1.本发明涉及移动机器人技术领域,具体是一种用于全地形移动机器人的驱动分档机构。
背景技术:
2.移动机器人运用广泛,但市场上大多数移动机器人的传动方式不能同时兼顾到动力输出的效率及动力的工作环境,一方面不能使动力模块与车轮模块分离,另一方面无法控制动力输出间断。比较常用的方式是轴与动力模块直连,此方式传动效率高,但由于地面对车轮的冲击力直接传递给电机,使其输出特性不稳定,工作环境差,且无法间断动力输出,实行空档滑行;部分移动机器人采用传动带传动、万向联轴器传动的方式,使动力模块与车轮模块分离,但其动力模块空间占有率大且无传动带张紧机构,同时也无法控制动力输出间断,实现变驱驱动,达到减小能耗的作用。
3.如中国专利申请号为201711258906.3,提出的双三角形悬架轮腿式全地形移动机器人,其采用车毂电机作为驱动电机,地面对车轮的冲击力直接传递到电机上,未能给电机提供稳定的输出环境,导致电机输出效率低,电机的工作寿命缩短。
4.如中国专利申请号为201811301142.6,提出的一种具有主动独立悬架系统的全地形移动机器人,其驱动与车轮刚性直连,无法间断动力输出,实现不了空档滑行,户外故障维修时,难以拖动。
5.又如中国专利申请号为201911096192.x,提出的一种全地形移动机器人,采用蜗轮蜗杆电机,其输出效率低,蜗轮蜗杆电机又与车轮刚性直连,导致其轮组模块惯性大,制动难,在地形较好无需强动力的情况下,无法间断动力,造成动力浪费,无法起到节约能耗的作用。
技术实现要素:
6.为了解决上述问题,本发明提出一种用于全地形移动机器人的驱动分档机构。
7.一种用于全地形移动机器人的驱动分档机构,包括:
8.桁架车基体组件;
9.分档式驱动单元,安装在所述桁架车基体组件上,其包括采用交错平行悬挂方式布置并输出动力的四组动力模块,根据实际需要完成移动机器人的行驶状态和空档滑行状态的切换;
10.双横臂减振单元,连接在每组动力模块与所述桁架车基体组件之间,以增强移动机器人的车身强度及车身稳定性。
11.作为本发明的进一步改进,所述的桁架车基体组件包括桁架车基体、安装在桁架车基体顶部的吊耳座、位于桁架车基体左右两侧的侧立板。
12.作为本发明的进一步改进,每组动力模块均连接有一个实现驱动与传动隔离的传动模块,所述传动模块连接有用于执行传动模块带来的驱动力的车轮模块。
13.作为本发明的进一步改进,所述的动力模块包括孔输出减速器、分别设置在孔输出减速器两端的伺服电机、异形固定板。
14.作为本发明的进一步改进,所述的传动模块包括安装在异形固定板上且一端与孔输出减速器配合的上转轴、与上转轴配合用于传输动力的传动带机构、与传动带机构配合的下转轴、与下转轴配合的万向联轴器、与万向联轴器连接的外车毂联轴器。
15.作为本发明的进一步改进,所述的传动带机构包括对应与上转轴、下转轴配合的两组传动轮、与两组传动轮配合的传动带、设置在传动带上的张紧机构。
16.作为本发明的进一步改进,所述上转轴远离孔输出减速器的一端连接有带轮电磁离合器,所述的带轮电磁离合器与上转轴上的传动轮配合。
17.作为本发明的进一步改进,所述的张紧机构采用摆架式张紧机构,所述的张紧机构包括张紧调节螺柱,所述的张紧调节螺柱上具有双螺母。
18.作为本发明的进一步改进,所述的双横臂减振单元包括第一类u型联动架、第二类u型联动架,所述的第一类u型联动架、第二类u型联动架一端铰接有承载圆盘,所述的第一类u型联动架、第二类u型联动架远离承载圆盘的一端与桁架车基体组件铰接,所述的第一类u型联动架上滑动安装有下悬臂吊耳,所述的下悬臂吊耳上配合有减振器,所述的减振器远离下悬臂吊耳的一端与桁架车基体组件配合。
19.本发明的有益效果是:本发明通过驱动分档机构实现了车轮模块与动力模块分离,减少振动对动力模块的冲击,改善动力模块的工作环境,延长了动力模块的使用寿命,降低电机工况系数,同时也降低了动力模块的安装精度要求及加工制造成本;本发明通过电磁离合器使移动机器人可空档滑行,在其发生故障或电池电量不足时,便于拖拽,同时也可实现驱动电机启停功能,完成对移动机器人的驱动控制,减少电池能耗;通过交错平行悬挂方式布置的动力模块实现了移动机器人轮距的控制,提高了其车身内空间的利用率。
附图说明
20.下面结合附图和实施例对本发明进一步说明。
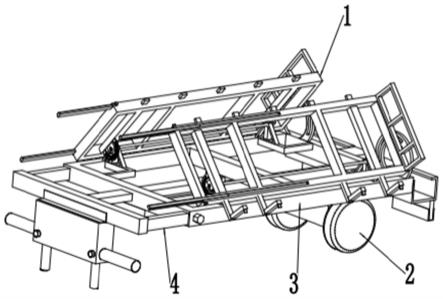
21.图1为本发明的整体立体结构示意图;
22.图2是本发明的部分结构爆炸图;
23.图3是本发明中动力模块空间布局俯视图;
24.图4是本发明中动力模块空间布局侧视图;
25.图5是本发明中传动带的张紧机构结构示意图;
26.图6是本发明中双横臂减振单元局部结构示意图;
27.附图说明:1、桁架车基体组件;101、电池存放防护框;102、桁架车基体;103、动力源基座;104、侧立板;105、吊耳座;2、双横臂减振单元;201、上悬臂吊耳;202、减振器;203、下铰接台;204、第二类u型联动架;205、上铰接台;206、第一类u型联动架;207、下悬臂吊耳;208、锁止电动滑轨;3、分档式驱动单元;301、电磁离合器;302、传动带;303、万向联轴器;304、承载圆盘;305、异形固定板;306、孔输出减速器;307、伺服电机;308、张紧调节螺柱;309、车胎;310、车毂;311、上转轴;312、一号轴承座;313、外车毂联轴器;314、二号轴承座;315、下转轴;316、传动轮。
具体实施方式
28.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
29.如图1至图6所示,一种用于全地形移动机器人的驱动分档机构,包括:
30.桁架车基体组件1;
31.分档式驱动单元3,安装在所述桁架车基体组件1上,其包括采用交错平行悬挂方式布置并输出动力的四组动力模块,根据实际需要完成移动机器人的行驶状态和空档滑行状态的切换;
32.双横臂减振单元2,连接在每组动力模块与所述桁架车基体组件1之间,以增强移动机器人的车身强度及车身稳定性。
33.具体的,本发明通过驱动分档机构实现了车轮模块与动力模块分离,减少振动对动力模块的冲击,改善动力模块的工作环境,延长了动力模块的使用寿命,降低电机工况系数,同时也降低了动力模块的安装精度要求及加工制造成本。
34.本发明通过电磁离合器模块使移动机器人可空档滑行,在其发生故障或电池电量不足时,便于拖拽,同时也可实现驱动电机启停功能,实现移动机器人驱动控制,减少电池能耗;本发明还通过交错平行悬挂方式布置的动力模块实现了移动机器人轮距的控制,提高了其车身内空间的利用率。
35.如图1至图4所示,所述的桁架车基体组件1包括桁架车基体102、安装在桁架车基体102顶部的吊耳座105、位于桁架车基体102前后两侧的侧立板104、位于桁架车基体102中间两侧的电池存放防护框101、位于桁架车基体102下端的动力源基座103。
36.每组动力模块均连接有一个实现驱动与传动隔离的传动模块,所述传动模块连接有用于执行传动模块带来的驱动力的车轮模块。
37.如图1、图2、图3、图5所示,所述的动力模块包括孔输出减速器306、分别设置在孔输出减速器306两端的伺服电机307、异形固定板305,所述的动力模块平行交错铰接在动力源基座103一端的轴上,并悬挂平行交错分布在桁架车基体102前后内部。
38.动力模块平行交错铰接在动力源基座103一端的轴上,并悬挂平行交错分布在车身前后内部,减小移动机器人轮距及动力模块对车身内部空间的占有率,动力模块可绕动力源基座103一端的轴转动,便于动力模块的拆装及带传动的张紧。
39.所述的传动模块包括安装在异形固定板305上且一端与孔输出减速器306配合的上转轴311、与上转轴311配合用于传输动力的传动带机构、与传动带机构配合的下转轴315、与下转轴315配合的万向联轴器303、与万向联轴器303连接的外车毂联轴器313。
40.如图5所示,所述的传动带机构包括对应与上转轴311、下转轴315配合的两组传动轮316、与两组传动轮316配合的传动带302、设置在传动带302上的张紧机构。
41.具体应用时,传动轮可以为同步带轮,传动带可以为与同步带轮配合的同步带。
42.所述上转轴311远离孔输出减速器306的一端连接有带轮电磁离合器301,所述的带轮电磁离合器301与上转轴311上的传动轮316配合。
43.所述的张紧机构采用摆架式张紧机构,所述的张紧机构包括张紧调节螺柱308,所述的张紧调节螺柱308上具有双螺母,一端与异形固定板305使用双螺母夹紧连接,另一端与动力源基座103的另一转轴铰接,通过旋拧双螺母,使异形固定板305转动。
44.所述的异形固定板305外侧安装有若干组一号轴承座312,一组一号轴承座312用于安装上转轴311,另一组一号轴承座312安装在侧立板104的下部。在本发明中,一号轴承座可以为深沟球轴承座。
45.所述的外车毂联轴器313通过轴承配合安装有二号轴承座314。本发明中的二号轴承座可以为角接触球轴承座。
46.如图2和图4所示,一号轴承座312安装在异形固定板305的外侧,上转轴311与一号轴承座312内的轴承配合安装,上转轴311两端分别连接着孔输出减速器306、带轮电磁离合器301,另一一号轴承座312安装在侧立板104的下部,下转轴315与一号轴承座312配合,下转轴315一端与传动轮316相连,另一端与万向联轴器303一端相连,万向联轴器303另一端与外车毂联轴器313相连,外车毂联轴器313与二号轴承座314内轴承配合安装。
47.所述的车轮模块包括车胎309、设置在车胎309上的车毂310。
48.在本发明中,所述的双横臂减振单元2包括第一类u型联动架206、第二类u型联动架204,所述的第一类u型联动架206、第二类u型联动架204一端铰接有承载圆盘304,所述的第一类u型联动架206、第二类u型联动架204远离承载圆盘304的一端与桁架车基体组件1铰接,所述的第一类u型联动架206上滑动安装有下悬臂吊耳207,所述的下悬臂吊耳207上配合有减振器202,所述的减振器202远离下悬臂吊耳207的一端与桁架车基体组件1配合。
49.具体的,所述的双横臂减振单元2还包括在第一类u型联动架206以及第二类u型联动架204开口端连接的上铰接台205、在第一类u型联动架206以及第二类u型联动架204封闭端连接的下铰接台203、安装在第一类u型联动架206内侧的锁止电动滑轨208,所述的下悬臂吊耳207两端分别与锁止电动滑轨208上的滑块连接,所述的上悬臂吊耳201安装在吊耳座105上。
50.所述的二号轴承座314安装在承载圆盘304外侧。
51.本发明通过旋拧双螺母,使异形固定板305转动,调节传动轮中心距以达到张紧目的,也便于传动带302的安装。
52.实际应用中:当移动机器人在复杂路面行驶时,由于车轮模块与动力模块分离,地面对车轮的冲击力沿着车轮传递到减震部分,再传递到车身,动力模块在车身内部,受到被减震部分衰减后的振动,改善了其工作环境;由于在传动模块里设有电磁离合器301,在移动机器人户外故障时,可控制电磁离合器301的离合使移动机器人空档滑行,便于拖拽维修;
53.当移动机器人在复杂路面上行驶且带有负载时,可控制电磁离合器301的离合进行四驱驱动;当移动机器人在平坦路面无负载时,可控制电磁离合器301的离合进行两驱驱动,以减少能耗。
54.本发明使用摆架式张紧机构以及交错平行悬挂方式布置的动力模块,使二者相互融合,提高车身内部空间利用率,同时在减小移动机器人轮距的前提下,使异形固定板305可转动,便于动力模块的拆装与传动带302的张紧。
55.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效
物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。