1.本公开涉及用于手动挤乳汁的吸奶器。
背景技术:
2.例如专利文献1所示,吸奶器具备:主体部,装配有贴合乳房的罩和存储乳汁的瓶;以及手动的手柄,可转动地装配在主体部。主体部具备:内部通道,连接吸奶口与瓶;以及隔膜,使内部通道产生负压。手柄可转动地被支承在主体部的上部,向瓶所在的下方延伸。并且,将罩贴合到乳房,将除拇指以外的四根手指放置到手柄,将拇指放置在主体部,使手柄以相对于主体部靠近的方式转动。于是,通过以隔膜被提起的方式变形,从而在内部通道产生负压,从乳头挤出的乳汁向内部通道流入。现有技术文献专利文献
3.专利文献1:日本特开2019-10350号公报
技术实现要素:
4.吸奶作业有时会持续进行10分钟左右,期望减轻对于前臂和手的肌肉负担。本公开的目的在于,提供能够减轻吸奶时的前臂和手中的肌肉负担的吸奶器。用于解决课题的手段
5.解决如上所述课题的吸奶器,具备:主体部,具备内部通道以及构成为在所述内部通道生成负压的负压生成机构以便进行吸奶,在前方具备装配有贴合乳房的罩的罩装配部,并且在下方具备装配有存储乳汁的瓶的瓶装配部;以及手柄,能够相对于所述主体部进行转动,在靠近相对于所述主体部的转动支点的一侧的基端部与所述负压生成机构连接,所述手柄,在前端侧具备指钩部,在所述主体部的侧方,从所述转动支点向前方延伸。根据上述结构,能够在旋后状态下进行吸奶操作,能够减轻桡侧腕长伸肌等前臂的肌肉负担。另外,能够使前臂接触到乳房下方的躯干,容易保持前臂的姿势。
6.在上述吸奶器中,也可以是如下结构:所述手柄在所述指钩部的靠所述转动支点侧的相邻位置具备手指限制部。根据上述结构,使用者能够通过除拇指以外的四个手指来操作手柄,能够通过手指限制部限制食指的侧面(指根)抵接到主体部。
7.在所述吸奶器中,也可以是如下结构:所述指钩部具备整体以直线形状构成、或者至少向所述罩的方向弯曲的部分。根据上述结构,在指钩部特别具备向罩方向弯曲的部分时,能够在使小指靠近拇指球的状态下操作手柄。
8.在上述吸奶器中,也可以是如下结构:所述主体部具备配置在所述罩的下方的支承部。根据上述结构,能够将使用者的拇指球肌的区域放置在支承部,能够减轻对于拇指球肌的负担。
9.在上述吸奶器中,也可以是如下结构:所述支承部是构成为限制所述手柄的转动范围的限制部。根据上述结构,能够防止手柄过度转动。
10.在上述吸奶器中,也可以是如下所述的结构:所述主体部具备形成在所述瓶装配部与所述支承部之间的凹部。根据上述结构,能够防止食指的指根部向主体部碰撞。另外,能够容易使吸奶时的吸奶器的姿势稳定。
11.在上述吸奶器中,也可以是如下结构:所述负压生成机构具备:隔膜,堵住所述内部通道的端部,构成为与所述手柄连接,使所述内部通道产生负压;以及插入部,插入到所述内部通道,与所述隔膜连接。根据上述结构,由于插入部在内部通道内的姿势被限制,因此能够辅助进行转动的手柄的姿势。发明效果
12.本发明能够减轻吸奶时的前臂和手中的肌肉负担。
附图说明
13.图1是示出吸奶器的使用状态的立体图。图2是图1的吸奶器的分解立体图。图3是示出图1的吸奶器的内部通道为常压状态时的状态的剖视图。图4是示出图1的吸奶器的内部通道为负压状态时的状态的剖视图。图5是示出正在转动图1的吸奶器的手柄时的状态的立体图。图6的(a)是示出以往的在旋前状态下使用的吸奶器和在旋后状态下使用的本发明的吸奶器中的前臂姿势的图,(b)是说明旋后和旋前的图。图7是示出以往的在旋前状态下使用的吸奶器和在旋后状态下使用的本发明的吸奶器中的桡侧腕长伸肌的肌肉电位的图。图8是示出以往的在旋前状态下使用的吸奶器和在旋后状态下使用的本发明的吸奶器中的拇指球肌的肌肉电位的图。图9是图1的吸奶器的俯视图。
具体实施方式
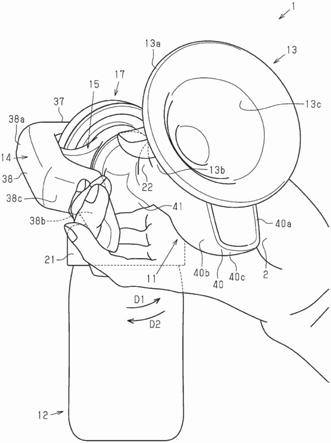
14.以下,参照图1~图5,对吸奶器进行说明。如图1所示,吸奶器1是具有使用者能够单手操作的大小的手动吸奶器,在使用者的手掌向上的旋后状态下使用。这种吸奶器1具备主体部11、瓶12、罩13、手柄14以及手柄座15。此处,将对于主体部11配置罩13的方向定义为前方,将手柄14的转动支点相对于主体部11的方向定义为后方。另外,将对于主体部11装配瓶12的方向定义为下方,将与瓶12相反的方向定义为上方。而且,将对于主体部11配置手柄14的方向及其相反方向定义为侧方。
15.主体部11是连接有存储乳汁的瓶12且装配罩13的构件。主体部11是轻量且硬质的合成树脂材料的成形品。具体地讲,主体部11由聚丙烯、聚碳酸酯、聚环烯烃、聚醚砜、聚苯砜等合成树脂材料形成。
16.如图2所示,主体部11具备瓶装配部21、罩装配部22以及内部通道23。瓶装配部21位于主体部11的下方。瓶12是存储乳汁的容器且具备瓶开口部12a。瓶开口部12a在构成开口的周壁的外周面具备外螺纹部12b。关于瓶开口部12a,通过代替主体部11装配人口乳头,从而还能够作为奶瓶来使用。瓶装配部21具有瓶开口部12a能够旋入的凹部,在内周面具备能够拧紧外螺纹部12b的内螺纹部21a。
17.罩装配部22形成为筒状,相对于瓶装配部21位于斜上方。罩13具有与乳房形状对应的圆顶形状或喇叭形状,具备贴合乳房的扩径部13a以及设置在扩径部13a的顶部的筒部13b。扩径部13a在内侧具有吸奶口13c。在扩径部13a中,在作为其开口端的外缘安装有弹性垫等,容易密接到乳房。筒部13b插入到罩装配部22并被嵌合。
18.如图3所示,内部通道23设置在主体部11的内部,在瓶装配部21与罩装配部22之间延伸并将它们彼此连接,并且向装配隔膜17的装配端部24延伸。换言之,内部通道23在瓶装配部21与罩装配部22与装配端部24之间延伸并将它们之间连接。内部通道23具备流入路径25、临时存储部26以及负压生成路径27。
19.流入路径25是将罩装配部22与临时存储部26连接并向临时存储部26下降的流路。临时存储部26是在负压产生时,将从流入路径25流入的乳汁暂时存储的空间部,向下方延伸并位于瓶装配部21的内侧。
20.临时存储部26的下端部装配有阀构件28,位于瓶开口部12a内。阀构件28为逆流防止阀,例如为鸭嘴阀。阀构件28抑制瓶12内的乳汁和空气向主体部11方逆流,并且将内部通道23与瓶12的内部空间隔开而使内部通道23成为负压状态。阀构件28由具有可挠性、弹性等的合成树脂材料成形,由硅橡胶、弹性体、天然橡胶等合成树脂材料形成。
21.阀构件28具备具有可挠性的一对舌片,在舌片之间构成缝隙。关于阀构件28,在内部通道23成为负压状态时,将舌片彼此密接,闭合缝隙。由此,临时存储部26的下端部被闭合,从流入路径25流入的乳汁被暂时存储。并且,在内部通道23成为常压时,舌片彼此分开,缝隙打开。由此,临时存储部26与瓶12的内部连通,存储在临时存储部26的乳汁流入瓶12内。
22.负压生成路径27是从临时存储部26分支的与流入路径25不同的通道。具体地讲,负压生成路径27是从临时存储部26的上端部或流入路径25的与临时存储部26的连接部分向与流入路径25相反的方向斜上方延伸的流路。负压生成路径27是比流入路径25粗的流路。另外,负压生成路径27是比临时存储部26粗的流路。负压生成路径27具有例如能够插入使用者的手指的程度的粗度。负压生成路径27的上端部是装配隔膜17的装配端部24。装配端部24具有向外侧扩展的凸缘形状,增大开口面积。
23.在如上所述构成的内部通道23,设置有用于使内部通道23生成负压的负压生成机构16。负压生成机构16具备隔膜17、上拉板18以及插入构件19。
24.隔膜17是在内部通道23生成负压的负压生成构件。隔膜17由具有可挠性、弹性等的合成树脂材料成形,由硅橡胶、弹性体、天然橡胶等合成树脂材料形成。隔膜17被装配为堵住装配端部24。内部通道23具有装配罩13的流入路径25的端部、装配阀构件28的临时存储部26的下端部以及装配隔膜17的装配端部24这三个端部。在罩13贴合到乳房且吸奶口13c被堵住时、即流入路径25的端部被堵住时,内部通道23的作为剩余端部的临时存储部26的下端部和装配端部24通过阀构件28和隔膜17而被堵住,从而内部通道23构成几乎密闭的空间。在隔膜17上配置有作为用于与手柄14连接的连接部的上拉板18。
25.上拉板18是比隔膜17硬的合成树脂材料的成形体,由聚碳酸酯、聚环烯烃、聚醚砜、聚苯砜等合成树脂材料形成。上拉板18是与手柄14的连接部,具备板部31和连接突起32。板部31配置于隔膜17的内表面。连接突起32在板部31中从与隔膜17相对的面的大致中央部突出设置。隔膜17在中央部具备贯通孔17a,连接突起32穿过贯通孔17a向隔膜17的外
侧突出。连接突起32的前端部为球形状,在球形状的下端部具备卡合槽32a。
26.在板部31装配有插入构件19。插入构件19具备插入部19a和装配凸缘19b。装配凸缘19b被装配为与板部31重叠。作为一例,装配凸缘19b也可以通过粘接剂等而被固定在板部31,外周部也可以卡止在设置于板部31的卡止片。另外,装配凸缘19b也可以通过超声波焊接、热焊接等焊接方法与板部31成为一体化。
27.插入部19a是从装配凸缘19b突出的具有圆柱形状的部分。插入部19a插入到负压生成路径27,作为对负压生成路径27的容积进行减容的减容部来发挥功能。插入部19a具有在外周面与负压生成路径27的内周面之间形成少许间隙部的程度的粗度。插入部19a是从装配凸缘19b突出的突出部,插入到具有内部空间的负压生成路径27。插入部19a的突出形状具有与所插入的负压生成路径27的内部形状对应的形状。作为一例,插入部19a是具有圆柱形状、或一端被堵塞的圆筒形状的突出部。相对于此,作为一例,负压生成路径27具有中空的圆筒形状,具有内部空间。插入部19a被设定为,具有比负压生成路径27的内径小的外径。
28.插入部19a在插入到负压生成路径27时,通过设置有间隙部,从而即使相对于负压生成路径27稍微倾斜也能够顺利地进行上下移动。另外,插入部19a具有在隔膜17被提起的状态下,不堵住流入路径25的向临时存储部26的出口的程度的长度,负压产生时,使乳汁能够从流入路径25流入临时存储部26。此处,插入部19a具有在隔膜17不变形的状态下,位于流入路径25的出口或临时存储部26的上端部的程度的长度。另外,插入部19a的前端部具有突出的三角形状,构成几乎能够堵住流入路径25的出口的形状。
29.手柄14通过手柄座15可转动地被支承在主体部11。手柄座15可转动地装配在隔膜17的装配端部24的具有筒状形状的根部。手柄座15具备装配部34和转动支承片35。装配部34具有c型形状。在装配端部24的根部,在周向上具备具有槽形状的引导部33。装配部34通过嵌合到引导部33,从而被装配为能够在周向上转动。由此,根据使用者的体形、手的大小、前臂的长度等来调整手柄14相对于主体部11的位置。转动支承片35是被设置为从装配部34向隔膜17的上方延伸的具有c型形状的延长片。转动支承片35的前端部具备成为对手柄14进行转动支承的转动轴的支轴部36。
30.手柄14由聚碳酸酯、聚环烯烃、聚醚砜、聚苯砜等合成树脂材料形成。手柄14具备提升部37和杠杆部38。提升部37是通过上拉板18提起隔膜17的部分,具备凹部37a。凹部37a的底表面具备卡合孔37b。上拉板18的连接突起32插通到卡合孔37b,卡合孔37b的周缘部卡合在卡合槽32a。由此,手柄14经由上拉板18与隔膜17连接,成为能够提起隔膜17的状态。另外,手柄14相对于连接突起32也能够旋转。
31.杠杆部38具有作为把手的功能,与罩13同样向前方延伸。其中,相对于罩13向主体部11的斜上方延伸,杠杆部38在主体部11的侧方向斜下方延伸。手柄14的外表面由曲面构成,以使手感良好,是使用者放置拇指以外的手指的区域。并且,杠杆部38具备:从提升部37一侧向外侧膨胀的弯曲部38a;以及接着弯曲部38a的指钩部38b。在弯曲部38a与指钩部38b之间设置有手指限制部38c。指钩部38b具有直线形状,具有至少能够配置除拇指以外的四个手指的长度。手指限制部38c是与指钩部38b的转动支点侧相邻设置并构成阶梯差的部分,食指的侧面抵接到该部分。由此,能够通过除拇指以外的四个手指来操作指钩部38b的手柄。
32.弯曲部38a的内侧是用于避开隔膜17和装配端部24的部分。在杠杆部38与提升部37的边界附近的位置、其其内侧,具备支轴部36被卡合的轴承部39。支轴部36以能够转动的状态被卡合到轴承部39,从而手柄14可转动地被支承在主体部11,该部分成为手柄14的转动支点。手柄14将该部分作为转动支点来进行往复移动。手柄14通过来自手的输入,向作为转动操作方向的箭头d1方向转动,通过隔膜17的弹性复原力,向作为复原方向的箭头d2方向转动。
33.在主体部11中,在罩13的下侧设置有支承部40。支承部40与罩装配部22成为一体,是从罩装配部22膨胀的膨胀部。支承部40具备:一对纵壁部40a、40b,从罩装配部22向下方延伸;以及横壁部40c,将一对纵壁部40a、40b的下端部连接。一对纵壁部40a、40b例如由平板构成,横壁部40c由向外侧鼓起的圆弧壁构成。在进行操作时,使用者的拇指球肌区域2放置在与手柄14相反的一侧的纵壁部40a和横壁部40c。另外,靠近手柄14一方的纵壁部40b是手柄14转动时抵接的限制部,限制手柄14转动过大。
34.在主体部11中,瓶装配部21与支承部40之间构成凹部41。具体地讲,凹部41构成为以横壁部40c逐渐向瓶装配部21方向靠近的方式倾斜。使用者的食指的指根部放置在凹部41。
35.对如上所述构成的吸奶器1的作用进行说明。如图3所示,关于吸奶器1,在进行吸奶作业时,将罩13朝向使用者乳房的方向,从下侧将拇指以外的手指放置在手柄14,在进行操作时,使用者的拇指球肌区域2放置在支承部40的与手柄14相反的一侧的纵壁部40a和横壁部40c。而且,食指的指根部放置在凹部41,拇指放置在罩装配部22的上侧。由此,通过使用者在旋后状态下把持吸奶器1。当罩13贴合到使用者的乳房以堵住吸奶口13c时,内部通道23构成几乎密闭的空间。此时,关于手柄14,根据使用者的体形等个体差异,以连接突起32为中心,手柄座15进一步被引导部33引导,从而相对于主体部11进行旋转,成为使用者容易进行手柄操作的状态。
36.如图4所示,当手柄14向箭头d1方向被转动操作时,隔膜17通过上拉板18被提起。于是,内部通道23成为负压状态,被吸奶的乳汁从流入路径25流入临时存储部26。在负压状态时,阀构件28闭合临时存储部26的底部,因此从流入路径25流入的乳汁被存储在临时存储部26。如图5所示,手柄14到抵接到支承部40的纵壁部40b为止转动。
37.当使用者松开把持力时,通过隔膜17的弹性复原作用,手柄14向箭头d2方向转动,内部通道23回到常压。由此,临时存储部26的阀构件28打开,乳汁向瓶12流入。通过使手柄14反复进行往复移动来进行吸奶作业。此时,插入部19a也在负压生成路径27内进行往复移动。插入部19a对负压生成路径27进行减容。因此,抑制伴随隔膜17变形的压力变化变小的情况。
38.插入部19a在其外周面与负压生成路径27的内周面之间形成有间隙部,因此能够顺利地进行往复移动。将拇指以外的四根手指从下侧放置到手柄14,把持手柄14来进行转动操作。因此,在手柄14施加使杠杆部38下降的力。另一方面,手柄14经由上拉板18与插入构件19连接,插入构件19通过插入部19a的外周面与负压生成路径27的内周面之间的微小的间隙部而被支承在负压生成路径27的内周面。因此,插入构件19被支承在负压生成路径27的内周面,其姿势稳定。由此,通过被负压生成路径27支承的插入构件19,也支承转动支点的周边,能够稳定地转动手柄14。即,能够减轻对于将手柄14与上拉板18连接的连接突起
32与卡合孔37b之间的连接部分的负荷。
39.另外,发明人如下所述进行了吸奶器1的效果确认。此处,使用本发明的吸奶器1和以往的吸奶器,测量了右上肢的前臂姿势和肌肉电位。如图6(a)和图6(b)所示,相对于以往的吸奶器是以旋前把持的模型,本发明的吸奶器1是以旋后把持的模型。图7是示出以往的在旋前状态下使用的吸奶器和在旋后状态下使用的本发明的吸奶器1中的前臂姿势的图。关于位于前臂且起到腕关节的桡侧弯曲的桡侧腕伸肌,在本发明的吸奶器1中,能够确认使用时的肌肉活动的减少。另外,图8是示出以往的在旋前状态下使用的吸奶器和在旋后状态下使用的本发明的吸奶器1中的拇指球肌的肌肉电位的图。关于位于手掌且起到拇指的弯曲和基于手掌的把握功能的拇指球肌,在本发明的吸奶器1中,能够确认使用时的肌肉活动的减少。
40.根据如上所述的吸奶器1,能够得到以下列举的效果。(1)吸奶器1能够在使用者的前臂处于旋后状态下进行吸奶操作。因此,能够减轻前臂的肌肉负担。
41.(2)手柄14在指钩部38b的靠转动支点侧的相邻位置具备手指限制部38c,因此能够通过除拇指以外的四个手指来进行操作。另外,能够通过手指限制部38c防止食指的侧面(指根)抵接到主体部。
42.(3)能够使使用者的拇指球肌区域2放置到支承部40,能够减轻对于使用者的拇指球肌的负担。(4)关于手柄14,通过抵接到支承部40的纵壁部40b,从而能够限制转动范围。
43.(5)能够使食指的指根部卡合到凹部41。因此,当在旋后状态下把持吸奶器1时,能够使吸奶器1的姿势稳定。(6)由于插入部19a在负压生成路径27内被支承,因此能够减轻手柄14被反复转动的正当中的手柄14对于转动支点的负荷。
44.(7)即使为了容易清洗内部通道23而加粗负压生成路径27,也由于在变粗的负压生成路径27插入插入部19a,因此能够抑制内部通道23的容积变大。由此,能够抑制内部通道23中的压力变化变小的情况,其结果,能够抑制吸奶效率的降低。
45.(8)插入构件19通过与上拉板一体地被固定,从而能够与上拉板18一体地进行操作。因此,抑制清洗作业和分解组装作业的复杂化。
46.另外,也可以如下所述变更上述实施方式。
·
负压生成路径27也可以相对于在支承部40或罩13的装配端部24的方向上延伸的中心轴线向手柄14的转动方向倾斜。向箭头d1方向转动的手柄14通过上拉板18将隔膜17提起的方向,不是对于隔膜17的主面垂直的方向,而是与其交叉的方向。根据隔膜17的提起方向,插入构件19进行往复移动的方向也向相同方向倾斜。因此,插入部19a被插入的负压生成路径27也向相同方向倾斜,从而能够更容易地转动手柄14。另外,能够进一步缩小插入部19a的外周面与负压生成路径27的内周面之间的间隙部。因此,抑制内部通道23的容积变大的情况。
47.·
拉板18与插入构件19也可以是一体成形的一个部件。由此,能够减少部件个数。
·
上拉板18也可以通过粘接等固定在隔膜17的外表面。此时,插入部19a一体地设置在隔膜17的内表面。
48.·
也可以省略上拉板18,将作为与手柄14的卡合孔37b连接的连接部的连接突起32设置在隔膜17的外表面。
·
插入部19a也可以相对于隔膜17分开。此时,作为一例,插入部19a通过将与装配凸缘19b的间隔维持恒定的间隔件而被连接。或者,插入部19a通过间隔件与上拉板18的板部31连接。作为一例,间隔件能够通过将插入部19a与装配凸缘19b或板部31连接的一个或多个线状构件或轴构件等构成。
49.·
也可以省略装配凸缘19b,将插入部19a一体设置在隔膜17,作为一个部件。通过如上所述的结构,也能够减少部件个数。
·
也可以不特别限定插入部19a的前端面的形状,除了突出的三角形状以外,也可以是平坦面,也可以是凹陷形状。
50.·
关于插入部19a,只要能够减少负压生成路径27的容积,则不特别限定其外周面的形状,例如,在侧视时,也可以是波状形状、凹状形状、凸状形状等。
51.·
插入部19a的突出形状也可以具有与所插入的负压生成路径27的内部形状对应的形状。例如,相对于具备具有中空圆筒形状的内部空间的负压生成路径27,插入部19a也可以具有三角柱、四角柱、六角柱等多角柱的突出形状(外部形状)。与此相反,相对于具有三角柱、四角柱、六角柱等多角柱的内部形状的负压生成路径27,插入部19a也可以具有圆柱或圆筒形状的突出形状。
52.·
也可以是省略插入构件19的结构。在省略插入构件19时,不需要对应于插入部19a而将负压生成路径27构成得粗,可以使内部通道23变细来抑制容积增加。
53.·
不特别限定内部通道23的结构,也可以是例如省略临时存储部26的结构。此时,也可以省略阀构件28。
·
主体部11也可以是省略凹部41的结构。此时,只要设置其他稳定支承手段,以能够在旋后状态下稳定地把持吸奶器1即可。
54.·
支承部40的纵壁部40b也可以不作为限制手柄14的转动范围的限制部来发挥功能。例如,只要在手柄座15的支轴部36或手柄14的轴承部39的附近设置限制转动范围的突起等即可。
55.·
主体部11也可以不在罩13的下方具备如向正下方延伸的支承部40。例如,支承部40也可以向手柄14一侧倾斜,也可以向与手柄14相反的一侧倾斜。另外,也可以省略支承部40。
56.·
插入部19a也可以成为如下结构:不设置外周面与负压生成路径27的内周面之间的间隙部,而是如注射器那样,将对于负压生成路径27的内表面密接的橡胶活塞设置在插入部19a的前端部,在内部通道23生成负压。
57.·
手柄14也可以不经由手柄座15而是直接被转动支承在主体部11。此时,转动支承片35和支轴部36与主体部11一体设置。
58.在上述的例子中,虽然手柄14的指钩部38b整体具有直线形状,但是也可以如图9所示,指钩部38b的前端部38x具有向相对于罩13的中心线13x靠近的方向弯曲的结构(点线部分)。由此,能够在使位于指钩部38b的前端侧的小指靠近拇指球的状态下操作手柄。另外,指钩部38b也可以向整体相对于罩13的中心线13x靠近的方向弯曲。
59.·
在以上的例子中,虽然对右撇子用的吸奶器1进行了说明,但是在左撇子用的情
况下,在图1中,只要使手柄14向相对于主体部11相反侧的侧方延伸即可。
60.·
手柄14和罩13延伸的方向也可以完全一致。另外,手柄14也可以不相对于主体部11向斜下方延伸,而是向斜上方延伸。
61.·
瓶12也可以无法相对于瓶装配部21进行拆装,而是成为一体。另外,罩13也可以不相对于罩装配部22进行拆装,而是成为一体。
·
流入路径25和临时存储部26也可以是具有例如能够插入使用者的手指程度的粗度的结构。附图标记说明
[0062]1…
吸奶器,2
…
拇指球肌区域,11
…
主体部,12
…
瓶,12a
…
瓶开口部,12b
…
外螺纹部,13
…
罩,13a
…
扩径部,13b
…
插入部,13c
…
吸奶口,13x
…
中心线,14
…
手柄,15
…
手柄座,16
…
负压生成机构,17
…
隔膜,17a
…
贯通孔,18
…
上拉板,19
…
插入构件,19a
…
插入部,19b
…
装配凸缘,21
…
瓶装配部,21a
…
内螺纹部,22
…
罩装配部,23
…
内部通道,24
…
装配端部,25
…
流入路径,26
…
临时存储部,27
…
负压生成路径,28
…
阀构件,31
…
板部,32
…
连接突起,32a
…
卡合槽,33
…
引导部,34
…
装配部,35
…
转动支承片,36
…
支轴部,37
…
提升部,37a
…
凹部,37b
…
卡合孔,38
…
杠杆部,38a
…
弯曲部,38b
…
指钩部,38c
…
手指限制部,38x
…
前端部,39
…
轴承部,40
…
支承部,40a
…
纵壁部,40b
…
纵壁部,40c
…
横壁部,41
…
凹部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。