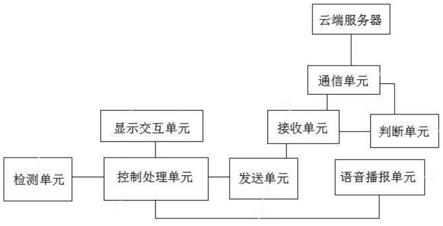
1.本发明提供一种可靠的基于状态信息预测的无人机智能巡检方法,实现对无人机下一时刻状态信息的预测。
背景技术:
2.本发明针对变电站下无人机巡检时将会遇到强电磁干扰而偏离预设巡检轨迹的问题,对无人机下一时刻状态信息进行实时监测,从而确保无人机智能巡检的可靠性和稳定性,快速识别出线路故障,确保线路安全,实现在合理规划下向人们提供稳定而高质量电能的目标。
技术实现要素:
3.建立无人机和变电站基站之间的可靠通信连接。通过无人机携带桶形天线的doa估计算法接收到的回波信号,来获取无人机相对于变电站基站的距离信息和方位角信息,从而通过俯仰角和水平角对无人机在变电站中的位置做出精准定位,为后续使用rnn对无人机下一时刻状态信息的预测提供可靠的训练数据支撑;
4.搭建巡检无人机的预设轨迹,实现对无人机下一时刻状态信息的精准预测。考虑到无人机在变电站巡检时会来回穿梭于高压设备的中间通道,无人机的预设轨迹可定义为l型轨迹,但由于气压和风向的影响,无人机会在原有预设轨迹的基础上发生一些偏移,因此无人机的实际巡检轨迹呈现出不规则的l型。基于无人机携带桶形天线doa估计算法结果峰值的俯仰角和水平角,设定特定的时间步长,输入到rnn模型中进行训练,从而预测出巡检无人机下一时刻的状态位置信息,从而提高无人机巡检系统的稳定通信和图像数据回传能力。
5.基于巡检无人机在变电站内的正常行为模型,对无人机巡检时产生的异常行为进行实时监测。基于rnn对无人机角度数据的训练,在对无人机下一时刻位置信息进行预测的同时也能获取巡检无人机在变电站内的正常行为模型,且通过应用训练好的无人机正常行为模型,可以实时监测到巡检时的异常行为。针对异常监测本发明采用奇异值检测方法。当阈值太大时,意味着对巡检无人机偏离正常行为模型的容忍度更大,这将导致无人机的一些异常行为无法被正常检测到,从而降低异常检测的准确性。当阈值太小时,表示无人机偏离正常行为模型的容差范围太小,检测方案将错误地检测到无人机被外界风向气压影响而产生的微小便宜,从而将影响本发明检测方法的性能。因此,为了监测无人机的异常行为,需要通过大量实验来选取合适的阈值,通过比较无人机正常行为模型提供的巡检无人机位置信息和无人机实际位置信息之间的nrmse和选取阈值之间的关系,实现无人机的异常行为监测。
6.基于变电站下基于状态信息预测的无人机智能巡检方法,及时让地面巡检人员对无人机的异常行为做出调整和纠正,实现无人机摄像头拍摄照片的实时回传,确保无人机智能巡检的可靠性和稳定性,快速识别出线路故障,确保线路安全,实现在合理规划下向人
们提供稳定而高质量电能的目标。
附图说明
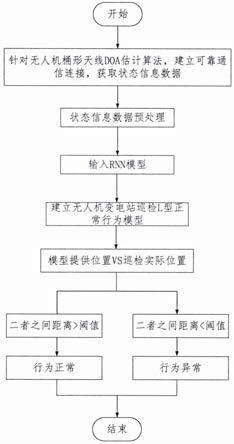
7.图1无人机智能巡检方法流程图
8.图2桶形天线doa估计算法的仿真结果
9.图3数据预处理过程
10.图4基于网格的数据整合坐标系
11.图5无人机的异常行为监测
具体实施方式
12.流程如附图1所示,首先为了建立变电站基站和无人机之间可靠的通信连接,针对无人机桶形天线得doa估计算法,获取巡检无人机的状态信息角度数据,通过对获取角度数据的一系列复杂预处理,来适应rnn的网络模型结构,建立无人机变电站巡检的l型正常行为模型,然后通过对比正常行为模型提供位置与无人机巡检时的实际运行位置之间的阈值,来监测无人机的异常行为:当二者之间的nrmse值大于所选阈值时,无人机的行为被定义为异常,当二者之间的nrmse值小于所选阈值时,被定义为正常行为,从而确保了无人机智能巡检的可靠性和稳定性。
13.1.无人机和变电站基站之间可靠通信连接的建立
14.本发明对巡检无人机使用桶形来建立无人机与基站之间可靠的通信连接,并采用子阵列划分的方法来消除由金属桶形体的“阴影效应”引起的不完整信号导向向量,从而提升桶形天线doa估计的性能。此外,通过对桶形天线接收端信噪比snr和桶形天线环形阵元数量的仿真实验,来获取本发明的最佳天线参数。
15.假设有m个数组元素均匀分布在圆周上,并且如果圆心是坐标原点,则第m个数按在组元素的坐标为(r,φm),其中r是圆柱的半径,φm是天线中数组元素的水平角,φm=2(m-1)π/m,(m=1,2,...k)。假设从远场θi(i=1,2,...k)方向入射k(k<m)个不相关的同频窄带信号到天线阵列上,并且信号与阵列在同一平面上,则阵列在时间t接收到的数据可以表示为,
16.x(t)=f
·
as(t) n(t)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
17.其中x(t)=[x1(t),...,x2(t),...,xm(t)]
t
为接收信号向量,f=[f(θ1),...,f(θ2),...,f(θk)]
t
是阵列元素的辐射图矩阵,而f(θ)=[f(θ-φ1),f(θ-φ2),...,f(θ-φm)]
t
是单个元素的辐射图。当f(θ-φm)=1,则表示数组元素是全向元素。每个信号的复振幅矢量可表示为s(t)=[s1(t),s2(t)...,,sk(t)]
t
,n(t)=[n1(t),...,n2(t),...,nm(t)]
t
是白噪声矢量。阵列流形矩阵可表示为:
[0018]
a=[a(θ1),a(θ2),...,a(θk)]
ꢀꢀꢀꢀꢀꢀꢀ
(2)其中是第i个信号的指向矢量,λ是信号的波长。
[0019]
与一般的圆形阵列不同,桶形天线阵列由金属圆柱体组成,这也是会产生“阴影效应”的原因。也就是说,只有桶形天线的一部分阵元可以接收到沿特定方向入射的信号。以一个16个阵子元素的天线阵列为例,当信号从θ=π/2入射到该数组时,只有阵列元素中的
1-9可以接收信号。而此时该信号的控制矩阵a(π/2)可以表示为[1,e
j2π/λcos(π/2-π/8)
,e
j2π/λcos(π/2-π/4)
,...,e
j2π/λcos(π/2-π)
,0,...0]
t
,其中“0”表示天线阵列中被遮盖的阵子元素,这将导致算法的性能急剧下降。
[0020]
为了消除由金属桶形体的“阴影效应”引起的不完整信号导向向量,需要一种将整个阵列元素划分为几个子阵列的方法。划分原理是,对于入射信号,应确保至少一个子阵列的所有元素都可以接收信号。对于桶形天线阵列,应确保每个子阵列≤π/2的跨度。
[0021]
根据上文所述,假设使用16个阵子元素的天线阵列。根据划分子阵列的规则,该天线阵列可划分为8个子阵列[51-53]:数组元素1-5是第一个子阵列,数组元素3-7是第二个子阵列,依此类推。通过使用此方法,始终可以为任何一个方向的入射信号找到一个子阵列,并且子阵列的所有元素都可以接收该信号。因此,子阵列上信号的导向向量是“完整的”。具体步骤如下,
[0022]
(1)通过公式(1)来获取整个阵列的数据向量;
[0023]
x(t)=[x1(t),x2(t),...,xm(t)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0024]
(2)从第一步xc(t)=[x
c1
(t),x
c2
(t),...,x
cs
(t)]
t
中提取每个子数组的数据向量,其中c表示第c个子数组,s表示子数组中的数组元素的个数;
[0025]
(3)使用music算法构造第c个子数组的空间频谱计算公式:
[0026][0027]
其中ac(θ)表示第c个子数组上信号的导引向量。uc是s
×
(s-ps)维矩阵,其列向量由子阵列的噪声子空间的特征向量组成。ps(ps<s)是入射在子阵列c上的信号数,θc是第c个子阵列的搜索范围。
[0028]
根据上述论证,本发明通过系列实验选取的部分参数,并综合考虑经济效益,最终选取一个3
×
8的桶形天线阵列,半径为r=0.6λ,高度h=2λ。此外,相邻阵列元素之间的距离被定义为大约0.5λ,且snr=-25。根据子阵列划分的三步原理,每三列都将9个阵列元素划分为一个子阵列,并将整个天线阵列划分为8个子阵列。从对称性来看,每层中的8个数组元素具有相同的φ角度,且每列中的三个阵子元素具有不同的θ角度,但顶部和底部阵子元素是对称的。假设一个源信号从(θ,φ)=(60,50)方向入射到天线阵列上,snr为-25db,样本数为100。根据计算公式(4)在空间频谱上,可以得到doa估计算法的仿真结果如附图2所示。根据频谱的波峰值,可以准确估算桶形天线的俯仰角θ和水平角φ。
[0029]
2.巡检无人机下一时刻状态信息的精准预测
[0030]
为了提高预测模型的准确率和训练效率,本发明对获取的原始数据进行一系列复杂的数据预处理,数据预处理的具体过程如附图3所示。
[0031]
其中,本发明研究的无人机角度为俯仰角θ和水平角φ,如果分别将两个一维到达角输入到预测模型中,训练过程会过于复杂且训练时间周期过长,甚至会导致不准确的预测结果。因此,本发明对获取的数据进行数据整合来简化模型的训练过程。为了解决这个问题,本发明提出了一种基于网格的坐标系,基于网格的数据整合方法的详细步骤如下:
[0032]
1)假设在某一时刻,无人机的俯仰角是x轴上的一个点,水平角是y轴上的一个点。为了避免数据整合影响数据的整体精度,本文将坐标系的单位长度设置为0.5。基于以上规律,本文建立了一个基于网格的数据整合坐标系,如附图4所示。
[0033]
2)根据上述步骤建立的数据整合坐标系,可将特定时刻的任何一个点都看成一组
无人机的二维坐标,我们假设坐标系中的一点坐标为(θ,φ);
[0034]
3)当对应点的坐标不在单位长度坐标轴上时,我们对角度数据进行四舍五入。在本文的通信场景中,经过多次实验发现,俯仰角的范围通常为10到15度,水平角的范围为-180到180度。例如,我们可以映射80到85度的角度数据,具体情况如图所示。提高预测模型的学习效率,蓝色区域中的所有点(例如(θ1,φ1)),在网格坐标系中都会被视为红色点(θ
′
,φ
′
);
[0035]
4)最后,将(θ
′
,φ
′
)根据函数表达式,转换为唯一值z,从而实现数据的整合,最后将z用作训练模型样本的标签,函数表达式如下:
[0036]
z=f(θ
′
,φ
′
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0037]
根据上述的网格坐标系,本发明将两个一维到达角整合成了一个二维到达角,从而有效提高了训练效率和rnn预测模型的准确性。
[0038]
针对数据预处理的过程,将处理后的角度数据输入到rnn预测模型中,进行训练,并设定特定的时间步长来提高模型的记忆能力,从而在一定程度上提高预测模型的准确性。最后,角度数据将保存到本地磁盘以备将来使用。
[0039]
3.无人机异常行为的实时监测
[0040]
当无人机在变电站中巡检时,受到强电磁干扰会偏离预设巡检轨迹,表现出异常行为,具体情况如附图5所示,假设由a到b是无人机巡检的正常行为模型,当受到强电磁干扰时,则会偏离到异常位置“c”。根据训练好的正常行为模型,可以根据正常行为模型的异常位置``c
″
和位置点``b
″
之间的nrmse来监测无人机的异常行为。当nrmse大于选定的阈值时(通过实验),可以将该行为检测为异常,当nrmse小于所选阈值时,该行为将被视为正常行为。且nrmse的具体计算过程如下:
[0041]
1)完成角度数据的归一化计算:
[0042][0043]
其中x代表所有角度数据样本,x.min和x.max代表每一列的最大值和最小值,由于标准化的最大值为1,最小值为0,因此max=1,min=0。
[0044]
2)完成rmse的计算:
[0045][0046]
其中m是角度数据中列数的总个数,因此在本发明中m=2(俯仰角和水平角),是训练的正常行为模型中获取的数据。通过比较无人机正常行为模型提供的巡检无人机位置信息和无人机实际位置信息之间的nrmse和选取阈值之间的关系,实现无人机的异常行为监测。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。