1.本发明涉及二维码图像距离检测技术领域,尤其是涉及一种基于单个二维码的距离测定系统及其方法。
背景技术:
2.随着当前物流需求快速增长,以无人车物流递送为主的新业态新模式高速发展。而如何通过短距离测定,以有效解决“最后一公里”送货上门、物资存放、文件传递等点对点室内派送问题,是当前亟待解决的研究难点。
3.现有技术已有基于二维码图像距离测定的方案,例如基于小孔成像的单目视觉测距,但这种方式需要先对高清相机进行准确标定,并已知世界坐标系下高清相机的坐标数据,导致在应用上存在很大的局限性,操作较为繁琐复杂,不利于后续快速、准确地实现点对点派送处理。
4.因此,如何快速准确地根据单个二维码图像计算出相机与二维码之间的距离,是实现高效点对点派送的关键问题。
技术实现要素:
5.本发明的目的是克服上述现有技术存在的缺陷,提供一种基于单个二维码的距离测定系统及其方法,从而能够高效准确地获取相机与二维码之间的相对位置数据。
6.本发明的目的可通过以下技术方案来实现:一种基于单个二维码的距离测定系统,包括安装于可移动无人小车的工业摄像机,所述工业摄像机连接有图像扫描器,所述图像扫描器连接有转换模块,所述转换模块连接至处理模块,所述工业摄像机用于拍摄包含二维码的视频画面;
7.所述图像扫描器用于从视频画面中抓取出一幅图像;
8.所述转换模块用于将图像转换为灰度图;
9.所述处理模块用于从灰度图中遍历搜索所有的二维码,之后识别出待测距的二维码,并进行相机与该二维码之间相对距离的测定。
10.进一步地,所述工业摄像机安装在可移动无人小车的顶部。
11.进一步地,所述工业摄像机位于可移动无人小车的车体中线位置,所述工业摄像机的拍摄方向平行于地面。
12.一种基于单个二维码的距离测定方法,包括以下步骤:
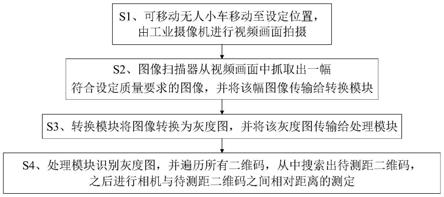
13.s1、可移动无人小车移动至设定位置,由工业摄像机进行视频画面拍摄;
14.s2、图像扫描器从视频画面中抓取出一幅符合设定质量要求的图像,并将该幅图像传输给转换模块;
15.s3、转换模块将图像转换为灰度图,并将该灰度图传输给处理模块;
16.s4、处理模块识别该灰度图,并遍历所有二维码,从中搜索出待测距二维码,之后进行相机与待测距二维码之间相对距离的测定。
17.进一步地,所述步骤s2具体包括以下步骤:
18.s21、根据预先设定的扫描频率,图像扫描器从视频画面中抓取一幅图像;
19.s22、判断抓取的图像是否符合设定的质量要求,若判断为是,则执行步骤s23,否则返回步骤s21;
20.s23、将抓取的图像传输给转换模块。
21.进一步地,所述步骤s4具体包括以下步骤:
22.s41、处理模块识别该灰度图,并遍历找出灰度图中所有二维码;
23.s42、处理模块依次读取每个二维码的内容,并将读取到的内容与预先设置的待测距二维码内容进行固定字段比对,以从所有二维码中搜索出待测距二维码;
24.s43、针对待测距二维码,基于扭曲比例关系进行相机与二维码相对距离的测定。
25.进一步地,所述步骤s43具体包括以下步骤:
26.s431、以摄像头的光心为原点建立空间直角坐标系:由左至右为x轴,由下至上为y轴,由后至前为z轴;
27.根据空间几何关系推算出实际视野高度、二维码实际边长、图像上的视野高度、二维码图上边长,结合已知的摄像头上下视角,推算出二维码中心点在z轴上的坐标z0;
28.s432、利用空间几何关系列方程组,求解出二维码中心点在图像上的坐标xc以及二维码的法向量与z轴的夹角β;
29.s433、利用空间几何关系以及已知xc,求解出二维码中心点与z轴的夹角α,结合二维码的法向量与z轴的夹角β、二维码中心点在z轴上的坐标z0,确定出二维码的位置信息。
30.进一步地,所述步骤s431具体包括以下步骤:
31.s4311、以摄像头的光心为原点建立空间直角坐标系,由左至右为x轴,由下至上为y轴,由后至前为z轴;
32.s4312、利用空间几何关系进行二维码中心点坐标的推算,二维码左右边沿即为两条与y轴平行的线段,假设摄像头上下视角为θ,那么在z轴坐标为z的地方,其视野高度为:
[0033][0034]
假设二维码一边的长度为d,其与视野高度的比例为:
[0035][0036]
图像上线段的长度d与图像上的视野高度h之比具体为:
[0037][0038]
二维码的边长d、图像上的视野高度h为已知数据,设二维码左边沿和右边沿在图像中的长度分别为d1与d2、摄像头上下视角为θ,可通过识别出来的四个顶点坐标推算出d1与d2,可通过设备参数得到常数θ;
[0039]
将二维码左边沿的z轴坐标记作z1,将二维码右边沿的z轴坐标记作z2,那么可以得到:
[0040][0041][0042]
根据等比定理,二维码中心点在z轴上的坐标z0即为z1与z2的均值:
[0043][0044]
进一步地,所述步骤s432具体包括以下步骤:
[0045]
s4321、左右两边z坐标之差与二维码边长d之比,数值上即二维码的法向量与z轴的夹角β的正弦值,假设二维码偏左时β为负,否则为正,那么有:
[0046][0047]
已知β与二维码中心点在z轴上的坐标z0,那么二维码的中心所在的铅垂线即可唯一确定,用于确定二维码中心点在图像上的坐标;
[0048]
s4322、假设二维码四个顶点分别为p0(x0,y0)、p1(x1,y1)、p2(x2,y2)和p3(x3,y3),其中,p0与p2相交、p1与p3相交;
[0049]
设定直线p0-p2方程:y=k1x b1,可以解得:
[0050][0051][0052]
同理,设直线p1-p3方程:y=k2x b2,可以解得:
[0053][0054][0055]
通过列出二元一次方程组,可求出两条直线的交点的横坐标为:
[0056][0057]
即为二维码中心点在图像上的坐标。
[0058]
进一步地,所述步骤s433中二维码中心点与z轴的夹角α具体为:
[0059][0060]
其中,w为二维码在图像中的宽度,是已知数据。
[0061]
与现有技术相比,本发明利用车载的工业摄像机获取包含二维码的图像,通过对图像进行处理,以从图像中获取待测距二维码,再基于扭曲比例关系进行相机与二维码相对距离的测定,具体是通过对二维码四个定位点进行识别,将二维码四个定位点与相机坐
标构成4组3d-2d点对,通过推导计算,即可得到相机与二维码的相对位置,由此能够快速准确地根据单个二维码图像计算出相应距离,能够很好地适用于点对点无人派送系统。
附图说明
[0062]
图1为本发明的系统结构示意图;
[0063]
图2为本发明的方法流程示意图;
[0064]
图3为实施例中工业摄像机在可移动无人小车上的安装效果示意图;
[0065]
图4为求解二维码中心点在z轴上的坐标z0的坐标系侧视图;
[0066]
图5为本发明中设定的坐标系俯视图;
[0067]
图6为本发明中成像模型俯视图;
[0068]
图7为二维码中心点与z轴的夹角α、二维码的法向量与z轴的夹角β、二维码中心点在z轴上的坐标z0的示意图;
[0069]
图中标记说明:1、工业摄像机,2、图像扫描器,3、转换模块,4、处理模块。
具体实施方式
[0070]
下面结合附图和具体实施例对本发明进行详细说明。
[0071]
实施例
[0072]
如图1所示,一种基于单个二维码的距离测定系统,包括安装于可移动无人小车的工业摄像机1,工业摄像机1连接有图像扫描器2,图像扫描器2连接有转换模块3,转换模块3连接至处理模块4,其中,工业摄像机1用于拍摄包含二维码的视频画面;图像扫描器2用于从视频画面中抓取出一幅图像;转换模块3用于将图像转换为灰度图;处理模块4用于从灰度图中遍历搜索所有的二维码,之后识别出待测距的二维码,并进行相机与该二维码之间相对距离的测定。
[0073]
将上述系统应用于实际,以实现一种基于单个二维码的距离测定方法,如图2所示,包括以下步骤:
[0074]
s1、可移动无人小车移动至设定位置,由工业摄像机进行视频画面拍摄;
[0075]
s2、图像扫描器从视频画面中抓取出一幅符合设定质量要求的图像,并将该幅图像传输给转换模块;
[0076]
s3、转换模块将图像转换为灰度图,并将该灰度图传输给处理模块;
[0077]
s4、处理模块识别该灰度图,并遍历找出灰度图中所有二维码,从中搜索出待测距二维码,之后进行相机与待测距二维码之间相对距离的测定。
[0078]
本实施例应用上述技术方案,进行距离测定之前,首先要将工业摄像机安装到可移动无人小车上,其具体安装方式如下:如图3所示,首先根据小车结构选取合适的位置安装并固定摄像机,由于检测的需要,为实现对距离的测定,面向小车正前方加装车载的工业摄像机。在加装工业摄像机时,考虑到成本原因和稳定性,对小车加装摄像机不应对小车顶部的结构进行过大的改动,在考虑到结构的同时,也要考虑车载摄像机的安装位置和角度,以能够完整地正面拍摄到二维码图像。安装的工业摄像机位置应尽可能靠近车体中线,并且方向尽可能地平行于地面,从而有更远的视野。
[0079]
工业摄像机安装好后,则已知摄像头上下视角θ。在小车控制平台上开启摄像头,
运行小车使其驶向二维码所在位置,图像扫描器以扫描频率抓取图像并判断图像质量,符合设定质量要求后传输图像;
[0080]
将彩色拍摄图像转换为灰度图,便于二维码的读取;
[0081]
逐步获取二维码,并遍历所有识别出的二维码;
[0082]
读取所有二维码的内容,根据事先设定的待测距二维码内容,搜索出需要进行测距的二维码,由此避免环境中其他二维码的干扰;
[0083]
之后针对待测距二维码,基于扭曲比例关系进行相机与二维码相对距离的测定。
[0084]
具体地:以摄像头的光心为原点建立空间直角坐标系,由左至右为x轴,由下至上为y轴,由后至前为z轴,利用空间几何关系进行二维码中心点坐标的推算,观察模型俯视图,如图4所示,二维码左右边沿即为两条与y轴平行的线段,摄像头上下视角为θ,那么在z坐标为z的地方,其视野高度为:
[0085][0086]
计算出视野高度后,假设二维码一边的线段长度为d,根据比例关系可知二维码一边长与视野高度的比例,即
[0087][0088]
图像上线段的长度d与图像上的视野高度h之比,应与以上比例相同:
[0089][0090]
二维码的边长d、图像上的视野高度h已知,设二维码左边沿和右边沿在图像中的长度分别为d1与d2,可通过识别出来的四个顶点坐标推算出d1与d2,从而得出左边沿的z轴坐标z1以及右边沿的z轴坐标z2,即有:
[0091][0092]
根据等比定理,二维码中心点在z轴上的坐标z0即为z1与z2的均值,即:
[0093][0094]
确定了二维码中心点在z轴上的坐标后,利用空间几何关系列方程组,求算出二维码中心点在图像上的坐标,观察模型俯视图,如图5所示,可知左右两边z坐标之差与二维码边长d之比为二维码的法向量与z轴的夹角的正弦值β,即
[0095][0096]
此时二维码的中心所在的铅垂线可唯一确定,假设二维码两对对角顶点在图像上的直线方程,可将直线方程参数用对角顶点在图像上的坐标表示,从而求出两条直线交点的横坐标,已知β与二维码中心点的z坐标z0,那么二维码的中心所在的铅垂线即可唯一确定,可用于进一步确定二维码中心点在图像上的坐标,假设二维码四个顶点点分别为p0
(x0,y0)、p1(x1,y1)、p2(x2,y2)和p3(x3,y3),其中p0、p2相交,p1、p3相交;
[0097]
设直线p0-p2方程:y=k1x b1,可以解得:
[0098][0099][0100]
同理,设直线p1-p3方程:y=k2x b2,可以解得:
[0101][0102][0103]
通过列出二元一次方程组,可求出两条直线的交点的横坐标为:
[0104][0105]
即为二维码中心点在图像上的坐标。
[0106]
然后观察成像模型俯视图,在图6中,可根据空间关系推出线段mp与线段mn的比例,即:
[0107][0108]
其中,其中θ
′
是摄像头的水平视角,m点为摄像头水平视角的中心,p点为二维码中心点,n点为摄像头视野的最右侧在墙面的一点。
[0109]
在所拍摄的图像上,该比例应该为:
[0110][0111]
其中,w为二维码在图像中的宽度。
[0112]
该比例与所拍摄图像上对应比例相等,可得等式,即
[0113][0114]
解得:
[0115][0116]
由于水平视角的正切值和上下视角的正切值即为图像宽和高之比,将对应表达式代入上式,可解得
[0117][0118]
至此,二维码中心点与z轴的夹角α、二维码的法向量与z轴的夹角β和二维码中心
点在z轴上的坐标z0都已计算得出,如图7所示,那么在上述两个假设下的二维码位置信息就能够唯一确定。
[0119]
综上可知,本发明提出一种基于单个二维码的距离测定系统及其方法,可应用于室内无人派送系统,通过构建基于单个二维码标签的小车位姿矫正系统,结合slam视觉识别技术,能够有效降低运维成本并提升定位精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。