1.本发明涉及多关节等速训练装置技术领域,具体涉及一种多关节等速训练控制方法及系统。
背景技术:
2.等速运动是指在关节运动过程中运动速度恒定而阻力可变,在运动过程中,肌肉用力仅使肌肉力量增加、力矩输出增加,而不改变运动过程中角速度的大小,即运动速度恒定。等速运动是在关节活动的整个范围内,肌肉都能承受最大负荷的一种运动模式,最初主要用于肌肉功能评价和运动损伤后的肌力训练,近年来,随着研究的不断展开,该技术逐渐应用于康复医学领域。
3.现有的关节训练的主要方式是由肌肉收缩引起的肢体围绕其关节某一轴进行角速度不变的旋转,肌纤维长度缩短或被拉伸,引起明显的关节活动,是一种动力性收缩,类似于等张收缩。而在等速运动中,等速仪器所提供的是一种顺应性阻力,阻力大小随肌肉收缩张力的大小而变化,类似等长收缩。因此,等速运动更适用于康复或测试时的恢复和加强肌肉力量。
4.在等速训练的过程中,需要将用户的肢体固定在转动臂上,跟随转动臂可以做等速的摆动,通常情况下,用户的肢体摆动至不同的位置处时,对转动臂的作用力的大小和方向是不同的,即用户的肢体对转动臂的作用力为动态力,因此,为了保证转动臂可以持续并精准的等速摆动,就需要根据用户肢体对转动臂的动态力实时的调整驱动组件的扭矩;现有的多关节等速训练控制设备均需要配置扭矩传感器来检测驱动组件的输出扭矩,这会限制多关节等速训练控制设备的结构和设计空间,增大了多关节等速训练控制设备的体积和复杂度;同时,现有的多关节等速训练控制设备对于变化的动态力难以精准的调整驱动组件的扭矩,会使得转动臂的摆动难以精准的等速运动,给用户的康复训练带来困难。
技术实现要素:
5.对于现有技术中所存在的问题,本发明提供的一种多关节等速训练控制方法及系统,可以实时的计算并调整驱动组件的输出扭矩,从而可以精准的控制转动臂的转动角度、速度及扭矩,保证转动臂可以带动用户的关节等速运动,保证用户的康复训练效果。
6.为了实现上述目的,本发明采用的技术方案如下:
7.一方面,本发明提供了一种多关节等速训练控制方法及系统,包括以下步骤:
8.s1:获取转动臂的目标转速;
9.s2:在t0时刻,获取转动臂的第一转动角度,获取驱动组件对转动臂的第一输出扭矩,获取转动臂的第一实时转速;
10.s3:根据所述第一实时转速和所述第一转动角度,计算在t1时刻时,所述转动臂的第二转动角度;
11.s4:根据所述第一实时转速、所述第一转动角度和所述第一输出扭矩,计算在t1时
刻时,驱动组件对转动臂的第二输出扭矩和所述转动臂的第二实时转速;
12.s5:在t1时刻时,驱动组件以第二输出扭矩驱动所述转动臂以所述第二实时转速转动;
13.s5:令t1=t0,并重复步骤s2-s5。
14.作为一种优选的技术方案,在步骤s2中,通过角度传感器获取所述转动臂的所述第一转动角度;通过扭矩传感器获取所述驱动组件对所述转动臂施加的所述第一输出扭矩;通过转速传感器获取所述转动臂的所述第一实时转速。
15.作为一种优选的技术方案,在步骤s3中,所述第二转动角度的计算公式为:
16.θ1=θ0 v(t
1-t0);
17.其中,θ1为第二转动角度,θ0为第一转动角度,v为第一实时转速。
18.作为一种优选的技术方案,在步骤s4中,所述第二输出扭矩和所述第二实时转速均采用pid算法计算,所述pid算法的计算公式为:
[0019][0020]
其中:k
p
为比例系数,e(k)为用户设定值与当前状态值得差;ki为积分系数,为误差的累加;kd为微分系数,e(k) e(k-1)当前误差与上次误差的差。
[0021]
作为一种优选的技术方案,在步骤s2中,通过第一输出扭矩可以计算外力矩,所述外力矩的计算公式如下:
[0022]
t
外
=t
传-mgl
·
sinθ
[0023]
其中:t
传
为扭矩传感器获取的系统整体扭矩,mg为转动臂自身重力,l为转动臂质心距离旋转中心的等效杆长,θ为转动臂的角。
[0024]
作为一种优选的技术方案,在步骤s1中,还需要获取转动臂的限位角度。
[0025]
作为一种优选的技术方案,在所述转动臂的所述第二实时转速与所述目标转速不同时,所述驱动组件输出的所述第二输出扭矩和所述转动臂的所述第二实时转速均通过所述pid算法计算。
[0026]
第二方面,本发明提供了一种多关节等速训练控制系统,用于实现权利要求前述的一种多关节等速训练控制方法,包括:
[0027]
角度获取模块,用于获取转动臂的摆动角度;
[0028]
输出扭矩获取模块,用于获取驱动组件的输出扭矩;
[0029]
转速获取模块,用于获取转动臂的转速;
[0030]
控制器,用于根据第一实时转速和第一转动角度计算第二转动角度、用于根据第一实时转速、第一转动角度和第一输出扭矩计算第二输出扭矩和第二实时转速、用于控制驱动组件输出第二输出扭矩。
[0031]
作为一种优选的技术方案,所述控制器还包括计时模块。
[0032]
作为一种优选的技术方案,所述角度获取模块设为角度传感器;所述输出扭矩获取模块设为扭矩传感器;所述转速获取模块设为转速传感器。
[0033]
本发明的有益效果表现在:
[0034]
本发明可以实时的计算并调整驱动组件的输出扭矩,从而可以精准的控制转动臂
的转动角度、速度及扭矩,保证转动臂可以带动用户的关节等速运动,保证用户的康复训练效果。
附图说明
[0035]
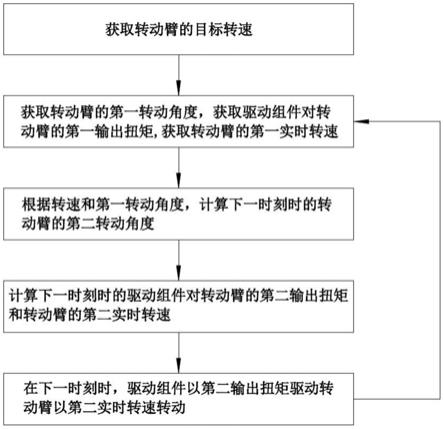
图1为本发明一种多关节等速训练控制方法的一种流程图;
[0036]
图2为本发明一种多关节等速训练控制系统的一种结构图。
具体实施方式
[0037]
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
[0038]
请参照图1,为本发明一种多关节等速训练控制方法的一种实施例,包括以下步骤:
[0039]
s1:获取转动臂的目标转速;
[0040]
s2:在t0时刻,获取转动臂的第一转动角度,获取驱动组件对转动臂的第一输出扭矩,获取转动臂的第一实时转速;
[0041]
s3:根据第一实时转速和第一转动角度,计算在t1时刻时,转动臂的第二转动角度;
[0042]
s4:根据第一实时转速、第一转动角度和第一输出扭矩,计算在t1时刻时,驱动组件对转动臂的第二输出扭矩和转动臂的第二实时转速;
[0043]
s5:在t1时刻时,驱动组件以第二输出扭矩驱动转动臂以第二实时转速转动;
[0044]
s5:令t1=t0,并重复步骤s2-s5。
[0045]
需要说明的,在步骤s2中,通过角度传感器获取转动臂的第一转动角度;通过扭矩传感器获取驱动组件对转动臂施加的第一输出扭矩;通过转速传感器获取转动臂的第一实时转速。
[0046]
需要说明的,在步骤s3中,第二转动角度的计算公式为:
[0047]
θ1=θ0 v(t
1-t0);
[0048]
其中,θ1为第二转动角度,θ0为第一转动角度,v为第一实时转速。
[0049]
需要说明的,在步骤s4中,第二输出扭矩和第二实时转速均采用pid算法计算,pid算法的计算公式为:
[0050][0051]
其中:k
p
为比例系数,e(k)为用户设定值与当前状态值得差;ki为积分系数,为误差的累加;kd为微分系数,e(k) e(k-1)当前误差与上次误差的差。
[0052]
需要说明的,在步骤s2中,通过第一输出扭矩可以计算外力矩,外力矩的计算公式如下:
[0053]
t
外
=t
传-mgl
·
sinθ
[0054]
其中:t
传
为扭矩传感器获取的系统整体扭矩,mg为转动臂自身重力,l为转动臂质心距离旋转中心的等效杆长,θ为转动臂的角。
[0055]
需要说明的,在步骤s1中,还需要获取转动臂的限位角度,限位角度为转动臂转动
的最大角度,当转动臂转动的转动角度到达限位角度时,转动臂反向转动。
[0056]
需要说明的,在转动臂的第二实时转速与目标转速不同时,驱动组件输出的第二输出扭矩和转动臂的第二实时转速均通过pid算法计算。
[0057]
请参照图2,本发明提供了一种多关节等速训练控制系统,用于实现权利要求前述的一种多关节等速训练控制方法,其特征是,包括:
[0058]
角度获取模块,用于获取转动臂的摆动角度;
[0059]
输出扭矩获取模块,用于获取驱动组件的输出扭矩;
[0060]
转速获取模块,用于获取转动臂的转速;
[0061]
控制器,用于根据第一实时转速和第一转动角度计算第二转动角度、用于根据第一实时转速、第一转动角度和第一输出扭矩计算第二输出扭矩和第二实时转速、用于控制驱动组件输出第二输出扭矩。
[0062]
需要说明的,控制器还包括计时模块。
[0063]
需要说明的,角度获取模块设为角度传感器;输出扭矩获取模块设为扭矩传感器;转速获取模块设为转速传感器。
[0064]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。