1.本发明总体涉及真空吸尘器,尤其涉及形成真空吸尘器的一部分的吸尘器头或地板工具。本发明特别涉及在这种吸尘器头中使用的旋转驱动的搅动器,无论吸尘器头是永久地还是可移除地固定在相应真空吸尘器上。真空吸尘器的类型对于本发明来说并不重要,因此本发明可以涉及所谓的有袋或无袋真空吸尘器。
背景技术:
2.真空清洁器具或更简单地说“真空吸尘器”通常包括配备有抽吸源和灰尘分离器的主体,其中吸尘器头通常通过可分离的联接器连接到灰尘分离器。吸尘器头具有吸入口,吸尘器头通过该吸入口与待清洁表面接合,并且载有污物的空气通过该吸入口朝向灰尘分离器被吸入真空吸尘器。吸尘器头在真空吸尘器从表面清除污物的有效性方面起着至关重要的作用,无论该表面是诸如木头或石头的硬地板覆盖物,还是诸如地毯的软地板覆盖物。因此,真空吸尘器制造商尽了很大努力来优化吸尘器头设计,以提高拾取性能。
3.一些吸尘器头是被动装置,其依靠静止元件比如所谓的“主动边缘”和刷毛条来从地板覆盖物上去除污物。这些类型的吸尘器头相对简单,但通常它们从表面清除污物的效果有限。通常,它们主要被推荐用于坚硬的表面。
4.传统上,最有效的吸尘器头包括某种动力刷杆或搅动器。已知的示例中,搅动器由涡轮驱动,涡轮由通过吸尘器头的气流致动。其他已知的装置包括使用布置成驱动搅动器的电动马达。在这些已知的布置中,通常马达通过合适的驱动连杆机构比如皮带或齿轮机构联接到搅动器,尽管马达容纳在搅动器内也是已知的,这提供了特别节省空间的布置。
5.在任一示例中,动力搅动器用于擦拭和拍打地板表面,以提高吸尘器头从该表面清除污物的能力。常见构造是搅动器带有从搅动器表面径向向外延伸的刷毛阵列。刷毛通常相对较硬,因此当搅动器旋转时,它们积极地接合地板表面,从而用作刮擦和击打地板表面以松动嵌入颗粒的手段。诸如橡胶和碳纤维丝之类的其他材料带可以用来为搅动器提供补充特性。举例来说,us8782851b2描述了一种搅动器,其可以设置有相对硬的刷毛、碳丝和橡胶条的组合。
6.重要的设计挑战是优化空气流过吸尘器头的方式,从吸尘器头处空气通过吸入口进入吸尘器头内部,到吸尘器头处空气从出口朝向灰尘分离器排出。众所周知,气流速度是拾取性能的重要因素,因为当空气流过工具的速度高时,污物颗粒被更有效地输送。对于诸如沙子的高能粒子来说尤其如此。由于小且相对重,这种颗粒倾向于从地板表面高速喷射并进入吸尘器头内部,在那里它们倾向于在吸尘器头周围无序地反弹。需要高气流速度来将空气中的污物颗粒带进吸尘器头内,并将这些颗粒从吸尘器头向集尘器输送出去。然而,在低气流速度下,这些重颗粒将更有可能沉积回到地板覆盖物上。因此,应当理解,保持良好的拾取性能是具有挑战性的,尤其是在较低的吸尘器头气流速度下。
7.尽管通过给真空吸尘器配备大功率真空马达可以实现高气流速度,但这通常是不希望的,因为这意味着机器效率较低,这是电池供电的真空吸尘器的显著缺点,其中能量效
率对可用运行时间有直接影响。因此,希望吸尘器头能够有效地从地板表面拾取相对较重的污物颗粒,而不需要高气流速度。
8.正是在这种背景下设计了本发明。
技术实现要素:
9.根据本发明的一方面,提供了一种用于真空清洁器具的吸尘器头,该吸尘器头包括:主体,其限定搅动器室,在该搅动器室内支撑有可旋转的搅动器组件,以及吸入口,搅动器组件的一部分通过该吸入口伸出以接合待清洁表面,其中主体包括前部和后部,后部限定吸尘器头的排出口;并且其中前部包括偏转板,该偏转板包括偏转表面,该偏转表面在使用中受到由搅动器组件的旋转激发的污物颗粒的冲击,并且其中偏转表面构造成使被激发的污物颗粒在向上的方向上偏转,并且在远离吸入口且朝向吸尘器头的排出口的方向上越过搅动器组件偏转。这样,污物颗粒的初始能量用于将它们引向排出口,同时避免任何偶然的碰撞,这种碰撞会导致污物颗粒由于无意碰撞或者由于未能被夹带到通过灰尘通道的气流中而返回搅动器室。这不仅提高了吸尘器头的拾取性能,而且降低了通过吸尘器头的空气流速,从而降低了真空清洁器具的能耗。
10.优选地,偏转板包括多个偏转表面,它们共同布置成在横截面上限定菲涅耳反射器。通过具有多个偏转表面系列,可以使用一系列顺序且定向碰撞来降低污物颗粒的能量。通过布置多个偏转表面以在横截面上限定菲涅耳反射器,污物颗粒可被引导到公共点,可能是吸尘器头中气流最大的地方。
11.优选地,偏转板包括多个偏转面板,每个偏转面板包括多个偏转表面中的相应偏转表面。
12.优选地,多个偏转板在与搅动器组件的纵向轴线基本对齐的方向上并排布置。这确保由搅动器组件激发的所有污物颗粒都被导向多个偏转板。
13.优选地,多个偏转面板以弧形方式布置。
14.优选地,排出口限定排出口轴线,并且多个偏转表面中的一个或多个偏转表面从排出口轴线成角度地偏移相应的偏移角。这种布置为从偏转表面偏转越过搅动器组件朝向排出口的污物颗粒建立最短路径。
15.优选地,多个偏转表面中的每个偏转表面位于距离排出口轴线上的点相应面板距离处,并且其中对于相应的偏转表面,面板距离与其偏移角成比例。这种布置确保偏转表面定位在吸入口的前面,而不管它们相对于排出口的定向如何。
16.优选地,多个偏转表面中与排出口轴线成角度偏移的一个或多个偏转表面与从一个或多个偏转表面延伸以与排出口轴线相交的假想线具有基本垂直的关系。
17.优选地,多个偏转表面中的一个或多个偏转表面包括第一表面部分和第二表面部分,所述表面部分被大致水平的分割线分开。
18.优选地,第一表面部分构造成在朝向第二表面部分的方向上偏转被激发的污物颗粒。
19.优选地,第二表面部分构造成越过搅动器组件的方向上偏转被激发的污物颗粒。更优选地,第二表面部分构造成越过搅动器组件的方向上偏转被第一表面部分偏转的被激发的污物颗粒。
20.优选地,第一和/或第二表面部分在竖直截面中具有凹形轮廓。
21.优选地,第一和/或第二表面部分在水平截面中具有凹形轮廓。由于偏转表面的凹度,污物颗粒偏转的路径因此朝向一点变窄。这种布置避免被偏转的污物颗粒和前部的侧壁之间的任何有意的相互作用,其会耗散被偏转的污物颗粒的能量,并使它们保留在前部中,或者甚至返回到搅动器室中。
22.优选地,偏转板至少部分地限定越过搅动器组件向后延伸的灰尘通道。灰尘通道为污物颗粒建立从搅动器室延伸到排出口的气流回路。
23.优选地,灰尘通道包括用于接收来自搅动器室的被激发的污物颗粒的入口和与排出口连通的出口。
24.优选地,灰尘通道的入口基本在搅动器组件的纵向宽度上延伸。这确保由搅动器组件激发的所有污物颗粒都被导入灰尘通道。
25.优选地,灰尘通道的宽度在入口和出口之间逐渐变小。这增加了朝向灰尘通道出口的气流速度。
26.优选地,主体还包括部分地限定灰尘通道的中部。
27.优选地,前部可从主体移除。前部可从主体移除的事实使得它能与吸尘器头的其它部件分开清洗。
28.优选地,偏转表面可枢转地附接到主体。
29.根据本发明的另一方面,提供了一种真空清洁器具,其包括根据前述方面的吸尘器头。
30.在本技术的范围内,很明显,在前面的段落中、在权利要求中和/或在下面的描述和附图中阐述的各个方面、实施例、示例和替代方案,特别是其单独的特征,可以独立地或以任何组合的方式采用。也就是说,所有实施例和/或任何实施例的特征可以任何方式和/或组合进行组合,除非这些特征是不兼容的。申请人保留更改任何最初提交的权利要求或相应地提交任何新权利要求的权利,包括修改任何最初提交的权利要求以从属于和/或结合任何其他权利要求的任何特征的权利,尽管最初并未以这种方式要求权利。
附图说明
31.现在将参考附图,仅通过示例描述本发明的上述和其他方面,其中:
32.图1是包括根据本发明实施例的吸尘器头的真空吸尘器的前透视图;
33.图2是图1的吸尘器头的前透视图;
34.图3是图1的吸尘器头的仰视图;
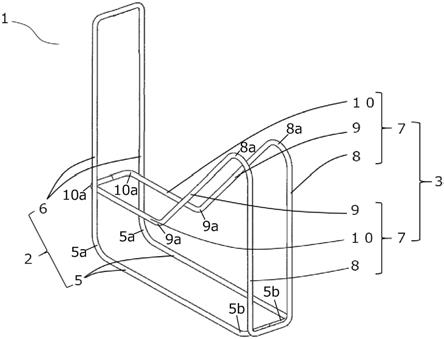
35.图4a是图1的吸尘器头的前部的后透视图;
36.图4b是图4a的前部的水平剖视图;以及
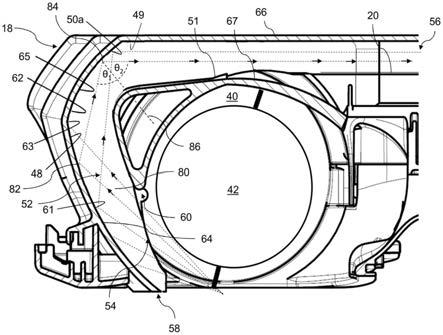
37.图5是穿过图1的吸尘器头中心的竖直截面示意图。
38.在附图中,相同的特征由相同的附图标记表示。
具体实施方式
39.现在将描述本发明的具体实施例,其中将详细讨论多个特征,以便提供对权利要求中定义的发明概念的透彻理解。然而,对于本领域技术人员来说显而易见的是,本发明可
以在没有具体细节的情况下实施,并且在某些情况下,为了避免不必要地模糊本发明,没有详细描述公知的方法、技术和结构。此外,在下面的描述中,对“左”、“右”和任何其他具有隐含定向的术语的引用并不旨在进行限制,而是仅指如附图中所示的特征的定向。
40.图1示出了根据本发明实施例的真空清洁器具或真空吸尘器2,其包括污物和灰尘分离单元4、马达驱动的风扇单元6和吸尘器头10。真空吸尘器2还包括连接污物和灰尘分离单元4与吸尘器头10的杆8。马达驱动的风扇单元6通过吸尘器头10从待清洁表面比如地板表面将携带污物的空气抽吸到污物和灰尘分离单元4,其中污物和灰尘颗粒从携带污物的空气中分离,并且相对干净的空气从真空吸尘器2中排出。在该示例中示出的污物和灰尘分离单元4是旋风分离单元,但本领域技术人员将理解,分离单元4对于本发明并不重要,并且旋风分离单元可以用替代的分离单元或不同分离单元的组合来替换。类似地,真空吸尘器2的性质对于本发明并不重要。图1所示的真空吸尘器2是杆式真空吸尘器,但应当理解,这里公开的吸尘器头10可以用于其他类型的真空吸尘器,例如立式或筒式真空吸尘器。
41.参考图2,吸尘器头10包括可旋转地附接到联接器14的主体12,联接器14可移除地连接到杆8。然而,对于本领域读者来说,很明显,本发明也旨在涵盖构造成永久固定到它们相应真空吸尘器上的吸尘器头。
42.主体12包括壳体16,其包括前部、中部和后部18、20、22以及下主体板部或底板24。前部18在中部20的中心部分上向后延伸,并通过可释放的紧固件(未示出)连接到底板24,该紧固件可插入穿过形成在底板24中的凹部,使得前部18可从主体12移除。底板24限定大致矩形的吸入口28,在使用中,携带污物的空气通过该吸入口从待清洁表面比如地板表面被吸入吸尘器头10。联接器14包括由滚动组件34支撑的导管,用于将吸尘器头10支撑在地板表面上。导管包括连接到形成在壳体16的后部22中的排出口32的前部分,以及可枢转地连接到前部分的后部分。限定导管的后部分的联接器14的部分包括用于将联接器14的自由端38连接到杆8的固定装置36。刚性弯曲软管装置保持在导管内,并在导管的前部分和后部分之间延伸。
43.参照图3,两个轮子27安装在底板24的底表面中的凹陷部分内,用于将吸尘器头10支撑在地板表面上。轮子27构造成当吸尘器头10位于硬地板表面上时将底板24支撑在地板表面上方,并且构造成当吸尘器头10位于铺有地毯的地板表面上时沉入地毯的绒毛中,以使底板24的底表面能够接合地毯的纤维。底板24可相对于壳体16移动,允许它在清洁过程中平稳地浮在铺有地毯的地板表面上。
44.主体12的内部容积包括搅动器室40,其部分地由壳体16的中部20和底板24限定。吸尘器头10还包括搅动器组件42,其包括安装在搅动器室40内的大致圆柱形本体44,本体44可绕其纵向轴线旋转。圆柱形本体44容纳电动马达和驱动机构,该驱动机构将搅动器组件42连接到电动马达,用于绕其纵向轴线驱动圆柱形本体44。这种搅动器驱动装置是已知的,因此不再详细解释。搅动器组件42还包括从圆柱形本体44的外径向表面向外延伸的多个搅动器46。搅动器46可以包括多个软丝中的一个或多个,具有在与地板表面接触时可以相对于圆柱形本体44弯曲的尖端、硬刷毛或连续材料带,并且可以由碳纤维或尼龙制成,仅举两个普通材料的示例。搅动器组件42布置成使得搅动器46随着其旋转穿过吸入口28突出,以将污物和灰尘颗粒以及其它碎屑(下文中称为“污物颗粒”)从硬地板表面和地毯表面扫入搅动器室40。在该示例中,电动马达和驱动机构布置成使搅动器组件42在这样的方向
上旋转,使得搅动器46朝向壳体16的后部22向后扫过地板表面。在这种情况下,由搅动器组件42的旋转激发的大部分污物颗粒被扫向搅动器室40的后部,一小部分但仍很显著比例的污物颗粒被向前甩向搅动器室40的前部。
45.搅动器室40与灰尘通道52流体连通,灰尘通道52由壳体16的前部18的内侧49限定,用于接收由搅动器组件42向前甩向搅动器室40前部的污物颗粒。参考图4a,在本示例中,壳体16的前部18包括偏转板47、顶面板66和两个侧壁76、78,偏转板47布置成位于底板24中的吸入口28的前方,顶面板66从偏转板47的上端基本水平地延伸。偏转板47至少部分地限定灰尘通道52。通常成形为扇形的顶面板66和两个侧壁76、78会聚以限定出口56,当吸尘器头10被组装时,该出口56与形成在壳体16的后部22中的排出口32流体连通,从而建立从搅动器室40到排出口32的穿过灰尘通道52的空气流动回路。
46.偏转板47包括多个偏转面板48,通常在与搅动器组件42的纵向轴线基本对齐的方向上并排布置。在该示例中,偏转板47包括五个分立的偏转面板48,其内表面限定相应的偏转表面,通常用50a、50b、50c表示。偏转面板48各自包括第一面板部分61和位于第一面板部分61上方的第二面板部分62,第二面板部分由大致水平的分割线63从第一面板部分61分开。类似地,偏转表面50a、50b、50c各自包括位于第一面板部分61的内侧的第一表面部分64和位于第二面板部分62的内侧的第二表面部分65。一般来说,偏转表面50a、50b、50c构造成在使用中使由搅动器组件42通过灰尘通道52向前甩出的污物颗粒在向上的方向上偏转,并越过搅动器组件42朝向出口56偏转。
47.参考图4b,偏转面板48布置成使得偏转表面50a、50b、50c在横截面上共同限定菲涅耳反射器。也就是说,偏转表面50a、50b、50c(其水平横截面在该示例中具有略微凹入的轮廓)以弧形方式布置,以便使污物颗粒通过灰尘通道52直接朝向出口56偏转。在该示例中,因为灰尘通道52的出口56位于中心,所以它与排出口32的纵向轴线68(下文中称为“排出口轴线68”)对齐。这种布置确保灰尘通道52的出口56和吸尘器头10的区域之间的直接流体连接,在使用中,吸尘器头10的该区域经历最大的压降,且吸力也如此。然而,本领域读者将认识到,将灰尘通道52的出口56与排出口轴线68对齐并不是必须的,并且出口56可以替代地定位成使得其相对于排出口轴线68不对齐,同时仍保持与排出口32的流体连接。
48.在横截面中,中心偏转表面50a基本垂直于排出口轴线68定向,以便沿着从偏转表面50a到出口56变窄的路径在搅动器组件42上方将污物颗粒朝向出口56偏转,而剩余的偏转表面50b、50c与排出口轴线68成角度地偏移相应的偏移角。具体地,邻近中心偏转表面50a的偏转表面50b相对于排出口轴线68偏移第一偏移角α,而最外侧偏转表面50c相对于排出口轴线68偏移第二偏移角β,其大于第一偏移角α。在吸尘器头10的该示例中,偏移角α、β被选择成使得在偏转表面50b、50c和它们与排出口轴线68相交的点之间延伸的假想线72、74与偏转表面50b、50c具有基本垂直的关系。这种布置为从偏转表面50b、50c越过搅动器组件42朝向出口56偏转的污物颗粒建立最短路径。由于偏转表面50b、50c的凹度,污物颗粒偏转的路径因此朝向假想线72、74与排出口轴线68相交的点71变窄。这种布置避免偏转的污物颗粒和前部18的侧壁76、78之间的任何有意的相互作用,其会耗散偏转的污物颗粒的能量。
49.偏转表面50a、50b、50c位于距离排出口轴线68上的点71相应的面板距离处,这是相对于排出口轴线68和假想线72、74测量的。在本示例中,点71位于出口56附近的排出口轴
线68上。每个偏转表面50a、50b、50c的面板距离与其偏移角成比例。也就是说,偏转表面50a、50b、50c的面板距离随着偏移角的增加而增加。因此,在本示例中,位于中央的偏转表面50a的面板距离最小,因为其相对于排出口轴线68的偏移角为零,但面板距离相对于偏转表面50b增加,偏转表面50b相对于排出口轴线68成第一偏移角α。对于最外侧偏转表面50c,面板距离进一步增加,因为它们相对于排出口轴线68成第二偏移角β,其大于第一偏移角α。这种布置确保偏转表面50a、50b、50c定位在吸入口28的前方,而不管它们相对于排出口轴线68的定向如何。
50.参照图5,该图示出了偏转表面50a的竖直截面,壳体16的前部18的内侧49和中部20的最外侧51限定灰尘通道52,其包括入口54和出口56,入口54用于接收来自搅动器室40的被激发的污物颗粒。如上所述,出口56与形成在壳体16的后部22中的排出口32流体连通,以便建立从搅动器室40到排出口32通过灰尘通道52的空气流动回路。灰尘通道52的入口54在搅动器组件42的纵向宽度上基本水平地延伸,并且在该示例中,部分地限定在偏转面板48的下端58和壳体16的中部20的下端60之间。在其他示例中,灰尘通道52的入口54可以至少部分地由偏转表面50a、50b、50c的下边缘限定。
51.偏转表面50a的第一表面部分64在竖直截面中具有凹形轮廓,并且通常面向灰尘通道52的入口54,并且从其下边缘向前和向上延伸到水平分割线63。第二表面部分65在竖直截面中也具有凹形轮廓,并且通常跨过中部20的上侧67面向后,这部分地限定灰尘通道52。第二表面部分65从水平分割线63向上和向后延伸,以与壳体16的前部18的顶面板66连接。在该实施例中,水平分割线63限定第一和第二表面部分64、65之间的交叉,尽管本领域读者将理解第一和第二表面部分64、65不一定需要交叉。此外,尽管图5仅示出了偏转表面50a的横截面,但本领域读者将会理解,偏转表面50b、50c被类似地布置。
52.如上所述,入口54接收由搅动器组件42的旋转从搅动器室40向前甩出的被激发的污物颗粒,在图5中通常由箭头80表示。在进入灰尘通道52时,污物颗粒的初始能量通常太高,以至于污物颗粒不能立即被夹带在穿过灰尘通道52的气流内。以前,这个问题是通过构造限定灰尘通道的壁来解决的,以通过一系列偶然的碰撞将污物颗粒保持在灰尘通道内,直到污物颗粒的能量通过与壁的碰撞而充分消散,以使它们能够被夹带在通过灰尘通道的气流内。然而,这有可能使污物颗粒由于无意碰撞或者由于未能被灰尘通道的气流带走而返回搅动器室。本发明的不同之处在于,通过使用与偏转表面50a、50b、50c的一系列连续有目的的碰撞,污物颗粒的初始能量用于引导它们通过灰尘通道52朝向排出口32,同时避免任何偶然的碰撞。具体地,每个偏转表面50a、50b、50c构造成使得通过与第一表面部分64的第一碰撞和与第二表面部分65的第二碰撞,被激发的污物颗粒被引导通过灰尘通道52到达排出口32。
53.当从搅动器室40通过入口54进入灰尘通道52时,被激发的污物颗粒将首先倾向于撞击第一面板部分61。第一表面部分64的凹度使得第一面板部分61基本向上朝着第二面板部分62偏转与其碰撞的基本所有被激发的污物颗粒。第二表面部分65的凹度使得不管被第一表面部分64偏转的被激发的污物颗粒的入射角如何,第二面板部分62都将基本水平朝着出口56和由此的排出口32偏转基本所有与其碰撞的被激发的污物颗粒。通过将第一表面部分64上的点与第二表面部分65上的相应点配对来实现被激发的污物颗粒的该轨迹,使得撞击第一表面部分64上的第一点82的大多数被激发的污物颗粒将被引导至第二表面部分65
上的相应的第二点84。第一和第二表面部分64、65在它们相应点82、84处的局部曲率使得污物颗粒撞击点82、84相对于垂直于点82、84的相应线86的角度θ1等于污物颗粒偏转的角度θ2。这种布置类似于反射定律,其中入射光线的角度等于反射光线的角度。在第二面板部分62之后,通过与第一和第二面板部分61、62的碰撞,污物颗粒的能量已经消散,使得它们更可能被夹带在通过灰尘通道52的气流中。因此,偏转表面50a、50b、50c没有构造成将污物颗粒保持在灰尘通道52内(这可能使污物颗粒由于无意碰撞或者由于未被夹带到通过灰尘通道52的气流中而返回到搅动器室40),而是将污物颗粒引向吸尘器头10的气流最大的区域,因此它们更可能被夹带在其中。
54.在不脱离由所附权利要求限定的本发明的范围的情况下,可以对上述示例进行多个修改。
55.例如,偏转表面50a、50b、50c在图4b中示出为在水平截面中具有凹形轮廓。这种布置具有在碰撞第一和第二表面部分64、65之后使污物颗粒的路径变窄的效果。路径的该变窄可能导致大部分偏转的污物颗粒在通过灰尘通道52的途中相互碰撞,并且可能希望通过使用在水平截面中具有直或平面轮廓的偏转表面50a、50b、50c来防止路径变窄,从而最小化这些颗粒间的碰撞。可替代地,一些偏转表面50a、50b、50c可以具有凹形轮廓,而剩余的偏转表面50a、50b、50c可以具有直轮廓。
56.此外,在吸尘器头10的本示例中,通过与第一表面部分64的初始碰撞以及随后与第二表面部分65的碰撞,被激发的部分颗粒被引导通过灰尘通道52。这些连续碰撞引导污物颗粒通过灰尘通道52到达出口56,其中污物颗粒的能量被充分耗散,从而被灰尘通道52中的气流夹带。然而,可能希望以更大的量耗散污物颗粒的能量,在这种情况下,每个偏转表面50a、50b、50c可以包括三个或更多个表面部分,这些表面部分构造成通过一系列三次或更多次碰撞来耗散污物颗粒的能量。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。