旋转角检测装置
1.相关申请的交叉引用
2.本技术主张基于在2019年10月15日申请的申请号2019-188329的日本专利申请的优先权,通过参照将其全部的公开内容引用到本技术。
技术领域
3.本公开涉及旋转角检测装置。
背景技术:
4.作为增量型的旋转角检测装置的码盘,例如较多地利用具有遍及周向的整周设置的旋转角检测用的刻度尺和设置在周向的一处基准位置的基准角度检测用的刻度尺的码盘(例如,日本特开平7-43134号公报)。
5.关于具有旋转角检测用以及基准角度检测用的两种刻度尺的码盘,由于需要高精度地形成基准角度检测用的刻度尺,所以与仅具有旋转角度检测用的刻度尺的码盘相比,难以形成,大型且高成本。另外,由于利用该码盘的旋转角检测装置用的传感器需要具备旋转角检测用的电路和基准角度检测用的电路双方,所以与利用仅具有旋转角度检测用的刻度尺的码盘的旋转角检测装置用的传感器相比,大型且高成本。因此,希望能够以更小型且低成本的结构检测旋转角以及基准角度的技术。
技术实现要素:
6.根据本公开的一个方式,提供一种检测对象物的旋转角的旋转角检测装置。该旋转角检测装置具备:增量型的旋转刻度尺,与上述对象物一体地旋转,在沿着旋转的周向的区域具有被检测区域和非被检测区域,上述被检测区域形成有用于检测上述旋转角的刻度尺,上述非被检测区域夹着上述被检测区域且不形成有上述刻度尺;以及检测部,至少根据与上述被检测区域的上述刻度尺的位置的位移相应的输入信号,得到与上述被检测区域的上述刻度尺的位置的位移对应地周期性地变化的电信号,上述被检测区域的上述刻度尺的位置根据上述旋转角的位移而变化。
7.该方式的旋转角检测装置通过将对象物的旋转角限定在小于一圈的角度范围,从而能够使用在与所限定的角度范围对应的被检测区域形成有刻度尺的旋转刻度尺、即省略了基准角度检测用的刻度尺的旋转刻度尺。另外,能够使用检测部,该检测部根据与被检测区域的刻度尺的位置的位移相应的输入信号,生成与被检测区域的刻度尺的位置的位移对应地周期性地变化的电信号,上述被检测区域的刻度尺的位置根据对象物的旋转角的位移而变化。在该情况下,即使没有基准角度检测用的刻度尺,也可以以被检测区域与非被检测区域的边界位置为基准,根据与被检测区域的刻度尺的位置的位移对应地变化的电信号的周期性变化的数量来检测基准角度。由此,能够以小型且低成本的结构来检测旋转角以及基准角度。
附图说明
8.通过参照附图进行下述的详细的描述,有关本公开的上述目的以及其他目的、特征、优点变得更加明确。
9.图1是表示具备第一实施方式的旋转角检测装置的物体检测装置的一个例子的说明图。
10.图2是表示旋转角检测装置的结构的说明图。
11.图3是表示旋转角检测装置的检测信号的一个例子的说明图。
12.图4是表示旋转角检测动作的自诊断处理的一个例子的说明图。
13.图5是表示旋转角检测动作的自诊断处理的另一个例子的说明图。
14.图6是表示第二实施方式的旋转刻度尺的结构的说明图。
15.图7是表示第二实施方式的旋转刻度尺的另一结构的说明图。
16.图8是表示第三实施方式的旋转角检测装置的旋转刻度尺的结构的说明图。
17.图9是表示第四实施方式的旋转角检测装置的旋转刻度尺的结构的说明图。
18.图10是表示第五实施方式的旋转角检测装置的结构的说明图。
19.图11是表示第六实施方式的旋转角检测装置的结构的说明图。
具体实施方式
20.a.第一实施方式:
21.如图1所示,作为一个例子,第一实施方式的旋转角检测装置搭载于物体检测装置100来使用。物体检测装置100例如是lidar(light detection and ranging:光探测和测距),具备控制部10、发光部22、旋转体24、受光部26、致动器30、致动器驱动部32以及旋转角检测部50。
22.控制部10是具备运算部、存储部以及输入输出部的微处理器、fpga、asic、soc等,通过使储存于存储部的各种程序在存储部中展开并执行,根据由旋转角检测部50检测出的旋转角,来控制致动器30的动作。此外,致动器30被用作与旋转轴40一体地旋转的旋转体24的驱动单元,由于通过旋转体24的旋转来检测物体的检测方位,所以以下,将旋转角也称为方位角。控制部10进一步控制从发光部22输出的照射光的发光定时,使用到照射光经由旋转体24照射到物体并作为反射光被受光部26接受为止的时间来计算距进行反射的物体的距离。控制部10通过信号线与发光部22、受光部26、致动器驱动部32以及旋转角检测部50连接,接收从受光部26以及旋转角检测部50输出的信号,对发光部22以及致动器驱动部32发送控制信号。
23.致动器30在旋转轴40的端部具备旋转体24,旋转驱动旋转体24。致动器30通过由接受到来自控制部10的驱动控制信号的致动器驱动部32进行的电流控制,来控制旋转轴40的旋转。作为致动器30,能够使用可瞬时切换旋转方向的利用磁的致动器、例如旋转螺线管。但是,并不限定于此,也可以使用以无刷马达为代表的各种电动机。
24.物体检测部包括发光部22、受光部26以及旋转体24。发光部22例如具备激光二极管作为光源,照射红外激光。发光部22具备未图示的光源驱动器,利用与从控制部10输入的发光控制信号相应的发光模式来驱动激光二极管,照射激光。构成发光部22的光源可以是一个,也可以是多个。
25.受光部26例如具备一个或者多个光电二极管作为受光元件或者受光元件阵列。受光部26将与输入至各受光元件的入射光量相应的电流转换为电压并作为受光信号或者作为数字数据输出至控制部10。
26.旋转体24例如具备单面镜,通过沿着旋转轴40配置发光部22以及受光部26,从发光部22照射的激光经由镜照射,以例如以遍及水平方向的一定的角度范围的方位角扫描物体。被物体反射的激光通过与照射光相同的光路径,经由镜入射至受光部26。其结果是,能够遍及一定的角度范围θar的方位角,进行用于检测物体的扫描。另外,旋转体24也可以不具备镜,而具备配置成阵列状的多个发光部22和受光部26,且具备直接对外界照射激光,并直接接受反射光的结构。此外,将作为物体检测装置100的扫描范围、扫描旋转角、即由物体检测部执行的伴随着激光的照射的扫描执行范围设定为小于一圈、即小于360
°
的预先规定的角度范围θar即可。
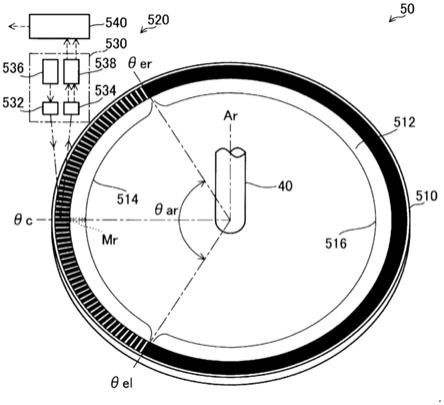
27.旋转角检测部50是检测与旋转轴40连接的旋转体24的旋转角的增量型的旋转角检测装置。以下,将旋转角检测部50也称为“旋转角检测装置50”。如图2所示,旋转角检测装置50具备旋转刻度尺510和检测部520。检测部520具备旋转角传感器530和检测处理部540,该检测处理部540根据从旋转角传感器530输出的a相和b相这2相检测信号来检测旋转体24的旋转角。
28.旋转刻度尺510在作为垂直于中心轴ar的平面的圆盘面512上的外周边侧的圆环状区域,具备对应于左端部角度θel~右端部角度θer的角度范围θar的被检测区域514和对应于角度范围θar外的角度范围且除去被检测区域514的非被检测区域516。在被检测区域514,沿着周向形成有用于检测旋转角θr的刻度尺。被检测区域514的刻度尺是交替地形成有反射照射光的反射部(用“白色”表示的位置)和不反射照射光的非反射部(用“黑色”表示的位置)的刻度。非被检测区域516遍及周向的整个区域形成有非反射部或者反射部。此外,在本实施方式中,非被检测区域516形成有非反射部。旋转刻度尺510省略了基准角度检测用的刻度尺(图中用虚线表示)。旋转刻度尺510是增量型的旋转刻度尺。
29.旋转刻度尺510以旋转轴40的中心轴与旋转刻度尺510的中心轴ar一致且与旋转轴40一体地旋转的方式连接于旋转轴40。另外,旋转刻度尺510以被检测区域514与旋转体24的旋转的角度范围一致的方式连接于旋转轴40。
30.旋转角传感器530具备发光部532、受光部534、驱动发光部532的发光驱动部536、以及将作为从受光部534输出的电信号的受光信号转换为检测信号的转换处理部538。
31.发光部532例如具备发光二极管(led;light emitting diode)作为光源,通过从发光驱动部536施加预先设定的电压,对旋转刻度尺510照射与施加电压对应的光量的光。此外,构成发光部22的发光二极管可以是一个,也可以是多个。
32.受光部534例如具备一对或者多对光电二极管作为a相以及b相的受光元件或者受光元件阵列。受光部534将根据对旋转刻度尺510照射的光被被检测区域514反射而入射至各受光元件的光信号的光量而产生的电流转换为电压,并作为受光信号输出至转换处理部538。因此,作为入射至受光部534的输入信号的光信号是其光量根据被检测区域514的刻度尺的位置周期性地变化的信号。而且,受光部534根据光信号的周期性变化输出a相以及b相的受光信号。
33.如图3所示,转换处理部538将从受光部534输出的a相以及b相的受光信号转换为a
相以及b相的脉冲状的检测信号并输出。此外,a相以及b相的受光元件或者受光元件阵列配置为b相的检测信号成为相对于a相的检测信号的周期t偏移了1/4周期的信号。如图3所示,在旋转方向为正转方向(例如,在图2中也称为“顺时针方向”、“右旋转方向”)的情况下,b相的检测信号成为相对于a相的检测信号延迟了1/4周期的信号。另外,如图3所示,在旋转方向为反转方向(例如,在图2中也称为“逆时针方向”、“左旋转方向”)的情况下,b相的检测信号成为相对于a相的检测信号提前了1/4周期的信号。此外,检测信号并不限定于脉冲状的周期信号,也可以是正弦波状的周期信号、三角波状的周期信号。
34.检测处理部540能够根据a相的检测信号与b相的检测信号的相位关系来检测旋转方向。另外,角度范围θar的被检测区域514的刻度的数量、以及左端部角度θel或者右端部角度θer与中间的基准角度θc之间的被检测区域514的刻度的数量是预先设定的已知的数量。因此,检测处理部540能够通过对由于旋转角θr在被检测区域514的左端部角度θel的位置与右端部角度θer的位置之间位移而产生的a相以及b相的检测信号中的脉冲的数量进行计数,来检测当前的旋转角θr。另外,基准角度θc的位置能够通过对由于旋转角θr从左端部角度θel或者右端部角度θer位移而产生的a相以及b相的检测信号中的脉冲的数量进行计数,检测成为与基准角度θc对应的数量的旋转角θr的位置来检测。
35.如以上说明的那样,旋转角检测装置50能够使用省略了基准角度检测用的刻度尺的结构的旋转刻度尺510,来检测角度范围θar中的旋转角θr的位置,并且能够检测基准角度θc的位置,并能够检测以基准角度θc为基准的旋转角θr的位置。由此,能够以小型且低成本的结构的旋转来检测旋转角以及基准角度。
36.另外,如图4所示,检测处理部540能够对在交替地切换旋转体24(参照图1)的旋转方向来进行扫描的处理中执行的旋转角检测装置50的旋转角检测动作是否正常进行自诊断。
37.在直到在规定时间ts的期间没有产生脉冲为止的期间(步骤s130:否)),控制部10(参照图1)通过致动器驱动部32驱动致动器30从而反复进行右旋转方向扫描(步骤s110)。此时,检测处理部540能够通过对从旋转角传感器530输出的检测信号的脉冲的数量进行计数,来检测右旋转时的旋转角θr。此外,规定时间ts被设定为可以判断为到达被检测区域514(参照图2)的端部、即右端部角度θer的右端部或者左端部角度θel的左端部的时间。
38.在这里,在反复进行右旋转方向扫描(步骤s110)的期间,检测处理部540判断计数数量tc是否为规定值n以下(步骤s120),在tc>n的情况下(步骤s120:否),向控制部10报告计数数量tc过多的误检测的警告(步骤s124)。规定值n是相当于形成在被检测区域514的已知的刻度的数量的脉冲数量。
39.在规定时间ts的期间没有产生脉冲的情况下(步骤s130:是),检测处理部540判断为旋转角θr成为右端部角度θer,旋转体24的旋转的位置到达右端部(步骤s140)。此时,控制部10基于检测处理部540的判断,将扫描方向切换为左旋转方向。
40.然后,在直到在规定时间ts的期间没有产生脉冲为止的期间(步骤s170:否),控制部10通过致动器驱动部32驱动致动器30从而反复进行左旋转方向扫描(步骤s150)。此时,检测处理部540能够通过对从旋转角传感器530输出的检测信号的脉冲的数量进行计数,来检测左旋转时的旋转角θr。
41.在这里,在反复进行左旋转方向扫描(步骤s150)的期间,检测处理部540判断计数
数量tc是否为规定值n以下(步骤s160),在tc>n的情况下(步骤s160:否),向控制部10报告计数数量tc过多的误检测的警告(步骤s164)。
42.在规定时间ts的期间没有产生脉冲的情况下(步骤s170:是),检测处理部540判断为旋转角θr为左端部角度θel,旋转体24的旋转的位置到达左右端部(步骤s180)。
43.然后,检测处理部540判断计数数量tc是否等于规定值n(步骤s190)。在tc<n的情况下(步骤s190:否),检测处理部540向控制部10报告计数数量tc过少的误检测的警告(步骤s194),在tc=n的情况下(步骤s190:是),检测处理部540向控制部10报告旋转角检测动作正常(步骤s200)。
44.然后,控制部10基于步骤s180中的检测处理部540的判断,在将扫描方向切换为右旋转方向后,反复进行右旋转方向扫描(步骤s110)。
45.根据图4所示的旋转角检测动作中的自诊断处理,能够在从一个端部到另一个端部的角度范围内扫描旋转体24的情况下检测的脉冲的数量与已知的数量不一致时,对控制部10报告旋转角度的检测动作为误检测的警告。而且,在控制部10中,能够基于从旋转角检测部50即旋转角检测装置50接受到的误检测的警告,来判断旋转角检测装置50的动作的正常/异常。例如,关于如误检测警告仅为一次的情况那样,由噪声引起的误检测的可能性较高,存在恢复到正常的检测动作的可能性的误检测,能够不停止物体检测装置100的动作。而且,在如发生了多次相同种类(计数数量较少、或者计数数量较多)的误检测的警告的情况那样,在旋转刻度尺510等附着灰尘、水滴等而因物理上的不良情况产生误检测,且无法恢复到正常的检测动作的可能性较高的情况下,能够判断为旋转角检测装置50的故障,使物体检测装置100的动作停止。
46.在图4所示的处理中,设为旋转角检测装置50只进行到误检测的警告的报告,故障的判断由上位的控制部10来执行的情况进行了说明。然而,并不限定于此,也可以如图5所示的处理那样,在旋转角检测装置50中执行到故障的判断。
47.图5的处理在图4的步骤s124的前后追加步骤s122、s126、s128的处理,在图4的步骤s164的前后追加步骤s162、s166、s168的处理,在图4的步骤s194的前后追加步骤s192、s196、s198的处理以及步骤s210、s220的处理。以下,添加所追加的处理的说明。
48.在步骤s122中,检测处理部540判断tc>n的误检测次数ex是否为规定次数m以下。然后,在ex≤m的情况下(步骤s122:是),检测处理部540向控制部10报告计数数量tc过多的误检测的警告(步骤s124),在作为报告的响应而从控制部10发出停止指示的情况下(步骤s126:是),停止旋转角检测动作(步骤s128)。与此相对,在ex>m的情况下,检测处理部540判断为旋转角检测装置50故障并向控制部10报告故障(步骤s196),并停止旋转角检测装置50的动作(步骤s198)。接受到故障的报告的控制部10停止旋转体24的旋转动作。
49.步骤s162、s166、s168与步骤s122、s126、s128相同,而省略说明。
50.在步骤s192中,检测处理部540判断tc<n的误检测次数es是否为规定次数p以下。此外,p既可以p≤m也可以p≥m。而且,在es≤p的情况下(步骤s192:是),检测处理部540向控制部10报告计数数量tc过少的误检测的警告(步骤s194),在作为报告的响应而从控制部10发出停止指示的情况下(步骤s196:是),停止旋转角检测动作(步骤s198)。与此相对,在es>p的情况下(步骤s192:否),检测处理部540判断为旋转角检测装置50的故障并向控制部10报告故障(步骤s210),并停止旋转角检测装置50的动作(步骤s220)。
51.在图5所示的处理中,旋转角检测装置50在产生了多次相同种类(计数数量较少、或者计数数量较多)的误检测警告的情况下,能够判断为旋转角检测装置50的故障,并向控制部10报告故障。
52.此外,也可以为旋转角检测装置50的检测部520所包含的检测处理部540包含于控制部10的结构。
53.b.第二实施方式:
54.在第一实施方式中,设为旋转角检测装置50的发光部532(参照图2)通过从发光驱动部536施加预先设定的电压,来对旋转刻度尺510的被检测区域514照射与施加电压对应的光量的光的结构进行了说明。与此相对,发光驱动部536也可以以由受光部534实际接受的光量为预先设定的光量的范围内的方式控制施加电压,来自动地控制发光部22的发光。该发光光量的自动控制也被称为apc(automatic power control:自动功率控制)。此外,apc不仅是发光光量的自动控制,也可以是自动地控制受光部的受光灵敏度(所谓的增益)的方法。
55.在通过apc来控制发光光量的情况下,在使用如旋转刻度尺510(参照图2)那样遍及非被检测区域516的整个区域形成有非反射部或者反射部的旋转刻度尺的情况下,存在旋转角检测动作不稳定的可能性。例如,在非被检测区域516由非反射部形成的情况下,在旋转体24的旋转角的位置处于角度范围θar的任意一个端部的状态下,由于检测出的发光光量在a相以及b相中相等且被维持在较小的状态,所以通过apc进行控制,以使得发光光量增大。此时,在通过apc进行了发光光量的增大控制后,在根据旋转体24的旋转执行了由旋转角检测装置50进行的旋转角检测的情况下,受光部534接受的光量成为饱和的状态,而存在在基于反射和非反射的光量的变化的检测动作中产生不良情况的可能性。另外,在非被检测区域516由反射部形成的情况下,在旋转体24的旋转角的位置处于角度范围θar的任意一个端部的状态下,所检测的发光光量维持在较大的状态,所以通过apc进行控制,以使得发光光量变小。此时,在通过apc进行了发光光量的抑制控制后,在根据旋转体24的旋转执行了由旋转角检测装置50进行的旋转角检测的情况下,受光部534接收的光量不足,而存在在基于反射和非反射的光量的变化的检测动作中产生不良情况的可能性。
56.因此,在执行apc的结构的情况下,利用图6所示的旋转刻度尺510a即可。该旋转刻度尺510a将图2的旋转刻度尺510的非被检测区域516置换为非被检测区域516a。非被检测区域516a由内周侧的非反射部516nr和外周侧的反射部516r形成。非反射部516nr和反射部516r将径向的宽度设定为每单位角度的面积相等,以使得在没有apc的状态下,由受光部534接收的照射至非被检测区域516a的端部的光的反射光的光量为被检测区域514的反射部与非反射部中的光量之差的1/2,并且在a相和b相中相等。此外,非被检测区域516a也可以由内周侧的反射部516r和外周侧的非反射部516nr形成。
57.若是上述结构的非被检测区域516a,则即使进行apc,也能够抑制由于apc而发生受光部534的受光光量的饱和或不足,而在基于反射和非反射的光量的变化的检测动作中产生不良情况的可能性。
58.此外,应对apc的非被检测区域的结构并不限定于图6所示的旋转刻度尺510a的非被检测区域516a的结构,例如,也可以如图7所示的旋转刻度尺510b的非被检测区域516b那样,由反射被检测区域514的反射部和非反射部中的光量之差的1/2的光的中间反射部来形
成。即,为照射至非被检测区域的端部的光的反射光的光量为被检测区域中的光量的最大值与最小值之差的1/2,并且在a相和b相中相等的结构即可。此外,“在a相和b相中相等”并不限定于“完全一致”,例如,包含即使作为“相等”来处理在动作上也没有问题的程度的差。同样地,“最大值与最小值之差的1/2”也并不限定于“1/2”,例如,包含即使作为“1/2”来处理在动作上也没有问题的程度的误差。
59.c.第三实施方式:
60.第一实施方式的旋转刻度尺510(参照图2)在作为垂直于中心轴ar的平面的圆盘面512上形成有被检测区域514以及非被检测区域516。与此相对,也可以利用如图8所示的旋转刻度尺510c那样,在作为沿着中心轴ar的周向的曲面的侧面518上形成有被检测区域514c以及非被检测区域516c的旋转刻度尺。即使利用该旋转刻度尺510c也能够得到与第一实施方式相同的效果。
61.此外,虽然省略图示,但也可以使非被检测区域516c为与第二实施方式的旋转刻度尺510a、510b同样的结构。
62.d.第四实施方式:
63.以第一实施方式的旋转刻度尺510(参照图2)具备一个被检测区域514的结构为例,但如图9所示,也可以为具备多个(在本例中为两个)被检测区域514_1、514_2的旋转刻度尺510d。此外,多个被检测区域的各自的角度范围可以相同也可以不同。
64.在该结构中,也能够得到与第一实施方式相同的效果。另外,在该结构中,能够作为不仅如第一实施方式那样,检测在一定的角度范围内往复转动的对象物的旋转角(也称为“转动角”),也检测旋转的对象物的旋转角的旋转角检测装置来应用。此外,在这种情况下,在非被检测区域中,通过根据在被检测区域中得到的角度信息的推断来控制致动器的动作即可。
65.此外,对于旋转刻度尺510d,以将旋转刻度尺510的被检测区域514(参照图2)设为多个被检测区域514_1、514_2的结构为例进行了说明,但也可以将第二实施方式的旋转刻度尺510a、510b的被检测区域、第三实施方式的旋转刻度尺510c的被检测区域514设为多个被检测区域。
66.e.第五实施方式:
67.以第一实施方式的旋转刻度尺510(参照图2)为光反射方式的旋转刻度尺为例进行了说明,但也能够应用于透光方式的旋转刻度尺。
68.如图10所示,第五实施方式的旋转角检测装置50e具备旋转刻度尺510e和检测部520e。
69.旋转刻度尺510e是透光方式的旋转刻度尺,具备形成有刻度尺的被检测区域514e和夹着被检测区域514e且不形成有刻度尺的非被检测区域516e。被检测区域514e的刻度尺由交替地形成有透过照射光的透过部(用“白色”表示的位置)和不透过照射光的非透过部(用“黑色”表示的位置)的刻度来形成。非被检测区域516e遍及周向的整个区域形成有非透过部或者透过部。此外,在本实施方式中,非被检测区域516e形成有非透过部。
70.检测部520e具备旋转角传感器530e来代替旋转角传感器530(参照图2)。旋转角传感器530e夹着旋转刻度尺510e配置有发光部532和受光部534,以使得受光部534接受从发光部532向旋转刻度尺510e照射的光中的透过透过部的光。
71.在该结构中,也能够得到与第一实施方式相同的效果。
72.此外,设为旋转刻度尺510e的非被检测区域516e遍及整个区域形成有非透过部或者透过部来进行了说明,但也可以为在内周侧形成非透过部或者透过部,在外周侧形成透过部或者非透过部的结构。若这样,能够抑制如在第二实施方式中说明的那样的因apc而产生的检测的不良情况。
73.f.第六实施方式:
74.第一实施方式的旋转刻度尺510(参照图2)以光反射方式的旋转刻度尺为例进行了说明,但也能够应用于磁方式的旋转刻度尺。
75.如图11所示,第六实施方式的旋转角检测装置50f具备旋转刻度尺510f和检测部520f。
76.旋转刻度尺510f具备形成有刻度尺的被检测区域514f和夹着被检测区域514f且不形成有刻度尺的非被检测区域516f。被检测区域514f的刻度尺由交替地形成有被磁化成n极的区域亦即n极部(用“白色”表示的位置)和被磁化成s极的区域亦即s极部(用“黑色”表示的位置)的刻度形成。非被检测区域516f遍及周向的整个区域形成有s极部或者n极部。此外,在本实施方式中,非被检测区域516f形成有s极部。
77.检测部520f具备旋转角传感器530f来代替旋转角传感器530(参照图2)。旋转角传感器530f具备磁传感器534f,以检测与旋转刻度尺510的位置相应的磁场的变化。
78.在该结构中,也能够得到与第一实施方式相同的效果。
79.此外,设为旋转刻度尺510f的非被检测区域510e遍及整个区域形成有s极部或者n极部来进行了说明,但也可以为形成未被磁化的无磁极部的结构。若这样,能够抑制如在第二实施方式中说明的那样的因apc而产生的检测的不良情况。
80.另外,也可以将第三实施方式的旋转刻度尺510c的被检测区域514c以及非被检测区域516c设为旋转刻度尺510f的被检测区域514f以及非被检测区域516f那样。
81.g.其他实施方式:
82.(1)以上述实施方式的旋转刻度尺510、510a、510b、510c的非被检测区域516、516b、516c遍及一周的区域中的除了与被检测区域对应的角度范围以外的角度范围的整个区域来形成的结构为例进行了说明,但也可以为仅在与被检测区域的边界的一部分区域形成非被检测区域的结构。
83.(2)以上述实施方式的旋转刻度尺510、510a、510b、510c为具有圆盘形状的外形的旋转刻度尺为例进行了说明,但并不限定于此,也可以是具有扇形状的外形的旋转刻度尺。即,只要被检测区域以及非被检测区域沿着旋转的周向来形成,则并不对旋转刻度尺的外形形状进行特别限定。
84.(3)在图4和图5的步骤s130、s160中,根据在规定时间ts的期间没有产生脉冲,判断为旋转体24的旋转的位置到达与规定的角度范围θar(参照图2)的左端部角度θel对应的左端部或者与右端部角度θer对应的右端部。然而,并不限定于此,也可以根据在通过旋转而产生的脉冲的周期的x倍(0<x<2)的时间内没有产生脉冲,判断为旋转体24的旋转的位置到达左端部或者右端部。另外,也可以根据a相的检测信号的输出和b相的检测信号的输出双方成为与非反射对应的低电平的状态,判断为旋转体24的旋转的位置到达左端部或者右端部。
85.(4)在上述实施方式中,将旋转角检测装置的搭载对象设为物体检测装置100(参照图1)进行了说明。然而,旋转角检测装置的搭载对象并不限于物体检测装置100,例如,也可以是照射光的光照射装置、喷雾药剂等的喷雾装置、拍摄装置等在所希望的旋转角范围内使对象物旋转的各种装置。
86.本公开所记载的控制部及其方法也可以通过专用计算机来实现,该专用计算机通过构成被编程为执行由计算机程序具体化的一个或多个功能的处理器以及存储器来提供。或者,本公开所记载的控制部及其方法也可以通过专用计算机来实现,该专用计算机通过利用一个以上的专用硬件逻辑电路构成处理器来提供。或者,本公开所记载的控制部及其方法也可以通过由被编程为执行一个或多个功能的处理器和存储器以及由一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机来实现。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读取的非过渡有形记录介质。
87.本公开并不限定于上述的实施方式,能够在不脱离其主旨的范围内以各种结构来实现。例如,为了解决上述的课题的一部分或者全部、或者为了实现上述的效果的一部分或者全部,与发明内容一栏所记载的各方式中的技术特征对应的实施方式中的技术特征可以适当地进行替换、组合。另外,只要该技术特征在本说明书中不是作为必需的结构来说明的,则能够适当地删除。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。