1.本发明涉及码头作业,尤其是一种面向无人集卡的码头作业动态管理系统。
背景技术:
2.随着现代港口竞争的不断加剧,如何提高港区作业设备利用率、降低作业成本已经成为港区提高服务水平、提升自身竞争力的重要研究课题;无人驾驶在港区的应用呼之欲出,无人集卡在港区的场地作业时,需要和龙门吊、桥吊、流机等多种作业设备进行交互式作业,且多辆无人集卡在场地同时作业时需要进行协同调度。
3.传统的集卡作业是人工根据集装箱码头操作系统下发的信息流数据(信息流数据包括指令或文字或语音)进行水平运输操作,人工长时间重复作业容易疲劳存在安全隐患,且人工驾驶存在太多不确定性,单机效率因个人主观能动性不同而造成效率差异,集卡的作业效率无法提升,从而影响了港口的整体作业效率。
技术实现要素:
4.本发明所要解决的技术问题是提供一种面向无人集卡的码头作业动态管理系统,提高了码头面作业安全性,降低了人员成本,还提高了港口的作业效率。
5.本发明解决上述技术问题所采用的技术方案为:一种面向无人集卡的码头作业动态管理系统,包括指令系统、通讯模块、感知系统、地图系统、规则引擎、决策系统和码头设备;所述的指令系统与集装箱码头操作系统电信号连接,用于接收集装箱码头操作系统发布的信息流数据,解析后得到对应的业务指令,并将业务指令通过所述的通讯模块分发至对应的码头设备;所述的码头设备包括多台安装有定位设备、激光雷达和摄像头的桥吊、多台安装有定位设备的流机、多台安装有定位设备和摄像头的龙门吊、多台安装有定位设备的装卸锁岗亭、多台安装有定位设备的有人集卡和多台安装有定位设备的无人集卡;所述的感知系统包括安装在所述的桥吊上的桥吊感知模块、安装在所述的流机上的流机感知模块、安装在所述的龙门吊上的龙门吊感知模块、安装在所述的装卸锁岗亭上的集中装卸锁感知模块和安装在所述的有人集卡及所述的无人集卡上的集卡感知模块;所述的桥吊感知模块,用于通过所述的通讯模块发布桥吊的状态数据;所述的桥吊的状态数据包括桥吊的实时位置、桥吊的实时速度、桥吊的实时移动方向、桥吊的作业状态、桥吊吊具的上下移动位置、桥吊吊具的移动速度、桥吊吊具抓取集装箱时的尺寸、桥吊驾驶室移动信息、有人集卡和无人集卡的实时对位信息、对应的绑定车道信息和桥吊作业指令池的完成情况;所述的桥吊的作业状态包括正在作业、空闲和无法作业;所述的桥吊作业指令池存放有所述的指令系统分发的业务指令;所述的流机感知模块,用于通过所述的通讯模块发布流机的状态数据;所述的流机的状态数据包括流机的实时位置、流机的实时速度、流机的实时移动方向、有人集卡和无人集卡的实时对位信息和流机作业指令池的完成情况;所述的流机作业指令池存放有所述
的指令系统分发的业务指令;所述的龙门吊感知模块,用于通过所述的通讯模块发布龙门吊的状态数据;所述的龙门吊的状态数据包括龙门吊的实时位置、龙门吊的实时速度、龙门吊的实时移动方向、龙门吊的作业状态、龙门吊吊具的上下移动位置、龙门吊吊具的移动速度、龙门吊吊具抓取集装箱时的尺寸、龙门吊驾驶室移动信息、有人集卡和无人集卡的实时对位信息和龙门吊作业指令池的完成情况;所述的龙门吊的作业状态包括正在作业、空闲和无法作业;所述的龙门吊作业指令池存放有所述的指令系统分发的业务指令;所述的集中装卸锁感知模块,用于通过所述的通讯模块发布装卸锁岗亭的位置信息和装卸锁完成情况;所述的集卡感知模块,用于通过所述的通讯模块发布有人集卡的状态数据和无人集卡的状态数据;所述的有人集卡的状态数据包括有人集卡的实时位置、有人集卡的实时速度、有人集卡的实时移动方向、有人集卡作业指令池的完成情况;所述的有人集卡作业指令池存放有所述的指令系统分发的业务指令;所述的无人集卡的状态数据包括无人集卡的物理尺寸、无人集卡的实时位置、无人集卡的实时速度、无人集卡的实时移动方向、无人集卡进入堆场的进入申请、无人集卡的到位信息、无人集卡的机械状态、无人集卡作业指令池的完成情况;所述的无人集卡的机械状态包括无人集卡的轮胎的转向和无人集卡的刹车压力强度;所述的无人集卡作业指令池存放有所述的指令系统分发的业务指令;所述的地图系统包括地图构建模块、地图路径规划模块和地图展示模块;所述的地图构建模块,利用实时查分定位技术对场地进行测绘,建模后得到高精度地图;所述的地图路径规划模块,基于高精度地图根据感知系统发布的桥吊的状态数据、流机的状态数据、龙门吊的状态数据、装卸锁岗亭的位置信息、装卸锁完成情况、有人集卡的状态数据、无人集卡的状态数据和各个码头设备接收到的业务指令,采用全局最佳路径方法为各个码头设备规划路径,得到各个码头设备对应的最佳路径并通过所述的通讯模块发布;所述的地图展示模块电性连接显示屏,在显示屏上展示高精度地图上各个码头设备对应的实时位置和对应的最佳路径;所述的规则引擎,用于存放根据业务场景动态调整的码头作业规则;所述的业务场景包括无人集卡正常作业行驶场景、无人集卡进入堆场场景、堆场中龙门吊参与作业场景、堆场中流机参与作业场景、无人集卡前往码头面作业场景、装卸锁作业场景和根据实际作业情况需要增加的未知作业场景;所述的决策系统,根据无人集卡接收的业务指令选择相应的业务场景,并根据选择的业务场景中涉及的码头设备所对应的状态数据从规则引擎中选择对应的规则进行业务指令的匹配得到业务指令的匹配结果,将业务指令的匹配结果通过所述的通讯模块发送至无人集卡;所述的无人集卡接收到所述的决策系统发送的业务指令的匹配结果,并根据业务指令的匹配结果执行业务指令。
6.所述的流机包括正面吊和堆高机,所述的通讯模块采用通信协议,所述的业务指令的匹配结果包括继续前进指令或等待指令或超车指令或绕行指令或对位指令或装锁指
令或卸锁指令。
7.所述的决策系统根据无人集卡接收的业务指令选择相应的业务场景,并根据选择的业务场景中涉及的码头设备所对应的状态数据从规则引擎中选择对应的规则进行业务指令的匹配得到业务指令的匹配结果,将业务指令的匹配结果通过所述的通讯模块发送至无人集卡的过程具体如下:当业务场景为无人集卡正常作业行驶场景时:根据感知系统发布的桥吊的状态数据、流机的状态数据、龙门吊的状态数据、装卸锁岗亭的位置信息、装卸锁完成情况、有人集卡的状态数据、无人集卡的状态数据和各个码头设备接收到的业务指令进行运动趋势推算,得到当前或一段时间内无人集卡正常作业行驶场景,决策系统根据无人集卡正常作业行驶场景确定无人集卡正常作业行驶规则,并根据无人集卡正常作业行驶规则对无人集卡发布绕行指令或等待指令或继续前进指令;当业务场景为无人集卡进入堆场场景时:无人集卡在进入堆场区域前,集卡感知模块发布进入申请,根据感知模块发布的无人集卡的状态数据和龙门吊的状态数据以及地图系统中发布的无人集卡对应的最佳路径和龙门吊对应的最佳路径,得到无人集卡进入堆场场景,决策系统根据无人集卡进入堆场场景确定无人集卡进入堆场规则,并根据无人集卡进入堆场规则对无人集卡发布继续前进指令或绕行指令,当要进入该堆场区域的码头设备加上该堆场区域内已有的码头设备超出堆场拥堵数量时,决策系统对除了发送进入申请的无人集卡发送绕行指令;当发送进入申请的无人集卡的业务指令对应的作业车道上有其他无人集卡作业时,根据集卡感知模块发布的无人集卡的状态数据判断该无人集卡能否通过超车达到业务指令对应的堆场作业点,若是,则决策系统对该无人集卡发送超车指令;若不是,则决策系统对该无人集卡发送等待指令;决策系统对除了上述的无人集卡发送继续前进指令;当业务场景为堆场中龙门吊参与作业场景时:无人集卡进入堆场后,当无人集卡到达业务指令对应的堆场作业点后集卡感知模块发布到位信息,根据龙门吊感知模块发布的龙门吊的状态信息,决策系统对该无人集卡发送对位指令;当业务场景为堆场中流机参与作业场景时:无人集卡进入堆场后,当无人集卡到达业务指令对应的堆场作业点后集卡感知模块发布到位信息,根据流机感知模块发布的流机的状态信息,决策系统对该无人集卡发送对位指令;当业务场景为无人集卡前往码头面作业场景时:当无人集卡完成装箱作业前往码头面进行作业时,若码头面上作业的无人集卡数量超过码头面上允许作业的无人集卡数量时,根据业务指令的优先级原则依次对无人集卡开放路权,得到无人集卡前往码头面作业场景,决策系统根据无人集卡前往码头面作业场景确定无人集卡前往码头面作业规则,并根据无人集卡前往码头面作业规则对无人集卡发送等待指令或继续前进指令,当无人集卡达到业务指令对应的码头面作业点后,决策系统根据集卡感知模块发布的无人集卡的状态数据和桥吊感知模块发布的桥吊的状态数据,对该无人集卡发送对位指令;当业务场景为集中装卸锁作业场景时:无人集卡完成装箱作业后,根据船图以及集中装卸锁感知模块发布的装卸锁岗亭的位置信息和装卸锁完成情况,决策系统对需要装锁的无人集卡发送装锁指令,对需要卸锁的无人集卡发送卸锁指令。
8.根据无人集卡正常作业行驶场景确定无人集卡正常作业行驶规则的具体方法如
下:设定最大拥堵数量,将无人集卡当前位置记为a,路径记为b,根据公式计算该无人集卡的路径,其中v表示该无人集卡的速度,t表示一段时间,当多台无人集卡的路径出现了重合或低于阈值时,判断无人集卡的行驶符合交通规则还是自定义规则,若无人集卡的行驶符合交通规则,则该无人集卡继续前进;若无人集卡的行驶符合自定义规则,则该无人集卡等待;当多台无人集卡的路径出现重合但高于阈值时,判断无人集卡的数量是否超过设定的最大拥堵数量,若是,则无人集卡绕行;若不是,则无人集卡继续前进。
9.所述的阈值为10m,所述的交通规则为基于城市道路的正常交通规则,所述的自定义规则为当龙门吊作业时,无人集卡需等待。
10.根据无人集卡进入堆场场景确定无人集卡进入堆场规则的具体方法如下:根据地图系统中得到的无人集卡对应的最佳路径和龙门吊对应的最佳路径,将无人集卡当前所在位置至业务指令对应的堆场作业点的各个路口标记为节点,将龙门吊当前所在位置至业务指令对应的目标位置的各个路口标记为节点,将无人集卡当前所在位置记为 x
车iy车j
,无人集卡的堆场作业点记为x
车my车n
,龙门吊当前所在位置记为 x
龙i y
龙j
,龙门吊的目标位置记为x
龙my龙n
,其中,x表示场地号,y表示箱区号,x
车i
、x
车m
、x
龙i
、x
龙m
∈[1,2,3,4,5,6,7],y
车j
、y
车n
、y
龙j
、y
龙n
∈[a,b,c,...,x,y,z],其中因无人集卡的行进限制,车m=车m,a进一位后标定为b,b进一位后标定为c,以此类推,y进一位后标定为z;若 x
车iy车j = x
龙iy龙j 或 x
车iy车j = x
龙my龙n 或 x
车my车n
=x
龙iy龙j 或 x
车my车n =x
龙m y
龙n
,则无人集卡禁止通行,无人集卡需绕行;若| x
车i
ꢀ‑ꢀ
x
龙i |》1或 | x
车i
ꢀ‑ꢀ
x
龙m |》1或 | x
龙i
ꢀ‑
( x
车m
)|》1或 | x
车i 1
‑ꢀ
x
龙m |》1或| y
车j
ꢀ‑ꢀy龙j |》1或| y
龙j
ꢀ‑ꢀy龙n |》1或| y
龙j
ꢀ‑ꢀy车n |》1或| y
车n
ꢀ‑ꢀy龙n |》1,则无人集卡可以通行,无人集卡继续前进;若龙门吊的业务指令对应的作业车道在海侧且龙门吊从小贝进出,则x
龙i-1y龙j-1
、x
龙i-1y龙j
、x
龙iy龙j-1
、x
龙iy龙j
所对应的箱区围成的路口以及x
龙iy龙j-1
、x
龙iy龙j
所对应的箱区之间的作业车道禁止无人集卡通行,无人集卡需绕行;若龙门吊的业务指令对应的作业车道在海侧且龙门吊从大贝进出,则x
龙iy龙j-1
、x
龙iy龙j
、x
龙i 1y龙j-1
、x
龙i 1y龙j
所对应的箱区围成的路口禁止无人集卡通行,无人集卡需绕行;若龙门吊的业务指令对应的作业车道在路侧且龙门吊从小贝进出,则x
龙i-1y龙j
、x
龙i-1y龙j 1
、x
龙iy龙j
、x
龙iy龙j 1
所对应的箱区围成的路口以及x
龙iy龙j-1
、x
龙iy龙j
所对应的箱区之间的作业车道禁止无人集卡通行,无人集卡需绕行;若龙门吊的业务指令对应的作业车道在路侧且龙门吊从大贝进出,则x
龙iy龙j
、x
龙iy龙j 1
、x
龙i 1y龙j
、x
龙i 1y龙j 2
所对应的箱区围成的路口禁止无人集卡通行,无人集卡需绕行。
[0011]
根据无人集卡前往码头面作业场景确定无人集卡前往码头面作业规则的具体方法如下:判断无人集卡当前所在的车道是否为业务指令中的车道,若无人集卡当前所在的车道是作业指令中的车道,则判断无人集卡当前所在的车道内是否有其他无人集卡正在作业,若有则无人集卡等待,若没有,则判断无人集卡当前所在的车道是否形成关路,若是则无人集卡等待,若不是则无人集卡继续前进;若无人集卡当前所在的车道不是作业指令中
的车道,则判断无人集卡当前所在的车道是否形成关路,若是,则无人集卡等待,若不是,则无人集卡继续前进;所述的关路是指当桥吊感知模块发布的桥吊的状态数据表明桥吊正在作业时,该桥吊对应的绑定车道形成关路。
[0012]
所述的堆场拥堵数量根据业务场景设定,所述的码头面上允许作业的无人集卡数量根据业务场景设定。
[0013]
与现有技术相比,本发明的优点在于通过设置指令系统、通讯模块、感知系统、地图系统、规则引擎、决策系统,结合码头的业务场景,协同多台桥吊、多台流机、多台龙门吊、多台装卸锁岗亭、多台有人集卡和多台无人集卡,基于规则引擎中动态调整的码头作业规则,为无人集卡提供了高效的作业信息交互服务,减少了无人集卡的空等时间,提高了码头整体作业效率,且在减少人力成本的同时,增加了码头工作的安全性。
附图说明
[0014]
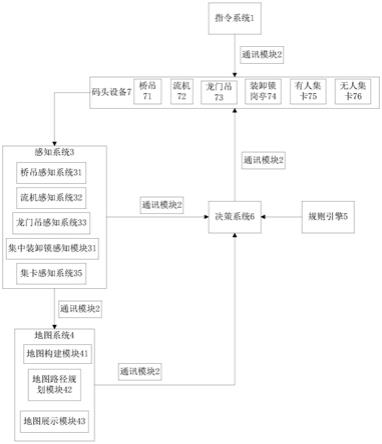
图1为本发明的整体系统框架示意图;图2为本发明实施例中的部分堆场示意图。
具体实施方式
[0015]
以下结合附图实施例对本发明作进一步详细描述。
[0016]
如图1所示,一种面向无人集卡的码头作业动态管理系统,包括指令系统1、通讯模块2、感知系统3、地图系统4、规则引擎5、决策系统6和码头设备7;通讯模块2采用通信协议,通信协议包括http协议、jt808协议等;指令系统1与集装箱码头操作系统电信号连接,用于接收集装箱码头操作系统发布的信息流数据,解析后得到对应的业务指令,并将业务指令通过通讯模块2分发至对应的码头设备7;码头设备7包括多台安装有定位设备、激光雷达和摄像头的桥吊71、多台安装有定位设备的流机72、多台安装有定位设备和摄像头的龙门吊73、多台安装有定位设备的装卸锁岗亭74、多台安装有定位设备的有人集卡75和多台安装有定位设备的无人集卡76;流机72包括正面吊和堆高机;感知系统3包括安装在桥吊71上的桥吊感知模块31、安装在流机72上的流机感知模块32、安装在龙门吊73上的龙门吊感知模块33、安装在装卸锁岗亭74上的集中装卸锁感知模块34和安装在有人集卡75及无人集卡76上的集卡感知模块35;桥吊感知模块31,用于通过通讯模块2发布桥吊71的状态数据;桥吊71的状态数据包括桥吊71的实时位置、桥吊71的实时速度、桥吊71的实时移动方向、桥吊71的作业状态、桥吊71吊具的上下移动位置、桥吊71吊具的移动速度、桥吊71吊具抓取集装箱时的尺寸、桥吊71驾驶室移动信息、有人集卡75和无人集卡76的实时对位信息、对应的绑定车道信息和桥吊71作业指令池的完成情况;桥吊71的作业状态包括正在作业、空闲和无法作业;桥吊71作业指令池存放有指令系统1分发的业务指令;流机感知模块32,用于通过通讯模块2发布流机72的状态数据;流机72的状态数据包括流机72的实时位置、流机72的实时速度、流机72的实时移动方向、有人集卡75和无人集卡76的实时对位信息和流机72作业指令池的完成情况;流机72作业指令池存放有指令系统1分发的业务指令;
龙门吊感知模块33,用于通过通讯模块2发布龙门吊73的状态数据;龙门吊73的状态数据包括龙门吊73的实时位置、龙门吊73的实时速度、龙门吊73的实时移动方向、龙门吊73的作业状态、龙门吊73吊具的上下移动位置、龙门吊73吊具的移动速度、龙门吊73吊具抓取集装箱时的尺寸、龙门吊73驾驶室移动信息、有人集卡75和无人集卡76的实时对位信息和龙门吊73作业指令池的完成情况;龙门吊73的作业状态包括正在作业、空闲和无法作业;龙门吊73作业指令池存放有指令系统1分发的业务指令;集中装卸锁感知模块34,用于通过通讯模块2发布装卸锁岗亭74的位置信息和装卸锁完成情况;集卡感知模块35,用于通过通讯模块2发布有人集卡75的状态数据和无人集卡76的状态数据;有人集卡75的状态数据包括有人集卡75的实时位置、有人集卡75的实时速度、有人集卡75的实时移动方向、有人集卡75作业指令池的完成情况;有人集卡75作业指令池存放有指令系统1分发的业务指令;无人集卡76的状态数据包括无人集卡76的物理尺寸、无人集卡76的实时位置、无人集卡76的实时速度、无人集卡76的实时移动方向、无人集卡76进入堆场的进入申请、无人集卡76的到位信息、无人集卡76的机械状态、无人集卡76作业指令池的完成情况;无人集卡76的机械状态包括无人集卡76的轮胎的转向和无人集卡76的刹车压力强度;无人集卡76作业指令池存放有指令系统1分发的业务指令;地图系统4包括地图构建模块41、地图路径规划模块42和地图展示模块43;地图构建模块41,利用实时查分定位技术对场地进行测绘,建模后得到高精度地图;地图路径规划模块42,基于高精度地图根据感知系统3发布的桥吊71的状态数据、流机72的状态数据、龙门吊73的状态数据、装卸锁岗亭74的位置信息、装卸锁完成情况、有人集卡75的状态数据、无人集卡76的状态数据和各个码头设备7接收到的业务指令,采用全局最佳路径方法为各个码头设备7规划路径,得到各个码头设备7对应的最佳路径并通过通讯模块2发布;地图展示模块43电性连接显示屏,在显示屏上展示高精度地图上各个码头设备7对应的实时位置和对应的最佳路径;规则引擎5,用于存放根据业务场景动态调整的码头作业规则;业务场景包括无人集卡76正常作业行驶场景、无人集卡76进入堆场场景、堆场中龙门吊73参与作业场景、堆场中流机72参与作业场景、无人集卡76前往码头面作业场景、装卸锁作业场景和根据实际作业情况需要增加的未知作业场景;决策系统6,根据无人集卡76接收的业务指令选择相应的业务场景,并根据选择的业务场景中涉及的码头设备7所对应的状态数据从规则引擎5中选择对应的规则进行业务指令的匹配得到业务指令的匹配结果,将业务指令的匹配结果通过通讯模块2发送至无人集卡76,业务指令的匹配结果包括继续前进指令或等待指令或超车指令或绕行指令或对位指令或装锁指令或卸锁指令;无人集卡76接收到决策系统6发送的业务指令的匹配结果,并根据业务指令的匹配结果执行业务指令。
[0017]
在本实施例中,决策系统6根据无人集卡76接收的业务指令选择相应的业务场景,并根据选择的业务场景中涉及的码头设备7所对应的状态数据从规则引擎5中选择对应的
规则进行业务指令的匹配得到业务指令的匹配结果,将业务指令的匹配结果通过所述的通讯模块2发送至无人集卡76的过程具体如下:当业务场景为无人集卡76正常作业行驶场景时:根据感知系统3发布的桥吊71的状态数据、流机72的状态数据、龙门吊73的状态数据、装卸锁岗亭74的位置信息、装卸锁完成情况、有人集卡75的状态数据、无人集卡76的状态数据和各个码头设备7接收到的业务指令进行运动趋势推算,得到当前或一段时间内无人集卡76正常作业行驶场景,决策系统6根据无人集卡76正常作业行驶场景确定无人集卡76正常作业行驶规则,并根据无人集卡76正常作业行驶规则对无人集卡76发布绕行指令或等待指令或继续前进指令;其中根据无人集卡76正常作业行驶场景确定无人集卡76正常作业行驶规则的具体方法如下:设定最大拥堵数量,将无人集卡76当前位置记为a,路径记为b,根据公式计算该无人集卡76的路径,其中v表示该无人集卡76的速度,t表示一段时间,当多台无人集卡76的路径出现了重合或低于阈值时,判断无人集卡76的行驶符合交通规则还是自定义规则,若无人集卡76的行驶符合交通规则,则该无人集卡76继续前进;若无人集卡76的行驶符合自定义规则,则该无人集卡76等待;当多台无人集卡76的路径出现重合但高于阈值时,判断无人集卡76的数量是否超过设定的最大拥堵数量,若是,则无人集卡76绕行;若不是,则无人集卡76继续前进;其中阈值为10m,交通规则为基于城市道路的正常交通规则,参考科目一,自定义规则为当龙门吊73作业时,无人集卡76需等待;当业务场景为无人集卡76进入堆场场景时:无人集卡76在进入堆场区域前,集卡感知模块35发布进入申请,根据感知模块发布的无人集卡76的状态数据和龙门吊73的状态数据以及地图系统4中发布的无人集卡76对应的最佳路径和龙门吊73对应的最佳路径,得到无人集卡76进入堆场场景,决策系统6根据无人集卡76进入堆场场景确定无人集卡76进入堆场规则,并根据无人集卡76进入堆场规则对无人集卡76发布继续前进指令或绕行指令,当要进入该堆场区域的码头设备7加上该堆场区域内已有的码头设备7超出堆场拥堵数量时,决策系统6对除了发送进入申请的无人集卡76发送绕行指令;当发送进入申请的无人集卡76的业务指令对应的作业车道上有其他无人集卡76作业时,根据集卡感知模块35发布的无人集卡76的状态数据判断该无人集卡76能否通过超车达到业务指令对应的堆场作业点,若是,则决策系统6对该无人集卡76发送超车指令;若不是,则决策系统6对该无人集卡76发送等待指令;决策系统6对除了上述的无人集卡76发送继续前进指令;其中根据无人集卡76进入堆场场景确定无人集卡76进入堆场规则的具体方法如下:根据地图系统4中得到的无人集卡76对应的最佳路径和龙门吊73对应的最佳路径,将无人集卡76当前所在位置至业务指令对应的堆场作业点的各个路口标记为节点,将龙门吊73当前所在位置至业务指令对应的目标位置的各个路口标记为节点,将无人集卡76当前所在位置记为x
车iy车j
,无人集卡76的堆场作业点记为x
车my车n
,龙门吊73当前所在位置记为x
龙iy龙j
,龙门吊73的目标位置记为x
龙my龙n
,其中,x表示场地号,y表示箱区号,x
车i
、x
车m
、x
龙i
、x
龙m
∈[1,2,3,4,5,6,7],y
车j
、y
车n
、y
龙j
、y
龙n
∈[a,b,c,...,x,y,z],其中因无人集卡76的行进限制,车m=车m,a进一位后标定为b,b进一位后标定为c,以此类推,y进一位后标定为z;若x
车iy车j
=x
龙iy龙j
或x
车iy车j
=x
龙my龙n
或x
车my车n
=x
龙iy龙j
或x
车my车n =x
龙my龙n
,则无人集卡76
禁止通行,无人集卡76需绕行;若| x
车i
ꢀ‑ꢀ
x
龙i |》1或| x
车i
ꢀ‑ꢀ
x
龙m |》1或| x
龙i
ꢀ‑
( x
车m
)|》1或| x
车i 1
‑ꢀ
x
龙m |》1或| y
车j
ꢀ‑ꢀy龙j |》1或| y
龙j
ꢀ‑ꢀy龙n |》1或| y
龙j
ꢀ‑ꢀy车n |》1或| y
车n
ꢀ‑ꢀy龙n |》1,则无人集卡76可以通行,无人集卡76继续前进,其中||表示绝对值;若龙门吊73的业务指令对应的作业车道在海侧且龙门吊73从小贝进出,则x
龙i-1y龙j-1
、x
龙i-1y龙j
、x
龙iy龙j-1
、x
龙iy龙j
所对应的箱区围成的路口以及x
龙iy龙j-1
、x
龙iy龙j
所对应的箱区之间的作业车道禁止无人集卡76通行,无人集卡76需绕行;如图2所示,当龙门吊73从2b进出,则1a、1b、2a、2b所对应的箱区围成的路口以及2a、2b所对应的箱区之间的作业车道禁止无人集卡76通行;若龙门吊73的业务指令对应的作业车道在海侧且龙门吊73从大贝进出,则x
龙iy龙j-1
、x
龙iy龙j
、x
龙i 1y龙j-1
、x
龙i 1y龙j
所对应的箱区围成的路口禁止无人集卡76通行,无人集卡76需绕行;如图2所示,当龙门吊73从2b进出,则2a、2b、3a、3b所对应的箱区围成的路口禁止无人集卡76通行;若龙门吊73的业务指令对应的作业车道在路侧且龙门吊73从小贝进出,则x
龙i-1y龙j
、x
龙i-1y龙j 1
、x
龙iy龙j
、x
龙iy龙j 1
所对应的箱区围成的路口以及x
龙iy龙j-1
、x
龙iy龙j
所对应的箱区之间的作业车道禁止无人集卡76通行,无人集卡76需绕行;如图2所示,当龙门吊73从2a进出,则1a、1b、2a、2b所对应的箱区围成的路口以及2a、2b所对应的箱区之间的作业车道禁止无人集卡76通行;若龙门吊73的业务指令对应的作业车道在路侧且龙门吊73从大贝进出,则x
龙iy龙j
、x
龙iy龙j 1
、x
龙i 1y龙j
、x
龙i 1y龙j 2
所对应的箱区围成的路口禁止无人集卡76通行,无人集卡76需绕行;如图2所示,当龙门吊73从2a进出,则2a、2b、3a、3b所对应的箱区围成的路口禁止无人集卡76通行;当业务场景为堆场中龙门吊73参与作业场景时:无人集卡76进入堆场后,当无人集卡76到达业务指令对应的堆场作业点后集卡感知模块35发布到位信息,根据龙门吊感知模块33发布的龙门吊73的状态信息,决策系统6对该无人集卡76发送对位指令,无人集卡76根据对位指令完成对位后,龙门吊73通过龙门吊73吊具执行对应的业务指令;当业务场景为堆场中流机72参与作业场景时:无人集卡76进入堆场后,当无人集卡76到达业务指令对应的堆场作业点后集卡感知模块35发布到位信息,根据流机感知模块32发布的流机72的状态信息,决策系统6对该无人集卡76发送对位指令,无人集卡76根据对位指令完成对位后,流机72执行对应的业务指令;当业务场景为无人集卡76前往码头面作业场景时:当无人集卡76完成装箱作业前往码头面进行作业时,若码头面上作业的无人集卡76数量超过码头面上允许作业的无人集卡76数量时,根据业务指令的优先级原则依次对无人集卡76开放路权,得到无人集卡76前往码头面作业场景,决策系统6根据无人集卡76前往码头面作业场景确定无人集卡76前往码头面作业规则,并根据无人集卡76前往码头面作业规则对无人集卡76发送等待指令或继续前进指令,当无人集卡76达到业务指令对应的码头面作业点后,决策系统6根据集卡感知模块35发布的无人集卡76的状态数据和桥吊感知模块31发布的桥吊71的状态数据,对该无人集卡76发送对位指令,无人集卡76根据对位指令完成对位后,桥吊71通过桥吊71吊具执行对应的业务指令;其中码头面上允许作业的无人集卡76数量根据业务场景设定;
根据无人集卡76前往码头面作业场景确定无人集卡76前往码头面作业规则的具体方法如下:判断无人集卡76当前所在的车道是否为业务指令中的车道,若无人集卡76当前所在的车道是作业指令中的车道,则判断无人集卡76当前所在的车道内是否有其他无人集卡76正在作业,若有则无人集卡76等待,若没有,则判断无人集卡76当前所在的车道是否形成关路,若是则无人集卡76等待,若不是则无人集卡76继续前进;若无人集卡76当前所在的车道不是作业指令中的车道,则判断无人集卡76当前所在的车道是否形成关路,若是,则无人集卡76等待,若不是,则无人集卡76继续前进;关路是指当桥吊感知模块31发布的桥吊71的状态数据表明桥吊71正在作业时,该桥吊71对应的绑定车道形成关路。
[0018]
当业务场景为集中装卸锁作业场景时:无人集卡76完成装箱作业后,根据船图以及集中装卸锁感知模块34发布的装卸锁岗亭74的位置信息和装卸锁完成情况,决策系统6对需要装锁的无人集卡76发送装锁指令,对需要卸锁的无人集卡76发送卸锁指令,无人集卡76根据装锁指令或卸锁指令行驶到对应的装卸锁岗亭74完成装锁或卸锁。
[0019]
在装卸船作业上,使用本发明后的工作效率比原来未使用本发明提高了10%以上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。