架结构1包括平行布置的机架立柱103,两根机架立柱103之间从下至上依次固定有底部横梁102、中部横梁104和顶部横梁105,在机架立柱103的底端固定有立柱底板101;机架立柱103的内侧壁上设置有导向滑槽106。通过上述的机架结构1保证了整个结构的强度和稳定性。而且通过采用底部横梁102、中部横梁104和顶部横梁105保证了整个机架结构1的强度。通过导向滑槽106能够实现升降滑架结构3的升降导向。
42.进一步的,所述升降滑架结构3包括升降架301,所述升降架301的两外侧分别通过滚轮支架302转动支撑有滚轮303,所述滚轮303与机架结构1的导向滑槽106构成滑动配合;所述升降架301的背部底端固定有升降架横梁304。通过上述的升降滑架结构3能够实现升
降滑动,并用于对翻转架结构4进行转动支撑。
43.进一步的,所述链式升降装置2包括液压油缸203,所述液压油缸203的缸体固定在缸体安装板202的顶部,缸体安装板202通过加强筋板201固定在机架结构1的底部横梁102的外侧壁上,所述液压油缸203的活塞杆204顶端固定有顶部支撑座205,顶部支撑座205的两端固定有轮轴207,轮轴207上通过轴承转动安装有链轮206,链轮206与链条210啮合传动,链条210的一端通过第一拉杆208固定在机架结构1的中部横梁104上,链条210的另一端通过第二拉杆209固定在升降滑架结构3的升降架横梁304上。通过上述的链式升降装置2能够用于提供升降动力。工作过程中,通过液压油缸203驱动活塞杆204,通过活塞杆204驱动链轮206,通过链轮206驱动链条210,通过链条210带动升降滑架结构3整体沿着机架结构1的导向滑槽106上升。
44.进一步的,所述翻转架结构4包括固定在升降滑架结构3的升降架301顶部的横杆402,所述横杆402上转动安装有翻转架401,所述翻转架401的顶端设置有弧形弯曲端403,所述弧形弯曲端403与翻转导向机构7相配合,并实现整个翻转架401绕其横杆402翻转转动。通过上述的翻转架结构4能够实现翻转动作,进而带动工件实现翻转。
45.进一步的,所述翻转导向机构7包括顶杆701,所述顶杆701的两端转动安装有导向轮702,顶杆701的两端通过顶杆连接座703固定在支撑座板704上,所述支撑座板704固定在机架结构1的导向滑槽106内顶部;所述导向轮702与翻转架结构4的弧形弯曲端403相配合。通过上述的翻转导向机构7能够用于和翻转架结构4相配合,进而实现相应的翻转动作。
46.进一步的,所述夹臂机构5包括平行布置的水平滑轨504,水平滑轨504固定在翻转架结构4的翻转架401上;所述水平滑轨504上通过滑块501对称固定有夹臂底座502;夹臂底座502上固定有抱臂503;位于同一侧的两个夹臂底座502之间通过同步梁505固定相连。通过上述的夹臂机构5能够用于工件的抱紧动作。实用过程中通过采用抱臂503相互配合将工件抱紧。
47.进一步的,所述夹紧动力装置6包括伺服电机601,所述伺服电机601的输出轴与减速器602的输入轴相连,减速器602的输出轴与第一丝杆604相连,第一丝杆604通过中间杆605与第二丝杆606相连,第一丝杆604和第二丝杆606的旋向相反,其分别与固定在夹臂机构5的两个同步梁505内部的螺母座607构成丝杆传动;所述第一丝杆604、第二丝杆606和中间杆605的两端支撑在轴承座603上,轴承座603固定在翻转架结构4的翻转架401外侧壁上。通过上述的夹紧动力装置6能够用于提供工件抱紧的动力。工作过程中,通过伺服电机601驱动减速器602,通过减速器602驱动第一丝杆604和第二丝杆606,并同步带动夹臂机构5的抱臂503相向移动,实现工件的夹持。
48.进一步的,还包括用于对整个装置进行自动控制的自动控制系统,所述自动控制系统包括控制器8,控制器8的信号输入端分别连接有压力传感器9和倾角传感器10;所述压力传感器9固定安装在夹臂机构5的抱臂503内侧壁上,并用于检测抱紧力;所述倾角传感器10固定安装在翻转架结构4的翻转架401外侧壁上,并用于检测翻转架401的翻转角度;所述控制器8的其中一个信号输出端与电机驱动器11相连,电机驱动器11与夹紧动力装置6的伺服电机601相连,并控制伺服电机601的转动以控制夹紧力;所述控制器8的另一个信号输出端与控制阀12相连,控制阀12与液压油缸203相连,并控制液压油缸203的升降以控制翻转架结构4的高度和翻转角度。通过上述的自动控制系统能够实现整个设备的自动控制。而且
采用闭环控制。
49.实施例2:
50.电液一体化控制的抱夹升降翻转装置的控制方法,包括以下步骤:
51.步骤一,启动链式升降装置2,并将升降滑架结构3下移到所需要夹持的工件高度位置;
52.步骤二,启动夹紧动力装置6,通过伺服电机601驱动减速器602,通过减速器602驱动第一丝杆604和第二丝杆606,并同步带动夹臂机构5的抱臂503相向移动,实现工件的夹持;其中,在夹紧过程中,通过压力传感器9检测夹紧力,当夹紧力达到设定值时,压力传感器9将压力信号传递给控制器8,通过控制器8控制电机驱动器11,再由电机驱动器11驱动伺服电机601停止转动;
53.步骤三,待夹臂机构5夹紧工件之后,启动链式升降装置2,通过液压油缸203驱动活塞杆204,通过活塞杆204驱动链轮206,通过链轮206驱动链条210,通过链条210带动升降滑架结构3整体沿着机架结构1的导向滑槽106上升;
54.步骤四,待升降滑架结构3上升到一定高度之后,翻转架结构4的弧形弯曲端403将与翻转导向机构7的导向轮702相接触,继续顶升升降滑架结构3,此时翻转架401将在导向轮702的导向限位下绕着横杆402转动翻转,进而实现工件的翻转;
55.步骤五,在翻转架401转动翻转过程中,通过倾角传感器10检测翻转架401的翻转角度,当其处于翻转到设定角度时,倾角传感器10将倾角信号传递给控制器8,通过控制器8控制控制阀12,通过控制阀12控制液压油缸203的供油,进而控制液压油缸203继续顶升,达到控制翻转角度的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。