技术特征:
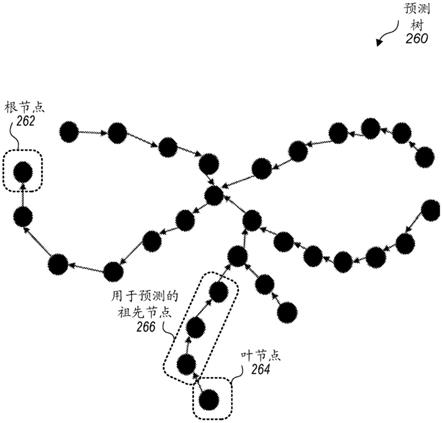
1.一种或多种非暂态计算机可读存储介质,所述一种或多种非暂态计算机可读存储介质存储程序指令,所述程序指令当在一个或多个计算设备上或跨所述一个或多个计算设备执行时使得所述一个或多个计算设备:生成预测树,所述预测树包括多个节点,所述多个节点与构成点云的多个点对应,所述点云从一个或多个传感器捕获,其中所述点中的相应点包括所述点的空间信息,并且其中在生成所述预测树时,所述程序指令使得所述一个或多个计算设备:选择所述多个点中的个别点用于包括在所述预测树中的所述多个节点中;确定根据应用于所述点中的所述个别点的一个或多个祖先节点的相应预测技术确定的所述点中的所述个别点的相应预测节点值,其中所述祖先节点被包括在所述预测树中;对来自所述预测树的关于所述多个节点的节点信息进行编码,其中对于给定节点,编码后的节点信息包括为了确定所述给定节点的相应预测节点值所应用的相应预测技术的指示符;以及发送或存储所述编码后的节点信息。2.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中所述预测节点值是所选择点中的所述个别点的预测空间值。3.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中所述预测节点值是所选择点中的所述个别点的预测属性值。4.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中所述程序指令还使得所述一个或多个计算设备:确定所述预测节点值的校正值,其中基于以下项来确定所述校正值:所述点中的所述个别点中与所述节点对应的一个点的预测空间位置和所述点云中的所述个别点的空间位置之间的空间差;或者所述点中的所述个别点中与所述节点对应的一个点的预测属性值和所述点云中的所述个别点的属性值之间的属性值差,其中对来自所述预测树的所述节点信息进行编码包括对与所述预测树的所述节点相关联的所确定的校正值进行编码。5.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中所述程序指令还使得所述一个或多个计算设备:针对所述预测树的相应节点确定属于所述预测树的相应节点中的个别节点的子节点的数量,其中对来自所述预测树的所述节点信息进行编码包括对关于所述预测树的相应节点的子节点信息进行编码。6.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中用于确定所述预测节点值中的一个预测节点值的相应预测技术不同于用于确定所述预测节点值中的另一个预测节点值的相应预测技术。7.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中用于确定所述相应节点的预测节点值的所述预测技术选自一组支持的预测技术,包括:不预测,其中对子节点的节点值在不进行预测的情况下编码;差量预测技术,其中子节点的节点值被预测为与父节点的节点值的差值;
线性预测技术,其中基于子节点的父节点和祖父节点之间的关系来预测所述子节点的节点值;平行四边形预测技术,其中基于子节点的父节点、祖父节点和曾祖父节点之间的关系来确定所述子节点的节点值。8.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中,在所述选择所述多个点中的所述个别点用于包括在所述预测树中的所述多个节点中时,所述程序指令使得所述一个或多个计算设备:根据针对所述多个点确定的空间填充曲线值来选择所述多个点;并且其中,在确定根据应用于所述预测树中的一个或多个祖先节点的相应预测技术确定的所述点中的所述个别点的相应预测节点值时,所述程序指令使得所述一个或多个计算设备:基于先前添加到所述预测树的节点的节点值来评估可能的祖先节点的k-d树。9.根据权利要求1所述的一种或多种非暂态计算机可读存储介质,其中,在选择所述多个点中的所述个别点用于包括在所述预测树中的所述多个节点中时,所述程序指令使得所述一个或多个计算设备:根据接收到所述多个点的顺序来选择所述多个点;并且其中,在确定根据应用于所述预测树中的一个或多个祖先节点的相应预测技术确定的所述点中的所述个别点的相应预测节点值时,所述程序指令使得所述一个或多个计算设备:基于所述多个点中的至少一些点的缓冲区中包括的节点的节点值,将所述缓冲区评估为可能的祖先节点。10.一种或多种非暂态计算机可读存储介质,所述一种或多种非暂态计算机可读存储介质存储程序指令,所述程序指令当在一个或多个计算设备上或跨所述一个或多个计算设备执行时使得所述一个或多个计算设备:接收关于与点云中的多个点对应的节点的经编码节点信息;对所述经编码节点信息进行解码,其中在对所述经编码节点信息进行解码时,所述程序指令使得所述一个或多个计算设备进一步:根据所述节点信息中包括的用于子节点的预测技术来对相应指示的子节点进行解码;以及存储或渲染从所述节点信息解码的所述点云中的所述多个点。11.根据权利要求10所述的一种或多种非暂态计算机可读存储介质,其中所述经编码节点信息还包括所述预测节点值的校正值,其中为了对所述相应指示的子节点进行解码,所述程序指令当在所述一个或多个计算设备上执行或跨所述一个或多个计算设备执行时使得所述一个或多个计算设备进一步:基于所述节点信息中包括的用于所述子节点中的个别子节点的相应预测技术来确定所述子节点中的所述个别子节点的相应预测节点值,其中将所述预测技术应用于所述个别子节点的一个或多个祖先节点来预测所述个别子节点的所述节点值;以及应用所述节点信息中包括的关于所述相应节点的所述校正值来确定所述子节点中的所述个别子节点的重建节点值。
12.根据权利要求11所述的一种或多种非暂态计算机可读存储介质,其中所述子节点中的所述个别子节点的所述重建节点值包括:关于所述子节点中的所述个别子节点的重建空间信息;或者所述子节点中的所述个别子节点的重建属性值。13.根据权利要求10所述的一种或多种非暂态计算机可读存储介质,其中所述经编码节点信息另外指示所述子节点中的所述个别子节点的祖先节点-子节点关系,其中所述节点信息中包括的用于所述子节点中的所述个别子节点的所述预测技术指示所述个别子节点的祖先节点,来自所述祖先节点的节点值在用于所述个别子节点的所述预测技术中用作输入。14.根据权利要求10所述的一种或多种非暂态计算机可读存储介质,其中所接收到的经编码节点信息是关于所述点云的第一细节级别(lod)的节点的,其中所述程序指令当由所述一个或多个计算设备执行时还使得所述一个或多个计算设备:接收关于所述点云的第二细节级别的其他节点的附加经编码节点信息;对所述附加经编码节点信息进行解码,其中在对所述附加经编码节点信息进行解码时,所述程序指令使得所述一个或多个计算设备进一步:根据所述附加节点信息中包括的用于所述第二细节级别的子节点的预测技术对所述第二细节级别的相应指示的子节点进行解码;以及存储或渲染所述点云中的所述多个点,包括所述第一细节级别(lod)的点和所述第二细节级别(lod)的点。15.根据权利要求14所述的一种或多种非暂态计算机可读存储介质,其中对于所述第二细节级别的所述子节点中的至少一些子节点,用于所述至少一些子节点的所述预测技术基于所述第一细节级别中的祖先节点的节点值来预测所述第二细节级别的所述子节点的节点值。16.根据权利要求10所述的一种或多种非暂态计算机可读存储介质,其中所述经编码节点信息包括关于多个时间帧的节点信息,并且其中所述节点信息中包括的用于所述子节点中的所述个别子节点的所述预测技术中的至少一些预测技术包括:使用所述时间帧中的其他时间帧中包括的所述子节点中的所述个别子节点的祖先节点来预测所述时间帧中的不同时间帧中的所述节点中的所述个别节点的节点值的预测技术。17.一种系统,所述系统包括:存储器,所述存储器存储程序指令;和一个或多个处理器,所述一个或多个处理器被配置为执行所述程序指令以进行以下操作:生成预测树,所述预测树包括多个节点,所述多个节点与构成点云的多个点对应,所述点云从一个或多个传感器捕获,其中所述点中的相应点包括所述点的空间信息,并且其中在生成所述预测树时,所述程序指令使得所述一个或多个计算设备:选择所述多个点中的个别点用于包括在所述预测树中的所述多个节点中;确定根据应用于所述预测树中的一个或多个祖先节点的相应预测技术确定的所述点中的所述个别点的相应预测节点值;
对来自所述预测树的节点信息进行编码,其中对于给定节点,编码后的节点信息包括为了确定所述给定节点的相应预测节点值所应用的相应预测技术的指示符;以及发送或存储所述编码后的节点信息。18.根据权利要求17所述的系统,还包括:所述一个或多个传感器,其中所述一个或多个传感器是lidar传感器。19.根据权利要求17所述的系统,其中所述程序指令当由所述一个或多个处理器执行时还使得所述一个或多个处理器:确定所述预测节点值的校正值,其中基于以下项来确定所述校正值:所述点中的所述个别点中与所述节点对应的一个点的预测空间位置和所述点云中的所述个别点的空间位置之间的空间差;或者所述点中的所述个别点中与所述节点对应的一个点的预测属性值和所述点云中的所述个别点的属性值之间的属性值差,其中对来自所述预测树的所述节点信息进行编码包括对与所述预测树的所述节点相关联的所确定的校正值进行编码。20.根据权利要求17所述的系统,其中所述程序指令当由所述一个或多个处理器执行时还使得所述一个或多个处理器:执行速率失真优化(rdo)分析以选择要用于预测所述预测树的节点的节点值的所述相应预测技术。
技术总结
编码器被配置为使用预测树来压缩点云几何信息。添加到该预测树的节点的祖先节点可用于根据预测技术来确定要添加的该节点的预测值。该预测树可被编码并且可被提供用于传输到可重新生成点云的解码器。可重新生成点云的解码器。可重新生成点云的解码器。
技术研发人员:K
受保护的技术使用者:苹果公司
技术研发日:2020.10.02
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。