1.本发明涉及无人驾驶技术领域。
背景技术:
2.炉前调车机车作为冶金、厂矿行业专用机车,往返于铁水炉与炼钢炉之间,通常用于对车辆、铁水“鱼雷罐”进行编组、运用作业等工作。其相对运行速度较低,在特定的炉前作业路线上运行速度范围为5
‑‑
20公里/小时。炉前调车机车的作业环境一般具有环境温度高、粉尘浓度大、铁水喷溅等特点,因此多数炉前调车机车采用遥控功能,操作人员通过手持设备在有效距离内(400米)进行机车作业。
3.随着技术的发展,一部分冶金、厂矿行业的炉前调车机车加装了无人驾驶功能,遥控功能变为冷备份功能。但是现有的模式切换方式为人工手动切换,浪费了时间及人力,特殊情况时造成整条运行线路堵塞,因此需要一种全新的无人驾驶模式与遥控模式切换的控制方法。
4.机车出现故障后,操作人员需手动复位故障并转换机车操纵台万转开关,如万转开关损坏或线路接触不良时,微机系统无法完成模式切换,整个模式切换过程既需要一定的人力和时间,造成了不必要的浪费,特殊情况时还会造成整条作业线路堵塞的缺点。
技术实现要素:
5.炉前调车机车无人驾驶模式与遥控模式自动切换的控制方法,包括:
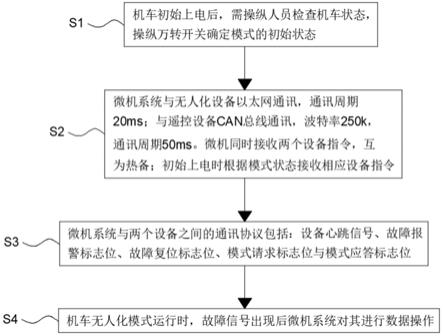
6.s1:机车初始上电后,操纵人员检查机车状态,操纵万转开关确定模式的初始状态;
7.s2:微机系统与无人化设备以太网通讯,通讯周期20ms;与遥控设备can总线通讯,波特率250k,通讯周期50ms。微机同时接收两个设备指令,互为热备;初始上电时根据模式状态接收相应设备指令;
8.s3:微机系统与两个设备之间的通讯协议包括:设备心跳信号、故障报警标志位、故障复位标志位、模式请求标志位与模式应答标志位;
9.s4:机车无人化模式运行时,故障信号出现后微机系统对其进行数据操作。
10.优选地,所述步骤s4中还包括以下步骤:
11.s401:机车无人化模式运行时无人化车载部件损坏、感知系统失效、无线通讯丢失时,通过故障报警标志传递相应故障信息,微机系统在3个周期(90ms)时给无人化设备传递故障复位信号,故障复位后机车继续运行;
12.s402:若故障复位后再次出现,微机系统可继续进行故障复位,三分钟内连续出现3次相同故障后,自动故障复位功能锁死;
13.s403:无人化设备心跳信号15个周期(300ms)无变化时,微机系统认为无人化设备以太网通讯丢失。
14.优选地,所述s402与s403任一条件触发后,微机系统控制机车声光报警并施加紧
急制动,机车速度为0后微机系统通过模式请求标志位给遥控设备下发模式切换请求,遥控设备收到请求后回馈模式应答标志位。
15.优选地,所述微机系统收到模式应答指令后,解除机车声光报警和紧急制动,施加常规最大制动力,同时自动切换到遥控模式,操纵人员可通过手持设备在有效范围内接管机车运行作业。
16.优选地,所述机车速度为0时,施加常规最大制动力;
17.优选地,所述s401、s402与s403条件均未触发时,无人化设备下发模式请求标志位。
18.优选地,所述当机车速度为0时,s401、s402与s403条件均未触发时和无人化设备下发模式请求标志位条件均满足后,微机系统回馈模式应答标志位,同时自动切换到无人化模式,机车接收无人化指令继续运行作业。
19.优选地,所述满足机车自动模式切换:机车操纵台安装万转开关,用于初始化上电的模式选择;两端车顶部具有红黄报警灯及声音报警设备;两端车顶部具有速度及模式显示屏。
20.相比于现有技术,本发明的优点在于:
21.本发明提供一种炉前调车机车无人驾驶模式与遥控模式自动切换的控制方法,微机系统采集无人化设备和遥控设备的指令,通过分析、判断完成机车故障自动复位、完成机车模式自动切换。操作人员能快速的通过手持设备在有效范围内进行机车控制,保障整条作业线路的正常运行,避免了不必要的浪费。
附图说明
22.图1为本发明的炉前调车机车无人驾驶模式与遥控模式自动切换的控制方法步骤流程图;
23.图2为本发明的炉前调车机车无人驾驶模式与遥控模式自动切换的控制方法无人化模式自动切换遥控模式示意图;
24.图3为本发明的炉前调车机车无人驾驶模式与遥控模式自动切换的控制方法遥控模式自动切换无人化模式示意图。
具体实施方式
25.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“纵向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
27.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元内部的连通。对于本领域的普通技术人员而言,可以具体情
况理解上述术语在本发明中的具体含义。
28.请参阅图1-3,本发明提供一种技术方案:
29.炉前调车机车无人驾驶模式与遥控模式自动切换的控制方法,包括以下步骤:
30.s1:机车初始上电后,需操纵人员检查机车状态,操纵万转开关确定模式的初始状态;
31.s2:微机系统与无人化设备以太网通讯,通讯周期20ms;与遥控设备can总线通讯,波特率250k,通讯周期50ms。微机同时接收两个设备指令,互为热备;初始上电时根据模式状态接收相应设备指令;
32.s3:微机系统与两个设备之间的通讯协议包括:设备心跳信号、故障报警标志位、故障复位标志位、模式请求标志位与模式应答标志位;
33.s4:机车无人化模式运行时,故障信号出现后微机系统对其进行数据操作。
34.步骤s4中还包括以下步骤:s401:机车无人化模式运行时无人化车载部件损坏、感知系统失效、无线通讯丢失时,通过故障报警标志传递相应故障信息,微机系统在3个周期(90ms)时给无人化设备传递故障复位信号,故障复位后机车继续运行;
35.s402:若故障复位后再次出现,微机系统可继续进行故障复位,三分钟内连续出现3次相同故障后,自动故障复位功能锁死;
36.s403:无人化设备心跳信号15个周期(300ms)无变化时,微机系统认为无人化设备以太网通讯丢失。
37.s402与s403任一条件触发后,微机系统控制机车声光报警并施加紧急制动,机车速度为0后微机系统通过模式请求标志位给遥控设备下发模式切换请求,遥控设备收到请求后回馈模式应答标志位,微机系统收到模式应答指令后,解除机车声光报警和紧急制动,施加常规最大制动力,同时自动切换到遥控模式,操纵人员可通过手持设备在有效范围内接管机车运行作业,机车速度为0时,施加常规最大制动力,s401、s402与s403条件均未触发时,无人化设备下发模式请求标志位,当机车速度为0时,s401、s402与s403条件均未触发时和无人化设备下发模式请求标志位条件均满足后,微机系统回馈模式应答标志位,同时自动切换到无人化模式,机车接收无人化指令继续运行作业。
38.满足机车自动模式切换:机车操纵台安装万转开关,用于初始化上电的模式选择;两端车顶部具有红黄报警灯及声音报警设备;两端车顶部具有速度及模式显示屏。
39.低速油电混合动力调车机车是我公司自主生产的炉前调车机车,根据客户要求具备无人驾驶功能和遥控驾驶功能。整条作业线路采用无人化控制,机车无人化模式为主要工作模式,遥控模式作为热备。机车配备如下设备,满足机车自动模式切换:
40.1)机车操纵台安装万转开关,用于初始化上电的模式选择。
41.2)两端车顶部具有红黄报警灯及声音报警设备,用于提示操纵人员机车是否存在故障。
42.3)两端车顶部具有速度及模式显示屏,用于显示机车速度和机车驾驶模式。
43.微机系统采集无人化设备和遥控设备的指令,通过分析、判断完成机车故障自动复位、完成机车模式自动切换。操作人员能快速的通过手持设备在有效范围内进行机车控制,保障整条作业线路的正常运行,避免了不必要的浪费。
44.综上所述:机车初始上电后,需操纵人员检查机车状态,操纵万转开关确定模式的
初始状态,微机系统与无人化设备以太网通讯,通讯周期20ms;与遥控设备can总线通讯,波特率250k,通讯周期50ms。微机同时接收两个设备指令,互为热备;初始上电时根据模式状态接收相应设备指令,微机系统与两个设备之间的通讯协议包括:设备心跳信号、故障报警标志位、故障复位标志位、模式请求标志位与模式应答标志位,机车无人化模式运行时,故障信号出现后微机系统对其进行数据操作,机车无人化模式运行时无人化车载部件损坏、感知系统失效、无线通讯丢失时,通过故障报警标志传递相应故障信息,微机系统在3个周期(90ms)时给无人化设备传递故障复位信号,故障复位后机车继续运行,若故障复位后再次出现,微机系统可继续进行故障复位,三分钟内连续出现3次相同故障后,自动故障复位功能锁死,无人化设备心跳信号15个周期(300ms)无变化时,微机系统认为无人化设备以太网通讯丢失,s402与s403任一条件触发后,微机系统控制机车声光报警并施加紧急制动,机车速度为0后微机系统通过模式请求标志位给遥控设备下发模式切换请求,遥控设备收到请求后回馈模式应答标志位,微机系统收到模式应答指令后,解除机车声光报警和紧急制动,施加常规最大制动力,同时自动切换到遥控模式,操纵人员可通过手持设备在有效范围内接管机车运行作业,机车速度为0时,施加常规最大制动力,s401、s402与s403条件均未触发时,无人化设备下发模式请求标志位,当机车速度为0时,s401、s402与s403条件均未触发时和无人化设备下发模式请求标志位条件均满足后,微机系统回馈模式应答标志位,同时自动切换到无人化模式,机车接收无人化指令继续运行作业,满足机车自动模式切换:机车操纵台安装万转开关,用于初始化上电的模式选择;两端车顶部具有红黄报警灯及声音报警设备;两端车顶部具有速度及模式显示屏,低速油电混合动力调车机车是我公司自主生产的炉前调车机车,根据客户要求具备无人驾驶功能和遥控驾驶功能。整条作业线路采用无人化控制,机车无人化模式为主要工作模式,遥控模式作为热备,机车配备如下设备,满足机车自动模式切换,微机系统采集无人化设备和遥控设备的指令,通过分析、判断完成机车故障自动复位、完成机车模式自动切换。操作人员能快速的通过手持设备在有效范围内进行机车控制,保障整条作业线路的正常运行,避免了不必要的浪费。
45.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。